") EtherCAT運(yùn)動(dòng)控制器在UVW對(duì)位平臺(tái)中的應(yīng)用
EtherCAT運(yùn)動(dòng)控制器在UVW對(duì)位平臺(tái)中的應(yīng)用
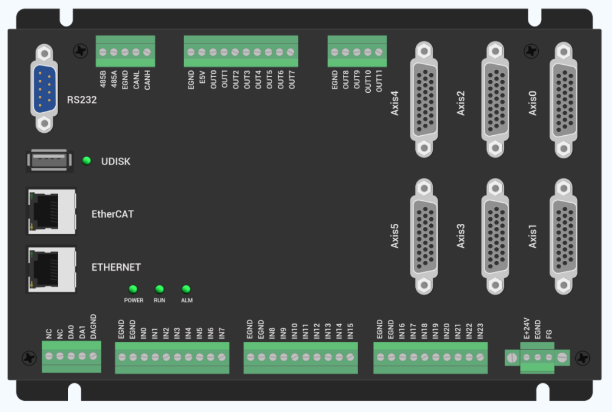
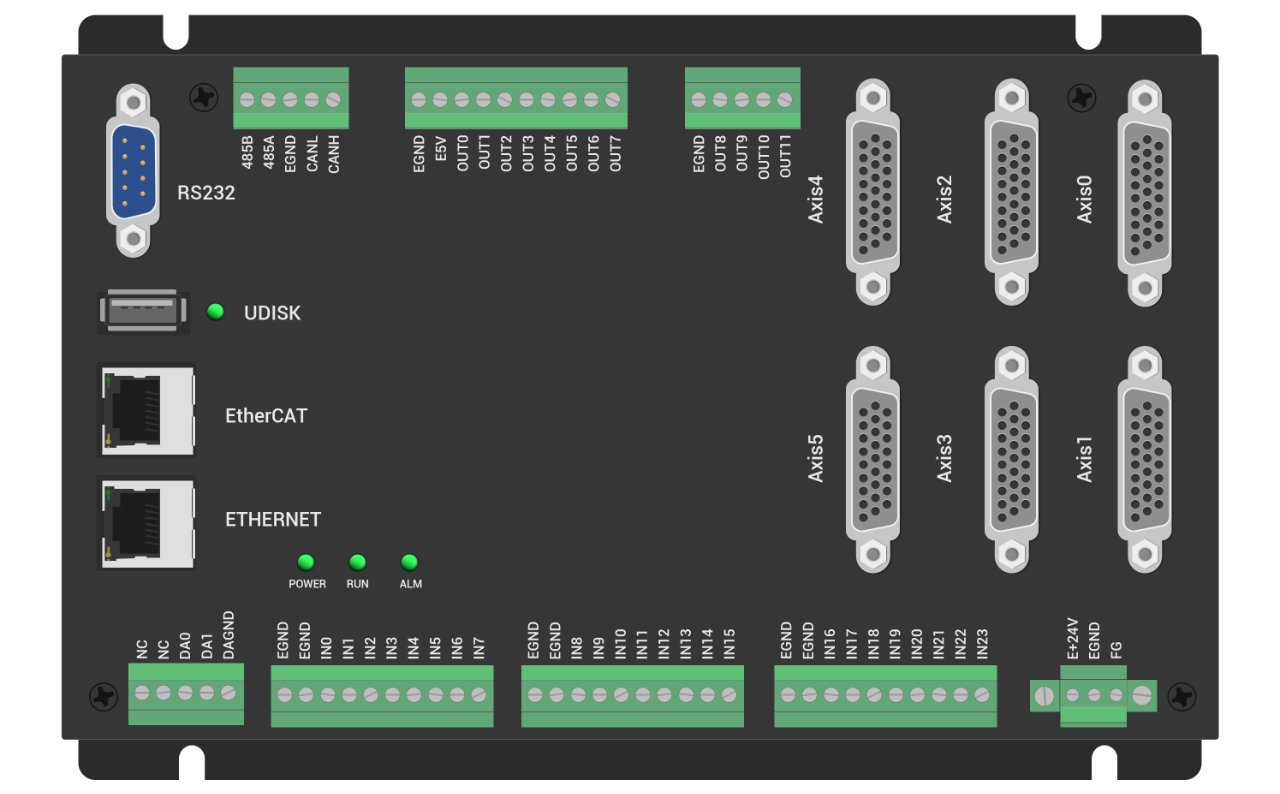
ZMC406硬件介紹
ZMC406是正運(yùn)動(dòng)推出的一款多軸高性能EtherCAT總線運(yùn)動(dòng)控制器,具有EtherCAT、EtherNET、RS232、CAN和U盤(pán)等通訊接口,ZMC系列運(yùn)動(dòng)控制器可應(yīng)用于各種需要脫機(jī)或聯(lián)機(jī)運(yùn)行的場(chǎng)合。
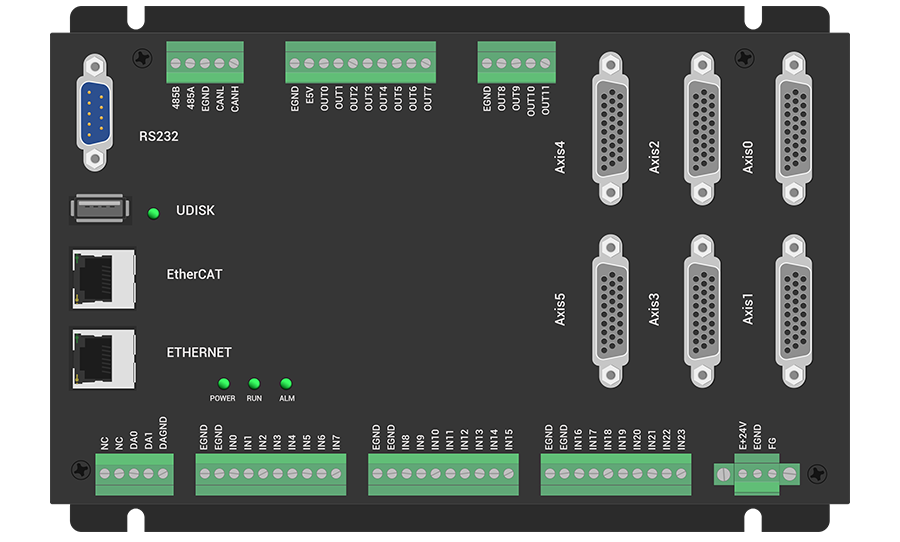
ZMC406支持6軸運(yùn)動(dòng)控制,最多可擴(kuò)展至32軸,支持直線插補(bǔ)、任意圓弧插補(bǔ)、空間圓弧、螺旋插補(bǔ)、電子凸輪、電子齒輪、同步跟隨等功能。
ZMC406支持PLC、Basic、HMI組態(tài)三種編程方式。PC上位機(jī)API編程支持C#、C++、LabVIEW、Matlab、Qt、Linux、VB.Net、Python等接口。
ZMC406支持6軸運(yùn)動(dòng)控制,可采用脈沖軸(帶編碼器反饋)或EtherCAT總線軸,通用IO包含24路輸入口和12路輸出口,模擬量AD/DA各兩路,EtherCAT最快125us的刷新周期。
此類運(yùn)動(dòng)控制器與PCI運(yùn)動(dòng)控制卡相比具有如下優(yōu)點(diǎn):
(1)不使用插槽,穩(wěn)定性更好;
(3)控制器直接做接線板使用,節(jié)省空間;
(4)控制器上可以并行運(yùn)行程序,與PC只需要簡(jiǎn)單交互,降低PC軟件的復(fù)雜性等優(yōu)勢(shì)。
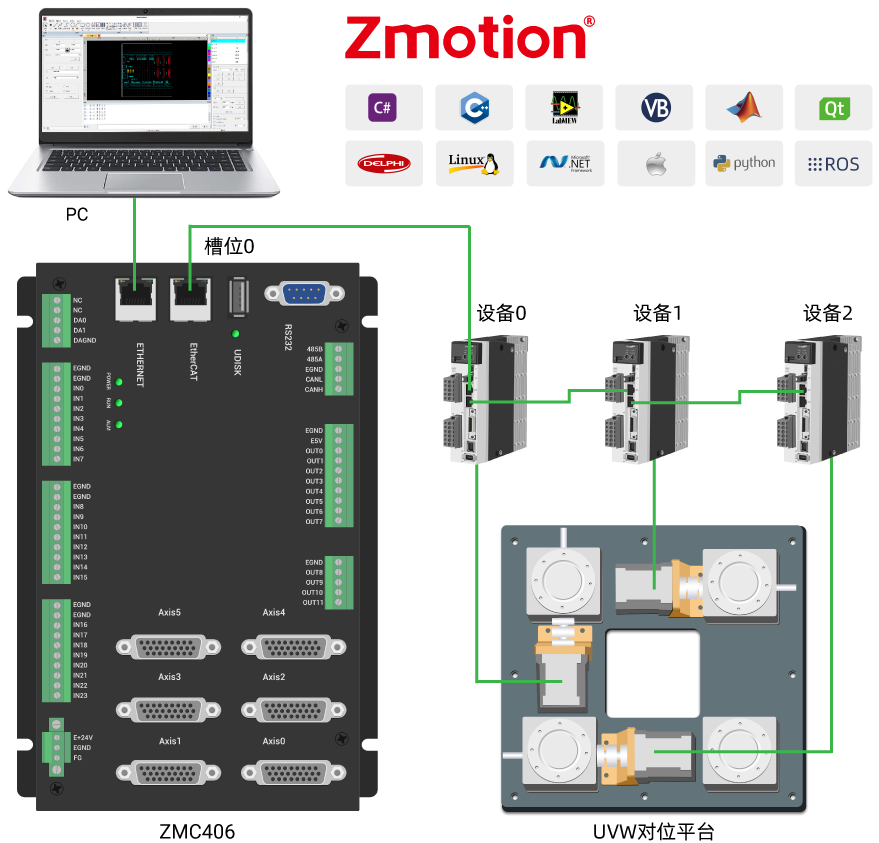
ZMC控制器通過(guò)RTSys開(kāi)發(fā)環(huán)境來(lái)調(diào)試,RTSys是一個(gè)方便的編程、編譯和調(diào)試環(huán)境。RTSys可以通過(guò)串口、以太網(wǎng)、PCI和LOCAL與控制器建立連接。應(yīng)用程序可以使用VC,VB,VS,C++Builder,C#等軟件來(lái)開(kāi)發(fā)。調(diào)試時(shí)可以把RTSys軟件同時(shí)連接到控制器,程序運(yùn)行時(shí)需要?jiǎng)討B(tài)庫(kù)zmotion.dll。
