") 如何利用NVIDIA中的單視角3D追蹤功能減輕視覺感知中的遮擋現(xiàn)象?
如何利用NVIDIA中的單視角3D追蹤功能減輕視覺感知中的遮擋現(xiàn)象?
說(shuō)到智能視頻分析(IVA)應(yīng)用(如交通監(jiān)控、倉(cāng)庫(kù)安全和零售消費(fèi)者分析)的感知,最大的挑戰(zhàn)之一就是遮擋。例如,人們可能會(huì)移動(dòng)到結(jié)構(gòu)性障礙物后面,零售消費(fèi)者可能由于貨架而無(wú)法被完全看到,汽車可能會(huì)被隱藏在大型卡車后面。
本文將介紹如何利用NVIDIA DeepStream SDK中全新的單視角 3D 追蹤功能,來(lái)解決現(xiàn)實(shí)生活中 IVA 部署常見的視覺感知遮擋問(wèn)題。
視覺感知中的視角和投影
在我們的物理世界中,通過(guò)相機(jī)鏡頭觀察到的一些物體的運(yùn)動(dòng)可能看起來(lái)并不穩(wěn)定,這是由于相機(jī)對(duì) 3D 世界的 2D 呈現(xiàn)所造成的。
水星和火星等行星的逆行就是一個(gè)例子,這讓古希臘天文學(xué)家感到困惑。他們無(wú)法解釋為什么行星有時(shí)看起來(lái)會(huì)向后移動(dòng)(圖 1)。
之所以會(huì)出現(xiàn)明顯退行,是由于恒星和行星在夜空中的軌跡所造成的。這些是宇宙 3D 空間中軌道運(yùn)動(dòng)在夜空2D畫布上的投影,如果古代天文學(xué)家知道3D空間的運(yùn)動(dòng)模式,他們就可以預(yù)測(cè)這些行星在2D夜空中的出現(xiàn)。
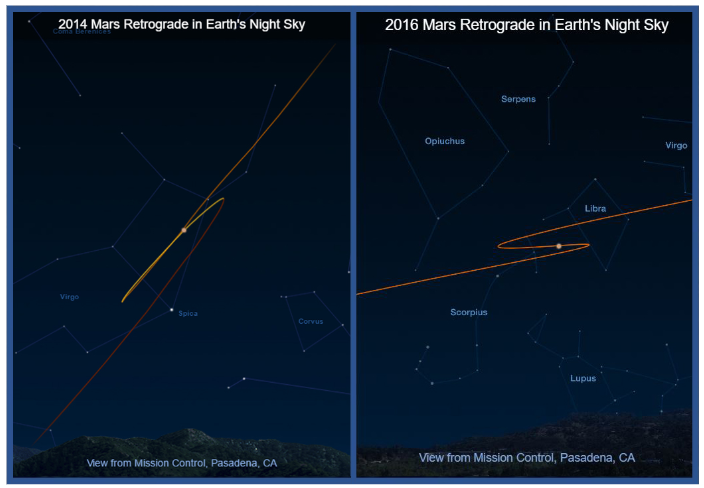
圖 1. 2014 年(左)和 2016 年(右)
火星在夜空中的逆行運(yùn)動(dòng)軌跡(圖片來(lái)源:NASA)
交通監(jiān)控?cái)z像頭提供了類似的例子。這些攝像頭通常用于監(jiān)測(cè)一個(gè)大面積的區(qū)域,在這個(gè)區(qū)域里,車輛在近場(chǎng)和遠(yuǎn)場(chǎng)的運(yùn)動(dòng)動(dòng)態(tài)可能截然不同。
在視頻 1 中,遠(yuǎn)處的車輛看起來(lái)較小且移動(dòng)緩慢。當(dāng)車輛靠近攝像頭并轉(zhuǎn)彎時(shí),可以觀察到物體運(yùn)動(dòng)的突然變化。這些變化使得我們?cè)?2D 攝像機(jī)視圖中很難找到常見的模式,因此也很難預(yù)測(cè)車輛未來(lái)可能移動(dòng)的位置。
視頻 1. 近場(chǎng)車輛似乎移動(dòng)得很快,
而遠(yuǎn)場(chǎng)車輛則移動(dòng)得較慢
物體跟蹤本質(zhì)上是對(duì)物體物理狀態(tài)的連續(xù)估計(jì),同時(shí)隨著時(shí)間的推移來(lái)識(shí)別其獨(dú)特身份。該過(guò)程通常包括對(duì)物體運(yùn)動(dòng)動(dòng)態(tài)進(jìn)行建模和預(yù)測(cè),以抑制測(cè)量(檢測(cè))中的固有干擾。從所提供的示例來(lái)看,直接在原生3D空間中對(duì)物體狀態(tài)進(jìn)行估計(jì)和預(yù)測(cè)顯然比在投影的2D 攝像頭圖像平面中效果更好,這是因?yàn)槲矬w存在于3D空間中。
使用 NVIDIA DeepStream進(jìn)行單視角 3D 跟蹤
NVIDIA DeepStream SDK 是一個(gè)基于 GStreamer 的完整流媒體分析工具包,可用于基于 AI 的多傳感器處理,視頻、音頻和圖像理解。DeepStream 6.4 版本引入了一種名為單視角 3D 跟蹤(SV3DT)的新功能,該功能能夠在單攝像頭視圖內(nèi)估計(jì) 3D 物理世界中的物體狀態(tài)。
這一過(guò)程包括使用每個(gè)攝像頭的 3×4 投影矩陣或攝像頭矩陣,將 2D 攝像頭圖像平面上的觀測(cè)測(cè)量轉(zhuǎn)換為 3D 世界坐標(biāo)系。物體在3D世界地平面中的位置表示為物體底部的中心,因此,行人被建模為一個(gè)立在世界地面平面上的圓柱體(具有高度和半徑),圓柱體模型底部的中心是行人的腳部位置(圖 2)。