ZMC4系列控制器支持PPR,PRP結(jié)構(gòu)的3軸UVW平臺(tái),關(guān)節(jié)軸U+關(guān)節(jié)軸V+關(guān)節(jié)軸W。采用脫機(jī)的方式將編輯好的程序下載到控制器上(也可以用PC監(jiān)視或者實(shí)時(shí)發(fā)送指令操作),可利用觸摸屏示教的方式編輯想要運(yùn)動(dòng)的軌跡。
??? UVW對(duì)位平臺(tái)介紹
1、UVW平臺(tái)
UVW平臺(tái),也被稱為XXY平臺(tái)或XYR對(duì)位平臺(tái),是一種高精度移動(dòng)平臺(tái),專為高精度對(duì)位設(shè)備而設(shè)計(jì)。
該平臺(tái)屬于三軸并聯(lián)運(yùn)動(dòng)機(jī)構(gòu),通過(guò)控制三個(gè)線性移動(dòng)軸的并聯(lián)運(yùn)動(dòng),可以實(shí)現(xiàn)以平面上任意一點(diǎn)為中心進(jìn)行旋轉(zhuǎn)運(yùn)動(dòng)以及沿任意方向平移。這種設(shè)計(jì)使得UVW平臺(tái)在工業(yè)自動(dòng)化中成為一個(gè)核心技術(shù),特別適用于需要高精度對(duì)位功能的應(yīng)用場(chǎng)景。
2、UVW平臺(tái)的應(yīng)用場(chǎng)景與優(yōu)勢(shì)
UVW平臺(tái)與視覺(jué)CCD糾偏系統(tǒng)對(duì)接在一起,可以迅速完成高精度的糾偏工作,其重復(fù)定位精度一般可達(dá)±1μm。與以前的xyθ平臺(tái)相比,UVW平臺(tái)在控制精度和靈活性方面都有顯著的優(yōu)勢(shì)。
UVW平臺(tái)的控制精度高于xyθ平臺(tái),并且它可以在平面上的任意一點(diǎn)為中心進(jìn)行旋轉(zhuǎn)運(yùn)動(dòng),而xyθ平臺(tái)的旋轉(zhuǎn)中心則必須固定在平臺(tái)上某處并隨平臺(tái)一同運(yùn)動(dòng)。
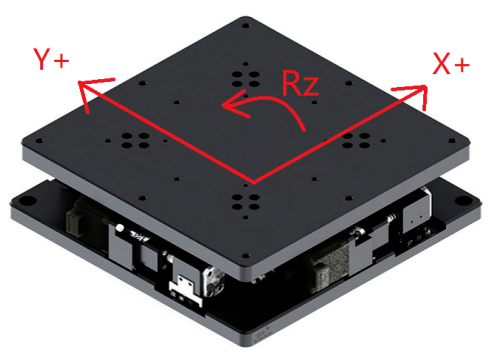
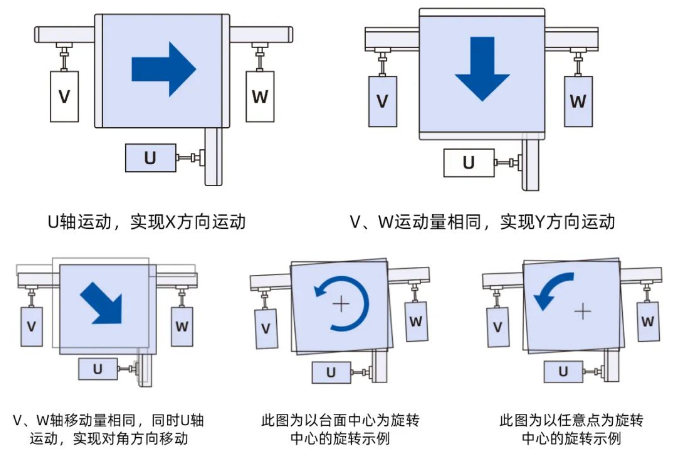
此外,UVW平臺(tái)需要一個(gè)絕對(duì)坐標(biāo)系作為參考系,而xyθ平臺(tái)則使用隨平臺(tái)動(dòng)的坐標(biāo)系作為參考系。UVW平臺(tái)?作模式如下圖:
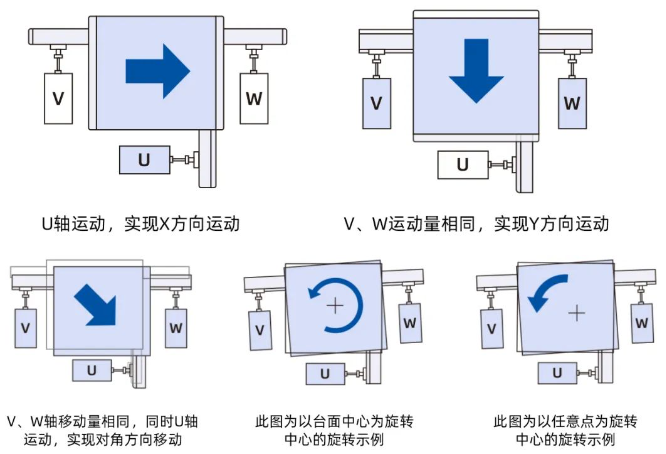
UVW平臺(tái)主要應(yīng)用于曝光機(jī)、絲印機(jī)、貼合機(jī)等PCB及半導(dǎo)體等行業(yè)。在這些應(yīng)用中,UVW平臺(tái)通過(guò)配合機(jī)器視覺(jué)系統(tǒng),實(shí)現(xiàn)高精度對(duì)位功能,從而提高生產(chǎn)效率和產(chǎn)品質(zhì)量。總的來(lái)說(shuō),UVW平臺(tái)以其高精度、高靈活性和廣泛的應(yīng)用領(lǐng)域,成為現(xiàn)代工業(yè)自動(dòng)化中不可或缺的一部分。
3、PPR結(jié)構(gòu)和PRP結(jié)構(gòu)的UVW平臺(tái)區(qū)別
UVW平臺(tái)的PPR和PRP結(jié)構(gòu)區(qū)別主要體現(xiàn)在其構(gòu)型和應(yīng)用特點(diǎn)上。
首先,從構(gòu)型上來(lái)看,PPR和PRP結(jié)構(gòu)代表了UVW平臺(tái)的不同設(shè)計(jì)方式。這兩種結(jié)構(gòu)都是UVW平臺(tái)的常見(jiàn)形式,但它們?cè)诰唧w的機(jī)械布局、運(yùn)動(dòng)軸的配置以及關(guān)節(jié)連接方式等方面可能存在差異。這種差異使得PPR和PRP結(jié)構(gòu)在剛度、穩(wěn)定性以及精度等方面可能表現(xiàn)出不同的性能。
其次,從應(yīng)用特點(diǎn)上來(lái)看,PPR結(jié)構(gòu)的UVW平臺(tái)可能更注重于結(jié)構(gòu)的穩(wěn)定性和精度,適用于對(duì)精度要求較高且需要穩(wěn)定運(yùn)動(dòng)的場(chǎng)景。而PRP結(jié)構(gòu)的UVW平臺(tái)可能在一些特定的應(yīng)用場(chǎng)景中具有優(yōu)勢(shì),比如在一些需要更高靈活性或更復(fù)雜運(yùn)動(dòng)模式的場(chǎng)合。
??? 正運(yùn)動(dòng)UVW機(jī)械手模型
正運(yùn)動(dòng)技術(shù)UVW平臺(tái)運(yùn)動(dòng)控制算法于UVW有三種常見(jiàn)模型:FRAME33、FRAME34、FRAME37。
分別對(duì)應(yīng)兩種機(jī)械結(jié)構(gòu)(PRP、PPR)跟兩個(gè)坐標(biāo)系方向(XYY、XXY),可以實(shí)現(xiàn)單軸直線運(yùn)動(dòng)、兩軸線性插補(bǔ)、兩軸圓弧插補(bǔ)、空間圓弧等復(fù)雜運(yùn)動(dòng)。
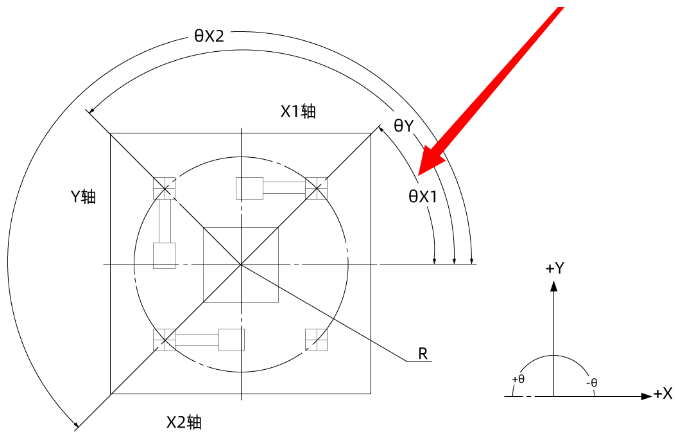
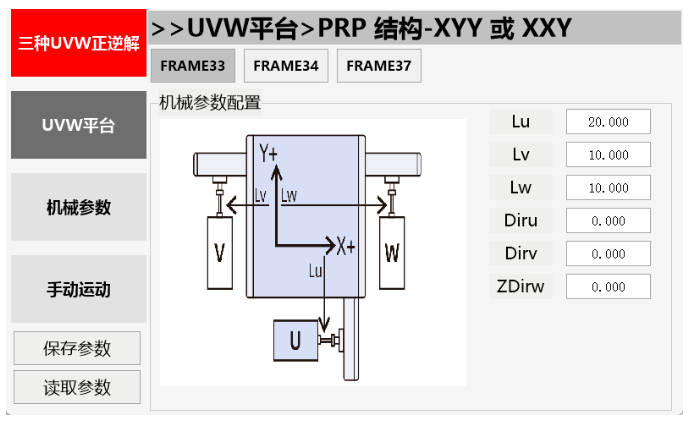
一、FRAME33-UVW對(duì)位平臺(tái)(PRP結(jié)構(gòu)-XYY或XXY)
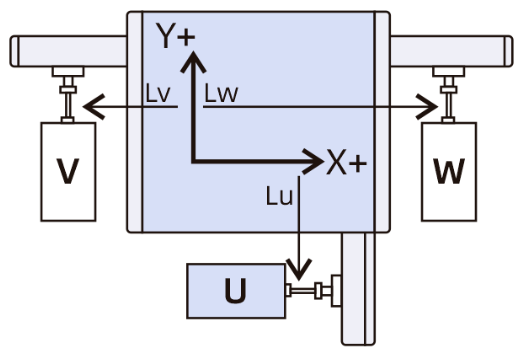
原理:通過(guò)安裝于同一平面的三個(gè)驅(qū)動(dòng)軸的運(yùn)動(dòng),實(shí)現(xiàn)定位要求(以下圖示均以平臺(tái)回零后的初始位置為基準(zhǔn))。