圖 2. 每個(gè)圓柱形模型的底部中心表示
每個(gè)行人在 3D 世界地平面上的位置(用綠點(diǎn)標(biāo)記)
使用 3×4 投影矩陣和圓柱形人體模型,可以估算出針對(duì)檢測(cè)到物體的 3D 人體模型在 3D 世界地平面上的位置,從而使投影在 2D 攝像頭圖像平面上的 3D 人體模型,與檢測(cè)到的物體的邊界框相吻合。
例如,在圖 3(左)中,灰色邊界框表示對(duì)象檢測(cè)器使用NVIDIA TAO PeopleNet模型檢測(cè)到的物體,紫色和黃色圓柱體代表從 3D 世界地平面上的估計(jì)位置投影到 2D 攝像頭圖像平面的相應(yīng)的 3D 人體模型,投影的 3D 人體模型底部的綠點(diǎn)代表預(yù)估的腳部位置。盡管攝像頭視圖有透視和旋轉(zhuǎn),但這些位置與實(shí)際腳部位置非常吻合。
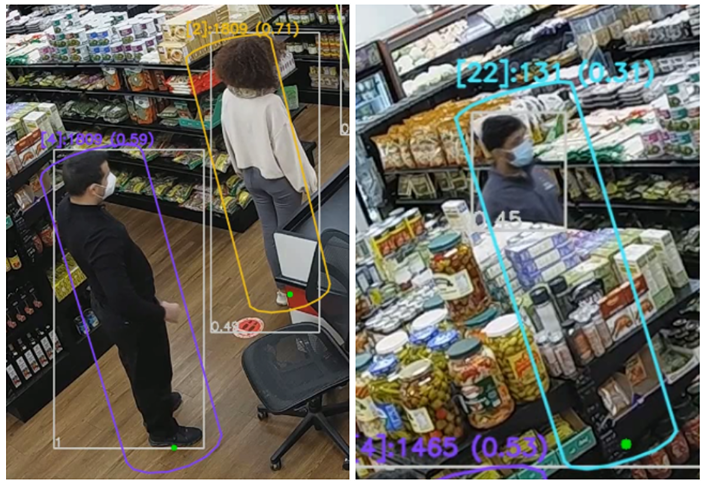
圖 3. SV3DT 有助于跟蹤零售消費(fèi)者準(zhǔn)確的腳部位置,
即使存在遮擋也不影響
新推出的 DeepStream SV3DT 功能的一個(gè)重要優(yōu)勢(shì)是,即使存在明顯的局部遮擋,也可以準(zhǔn)確地找到物體的 2D 和 3D 腳部位置,而這是現(xiàn)實(shí)世界 IVA 應(yīng)用中最具挑戰(zhàn)性的問(wèn)題之一。
例如,圖 3(右)顯示了一個(gè)人在狹窄的過(guò)道里購(gòu)物,攝像頭只能看到其上半身的一小部分,這將導(dǎo)致物體邊界框較小,只能捕獲頭部和肩部區(qū)域。在這種情況下,要在全局商店地圖上對(duì)此人進(jìn)行定位就變得極具挑戰(zhàn)性,至少可以說(shuō),估計(jì)腳部位置是一項(xiàng)非同小可的任務(wù)。
使用邊界框的底部中心作為對(duì)象位置的代表會(huì)為軌跡估計(jì)帶來(lái)很大的誤差。即使使用攝像頭校準(zhǔn)信息將 2D 點(diǎn)轉(zhuǎn)換為 3D 點(diǎn)情況也是如此,尤其是當(dāng)攝像頭透視和旋轉(zhuǎn)較大時(shí)。
DeepStream SDK 中的多目標(biāo)跟蹤器模塊中的 SV3DT 算法,在假設(shè)攝像頭安裝在頭部上方的情況下,通過(guò)利用 3D 人體建模信息來(lái)解決這個(gè)問(wèn)題。大多數(shù)部署在智能空間中的大型攝像頭網(wǎng)絡(luò)系統(tǒng)通常都是這種情況。有了這個(gè)假設(shè),在估算相應(yīng)的 3D 人體模型位置時(shí),就可以使用頭部作為錨點(diǎn)。如圖 3 顯示,即使在人被嚴(yán)重遮擋的情況下,SV3DT 算法也可以成功地找到匹配的 3D 人體模型位置。
視頻 2 顯示了在一家便利店中對(duì)消費(fèi)者進(jìn)行跟蹤的情況。需要注意的是,所使用的 3×4 投影矩陣沒(méi)有考慮鏡頭失真,盡管特定的攝像頭有一定的鏡頭失真,正如您所看到的,水平線有點(diǎn)彎曲而不是直線。這會(huì)導(dǎo)致 3D 人體模型位置估計(jì)更加不準(zhǔn)確,尤其是當(dāng)人位于視頻幀的邊緣時(shí)。
盡管如此,人們?cè)诒憷甑?2D 和 3D 腳部位置(用綠點(diǎn)表示)還是被準(zhǔn)確而穩(wěn)健地追蹤到了,這也提高了隊(duì)列長(zhǎng)度監(jiān)控和占用率地圖等其他分析的準(zhǔn)確性。
圖 4 顯示了如何在合成數(shù)據(jù)集中穩(wěn)健地追蹤每個(gè)行人的腳部位置,即使下半身的大部分被貨架等大型物體遮擋。