A、電機(jī)方向及角度范圍
虛擬的XY滿足右手法則,角度正向與虛擬XY滿足右手法則,實(shí)際電機(jī)軸方向無(wú)要求,根據(jù)實(shí)際情況填寫(xiě)結(jié)構(gòu)參數(shù)即可。
B、TABLE寄存器依次存入機(jī)械手結(jié)構(gòu)參數(shù)
建立機(jī)械手連接時(shí),需要將機(jī)械結(jié)構(gòu)參數(shù)按照如下次序依次填寫(xiě)到TABLE數(shù)組中。FRAME33模型機(jī)械結(jié)構(gòu)參數(shù)說(shuō)明如下。
| TABLE(Tablenum,lu,lv,lw, angleonecircle,dirx,diry1,diry2) | |
| Tablenum | 存儲(chǔ)轉(zhuǎn)換參數(shù)的TABLE位置 |
| lu | U軸的距離參數(shù),填寫(xiě)正值,零點(diǎn)到U軸的垂直距離 |
| lv | V軸的距離參數(shù),填寫(xiě)正值,零點(diǎn)到V軸的垂直距離 |
| lw | W軸的距離參數(shù),填寫(xiě)正值,零點(diǎn)到W軸的垂直距離 |
| angleonecircle | 虛擬旋轉(zhuǎn)軸一圈脈沖數(shù),任意值 |
| diru | U軸的方向,0-與虛擬X正向一致,1反向 |
| dirv | V軸的方向,0-與虛擬Y正向一致,1反向 |
| zdirw | W軸的方向,0-與虛擬Y正向一致,1反向 |
從TableNum編號(hào)開(kāi)始依次機(jī)械手結(jié)構(gòu)參數(shù)U軸的距離參數(shù),V軸的距離參數(shù),W軸的距離參數(shù),虛擬旋轉(zhuǎn)軸一圈脈沖數(shù),U軸的方向,V軸的方向,W軸的方向到Table中。
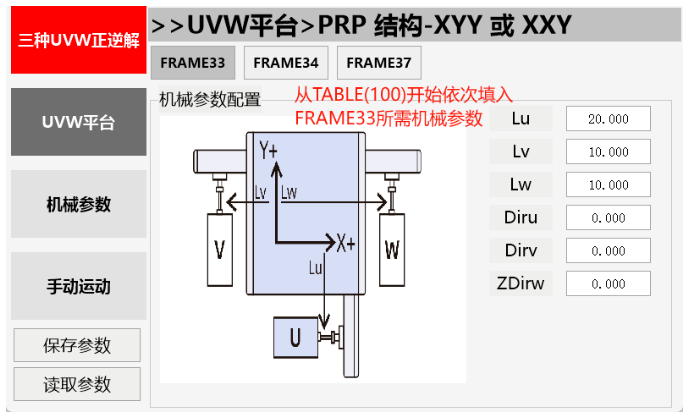
TABLE(TableNum,lu,lv,lw,angleonecircle,diru,dirv,zdirw)。例程從TABLE(100)開(kāi)始依次填入Frame所需機(jī)械參數(shù)。
C、設(shè)置關(guān)節(jié)軸參數(shù)及虛擬軸參數(shù)
各軸的軸類型和脈沖當(dāng)量(units)要設(shè)置正確,設(shè)置為電機(jī)走1mm需要的脈沖數(shù)。虛擬軸的units跟實(shí)際發(fā)送脈沖數(shù)無(wú)關(guān),用于設(shè)置運(yùn)動(dòng)精度,虛擬軸的脈沖當(dāng)量一般設(shè)置為1000,表示精度為小數(shù)點(diǎn)后3位。


D、確定機(jī)械手零點(diǎn)位置
FRAME33需要保證VW軸是水平的。平臺(tái)上任意一點(diǎn)可作為零點(diǎn),保證結(jié)構(gòu)參數(shù)正確即可。
E、建立機(jī)械手正逆解
正解建立:以FRAME33模型為例。先將機(jī)械手結(jié)構(gòu)參數(shù)從某個(gè)Table起始編號(hào)依次存儲(chǔ)到Table數(shù)組中,然后選擇對(duì)應(yīng)模型的軸列表,使用CONNREFRAME指令建立正解模式。指令說(shuō)明可通過(guò)Rtsys軟件菜單欄的【常用】-【幫助文檔】-【RTBasic幫助】-【索引】,在查找欄搜索CONNREFRAME即可查看。
'將機(jī)械手參數(shù)從編號(hào)TableNum開(kāi)始依次存儲(chǔ)到Table數(shù)組中 TABLE(TableNum,lu,lv,lw,angleonecircle,diru,dirv,zdirw) '選擇軸列表 BASE(Viraxis_x, Viraxis_y,Viraxis_v) '建立機(jī)械手正解 CONNREFRAME(33,tablenum, Axis_a,Axis_b,Axis_c)

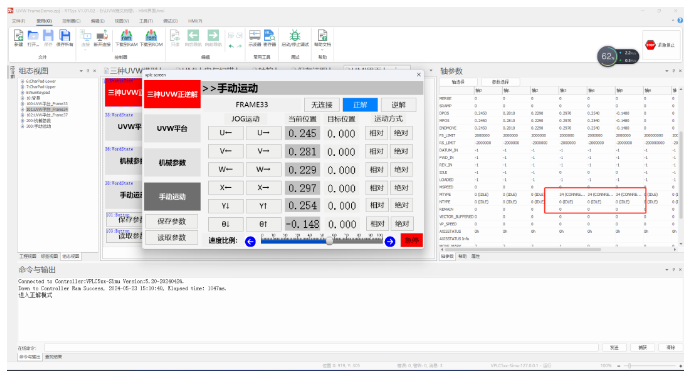
若機(jī)械手正解建立成功,虛擬軸MTYPE(當(dāng)前運(yùn)動(dòng)類型)將顯示為34,此時(shí)只能操作關(guān)節(jié)軸在關(guān)節(jié)坐標(biāo)系中調(diào)整機(jī)械手姿態(tài),手動(dòng)運(yùn)動(dòng)可通過(guò)RTSys軟件菜單欄的【工具】-【手動(dòng)運(yùn)動(dòng)】,待【手動(dòng)運(yùn)動(dòng)】界面彈出之后選擇關(guān)節(jié)軸軸編號(hào)(本文關(guān)節(jié)軸以軸0(U軸),軸1(V軸),軸2(W軸))然后根據(jù)實(shí)際需求選擇點(diǎn)動(dòng)或者寸動(dòng)。虛擬軸會(huì)自動(dòng)計(jì)算末端工作點(diǎn)位于直角坐標(biāo)系中的位置。
逆解建立:以Frame33模型為例。先將機(jī)械手結(jié)構(gòu)參數(shù)從某個(gè)Table起始編號(hào)依次存儲(chǔ)到Table數(shù)組中,然后選擇對(duì)應(yīng)模型的軸列表,使用CONNFRAME指令建立正解模式。指令說(shuō)明可通過(guò)Rtsys軟件工具欄的【常用】-【幫助文檔】-【RTBasic幫助】-【索引】,在查找欄搜索CONNFRAME查看。
'將機(jī)械手參數(shù)從編號(hào)TableNum開(kāi)始依次存儲(chǔ)到Table數(shù)組中 TABLE(TableNum,lu,lv,lw,angleonecircle,diru,dirv,zdirw) '選擇軸列表 BASE(Axis_a,Axis_b,Axis_c) '建立機(jī)械手逆解 CONNFRAME(33,tablenum, Viraxis_x, Viraxis_y,Viraxis_v)