圖 4. 基于合成數(shù)據(jù)集的嚴(yán)重顆粒遮擋情況下的SV3DT 行人位置跟蹤
我們相信,解決部分遮擋問(wèn)題將為現(xiàn)實(shí)應(yīng)用帶來(lái)許多可能性。SV3DT 目前處于 Alpha 模式,因?yàn)槠鋵?duì)象類型支持有限(僅限站立的人),其他情況(如人們坐著和躺著)或其他對(duì)象類型可能會(huì)在未來(lái)的版本中得到支持。
DeepStream SV3DT 用例
該 DeepStream SV3DT 用例演示了如何在本文介紹的零售商店視頻上啟用單視角 3D 跟蹤,并從管道中保存 3D 元數(shù)據(jù)。如圖 4 和視頻 2 所示,用戶可以從數(shù)據(jù)中可視化凸起的船體和腳部位置。README 還介紹了如何在定制視頻上運(yùn)行該算法。
總結(jié)
NVIDIA DeepStream SDK 中的單視角 3D 跟蹤有助于緩解現(xiàn)實(shí)生活中 IVA 應(yīng)用程序和部署的部分遮擋問(wèn)題。該功能在 6.4 版本中首次推出,并在 7.0 版本中進(jìn)行了增強(qiáng)。具體而言,SV3DT 能夠在局部遮擋的情況下估計(jì)腳部位置,并能夠進(jìn)行更穩(wěn)健和準(zhǔn)確的對(duì)象追蹤,從而實(shí)現(xiàn) 3D 地平面中的準(zhǔn)確定位。依賴或利用地理空間分析的企業(yè)有望從這項(xiàng)技術(shù)中受益。
-
傳感器
+關(guān)注
關(guān)注
2550文章
51035瀏覽量
753083 -
NVIDIA
+關(guān)注
關(guān)注
14文章
4978瀏覽量
102990 -
攝像頭
+關(guān)注
關(guān)注
59文章
4836瀏覽量
95599
原文標(biāo)題:利用 NVIDIA DeepStream 中的單視角 3D 跟蹤技術(shù)減輕視覺感知中的遮擋現(xiàn)象
文章出處:【微信號(hào):NVIDIA-Enterprise,微信公眾號(hào):NVIDIA英偉達(dá)企業(yè)解決方案】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
3D視覺技術(shù)廣闊的應(yīng)用前景
OpenCV攜奧比中光3D相機(jī)亮相CVPR 2024
蘇州吳中區(qū)多色PCB板元器件3D視覺檢測(cè)技術(shù)

奧比中光英偉達(dá)聯(lián)辦3D視覺創(chuàng)新應(yīng)用競(jìng)賽圓滿收官
天馬微電子首發(fā)TIANMA META SIGHT光場(chǎng)3D解決方案

奧比中光攜多款3D相機(jī)深度參與國(guó)內(nèi)3D視覺最高規(guī)格會(huì)議

3D視覺技術(shù):物流倉(cāng)儲(chǔ)中的“智慧之眼”
奧比中光3D相機(jī)及方案亮相,攜手NVIDIA探索機(jī)器人應(yīng)用革新
奧比中光3D相機(jī)及方案亮相,攜手NVIDIA探索機(jī)器人應(yīng)用革新
高分工作!Uni3D:3D基礎(chǔ)大模型,刷新多個(gè)SOTA!

3D視覺引導(dǎo)3C薄片自動(dòng)化上料

技術(shù)基因+自主創(chuàng)新,光鑒科技塑造3D視覺感知新范式






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論