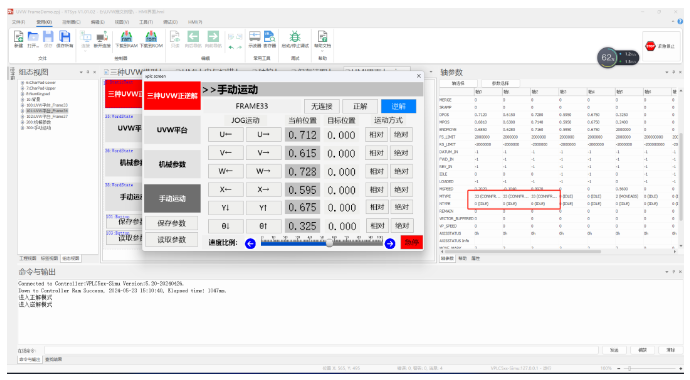
若機(jī)械手逆解建立成功,關(guān)節(jié)軸MTYPE(當(dāng)前運(yùn)動(dòng)類型)將顯示為33,【手動(dòng)運(yùn)動(dòng)】界面操作虛擬軸方法同上。此時(shí)加工工藝指令只能操作虛擬軸,事先編輯好運(yùn)動(dòng)的軌跡在直角坐標(biāo)系中運(yùn)動(dòng)(本文虛擬軸以軸3,軸4,軸5為例),關(guān)節(jié)軸會(huì)自動(dòng)計(jì)算在關(guān)節(jié)坐標(biāo)系中如何聯(lián)合運(yùn)動(dòng)。
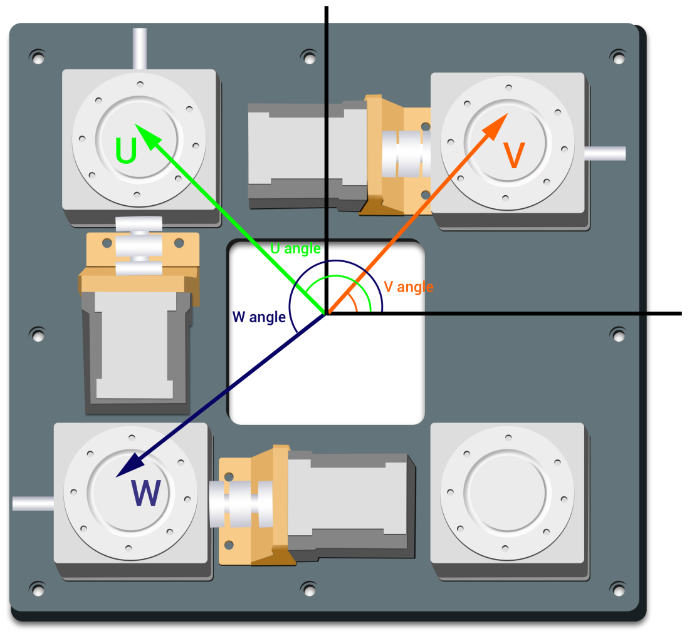
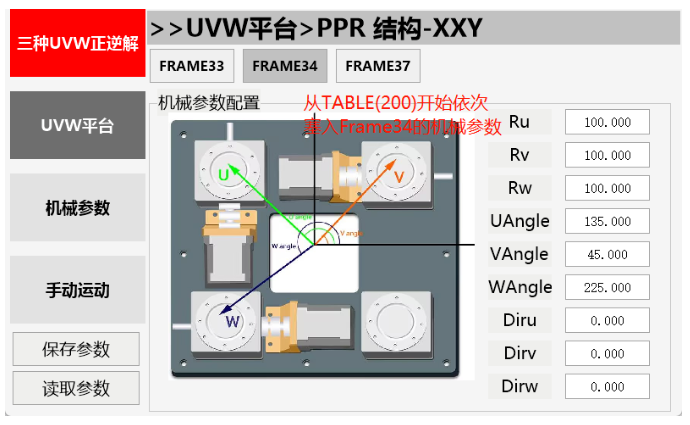
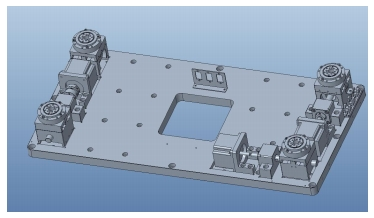
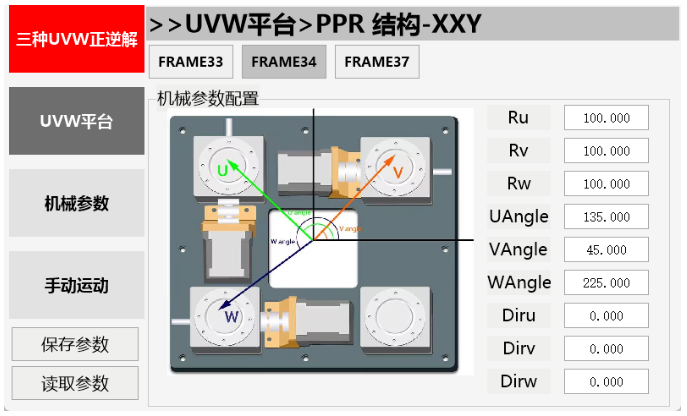
二、FRAME34-UVW對(duì)位平臺(tái)(PPR結(jié)構(gòu)-XXY)
結(jié)構(gòu)示意圖
A、電機(jī)方向及角度范圍
虛擬的XY滿足右手法則,角度正向與虛擬XY滿足右手法則,實(shí)際電機(jī)軸方向無(wú)要求,根據(jù)實(shí)際情況填寫(xiě)結(jié)構(gòu)參數(shù)即可。
B、TABLE寄存器依次存入機(jī)械手結(jié)構(gòu)參數(shù)
建立機(jī)械手連接時(shí),需要將機(jī)械結(jié)構(gòu)參數(shù)按照如下次序依次填寫(xiě)到TABLE數(shù)組中。FRAME34模型機(jī)械結(jié)構(gòu)參數(shù)說(shuō)明如下。
| TABLE(0,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw) | |
| Tablenum | 存儲(chǔ)轉(zhuǎn)換參數(shù)的TABLE位置 |
| Ru | U軸的距離參數(shù),填寫(xiě)正值,零點(diǎn)到U軸的旋轉(zhuǎn)中心距離 |
| Rv | V軸的距離參數(shù),填寫(xiě)正值,零點(diǎn)到V軸的旋轉(zhuǎn)中心距離 |
| Rw | W軸的距離參數(shù),填寫(xiě)正值,零點(diǎn)到W軸的旋轉(zhuǎn)中心距離 |
| Uangle | U軸零點(diǎn)時(shí)和x軸角度,單位度 |
| Vangle | V軸零點(diǎn)時(shí)和x軸角度,單位度 |
| Wangle | W軸零點(diǎn)時(shí)和x軸角度,單位度 |
| angleonecircle | 虛擬旋轉(zhuǎn)軸一圈脈沖數(shù),任意值 |
| diru | U軸的方向,0-與虛擬Y正向一致,1反向 |
| dirv | V軸的方向,0-與虛擬X正向一致,1反向 |
| dirw | W軸的方向,0-與虛擬X正向一致,1反向 |
從TableNum編號(hào)開(kāi)始依次機(jī)械手結(jié)構(gòu)參數(shù)U軸的距離參數(shù),V軸的距離參數(shù),W軸的距離參數(shù),U軸零點(diǎn)時(shí)和X軸的角度,V軸零點(diǎn)時(shí)和X軸的角度,W軸零點(diǎn)時(shí)和X軸的角度,虛擬旋轉(zhuǎn)軸一圈脈沖數(shù),U軸的方向,V軸的方向,W軸的方向到Table中。
TABLE(TableNum,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw)
C、設(shè)置關(guān)節(jié)軸參數(shù)及虛擬軸參數(shù)
各軸的軸類型和脈沖當(dāng)量(units)要設(shè)置正確,設(shè)置為電機(jī)走1°需要的脈沖數(shù)。虛擬軸的units跟實(shí)際發(fā)送脈沖數(shù)無(wú)關(guān),用于設(shè)置運(yùn)動(dòng)精度,虛擬軸的脈沖當(dāng)量一般設(shè)置為1000,表示精度為小數(shù)點(diǎn)后3位。
D、確定機(jī)械手零點(diǎn)位置
FRAME34保證VW軸是水平的,并平行X軸,U平行Y軸。平臺(tái)上任意一點(diǎn)可作為零點(diǎn),保證結(jié)構(gòu)參數(shù)正確即可。
E、建立機(jī)械手正逆解
正解建立:以FRAME34模型為例。先將機(jī)械手結(jié)構(gòu)參數(shù)從某個(gè)Table起始編號(hào)依次存儲(chǔ)到Table數(shù)組中,然后選擇對(duì)應(yīng)模型的軸列表,使用CONNREFRAME指令建立正解模式。指令說(shuō)明可通過(guò)Rtsys軟件菜單欄的【常用】-【幫助文檔】-【RTBasic幫助】-【索引】,在查找欄搜索CONNREFRAME即可查看。
'將機(jī)械手參數(shù)從編號(hào)TableNum開(kāi)始依次存儲(chǔ)到Table數(shù)組中 TABLE(TableNum,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw) '選擇軸列表 BASE(Viraxis_x, Viraxis_y,Viraxis_v) '建立機(jī)械手正解 CONNREFRAME(34,tablenum, Axis_a,Axis_b,Axis_c)

若機(jī)械手正解建立成功,虛擬軸MTYPE(當(dāng)前運(yùn)動(dòng)類型)將顯示為34,此時(shí)只能操作關(guān)節(jié)軸在關(guān)節(jié)坐標(biāo)系中調(diào)整機(jī)械手姿態(tài),手動(dòng)運(yùn)動(dòng)可通過(guò)RTSys軟件菜單欄的【工具】-【手動(dòng)運(yùn)動(dòng)】,待【手動(dòng)運(yùn)動(dòng)】界面彈出之后選擇關(guān)節(jié)軸軸編號(hào)(本文關(guān)節(jié)軸以軸0(U軸),軸1(V軸),軸2(W軸))然后根據(jù)實(shí)際需求選擇點(diǎn)動(dòng)或者寸動(dòng)。虛擬軸會(huì)自動(dòng)計(jì)算末端工作點(diǎn)位于直角坐標(biāo)系中的位置。
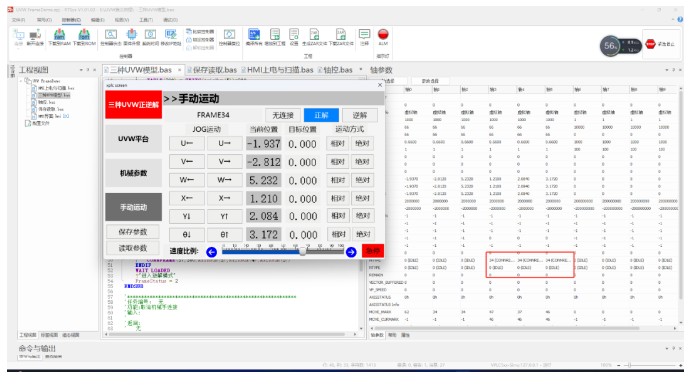
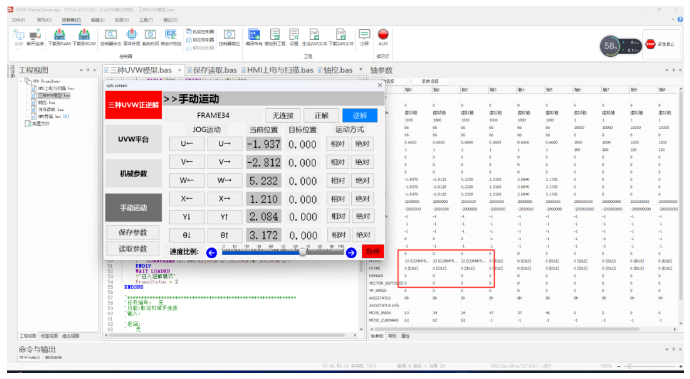
逆解建立:以FRAME34模型為例。先將機(jī)械手結(jié)構(gòu)參數(shù)從某個(gè)Table起始編號(hào)依次存儲(chǔ)到Table數(shù)組中,然后選擇對(duì)應(yīng)模型的軸列表,使用CONNFRAME指令建立正解模式。指令說(shuō)明可通過(guò)RTSys軟件工具欄的【常用】-【幫助文檔】-【RTBasic幫助】-【索引】,在查找欄搜索CONNFRAME查看。
'將機(jī)械手參數(shù)從編號(hào)TableNum開(kāi)始依次存儲(chǔ)到Table數(shù)組中 TABLE(TableNum,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw)'選擇軸列表 BASE(Axis_a,Axis_b,Axis_c) '建立機(jī)械手逆解 CONNFRAME(34,tablenum, Viraxis_x, Viraxis_y,Viraxis_v)

若機(jī)械手逆解建立成功,關(guān)節(jié)軸MTYPE(當(dāng)前運(yùn)動(dòng)類型)將顯示為33,【手動(dòng)運(yùn)動(dòng)】界面操作虛擬軸方法同上。此時(shí)加工工藝指令只能操作虛擬軸,事先編輯好運(yùn)動(dòng)的軌跡在直角坐標(biāo)系中運(yùn)動(dòng)(本文虛擬軸以軸3,軸4,軸5為例),關(guān)節(jié)軸會(huì)自動(dòng)計(jì)算在關(guān)節(jié)坐標(biāo)系中如何聯(lián)合運(yùn)動(dòng)。
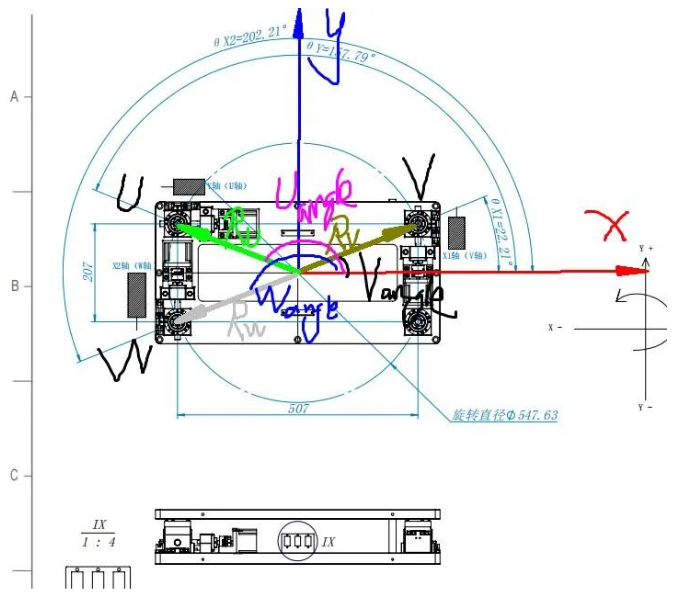
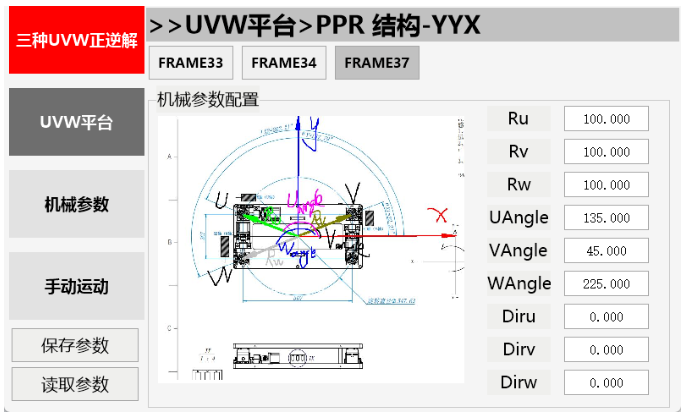
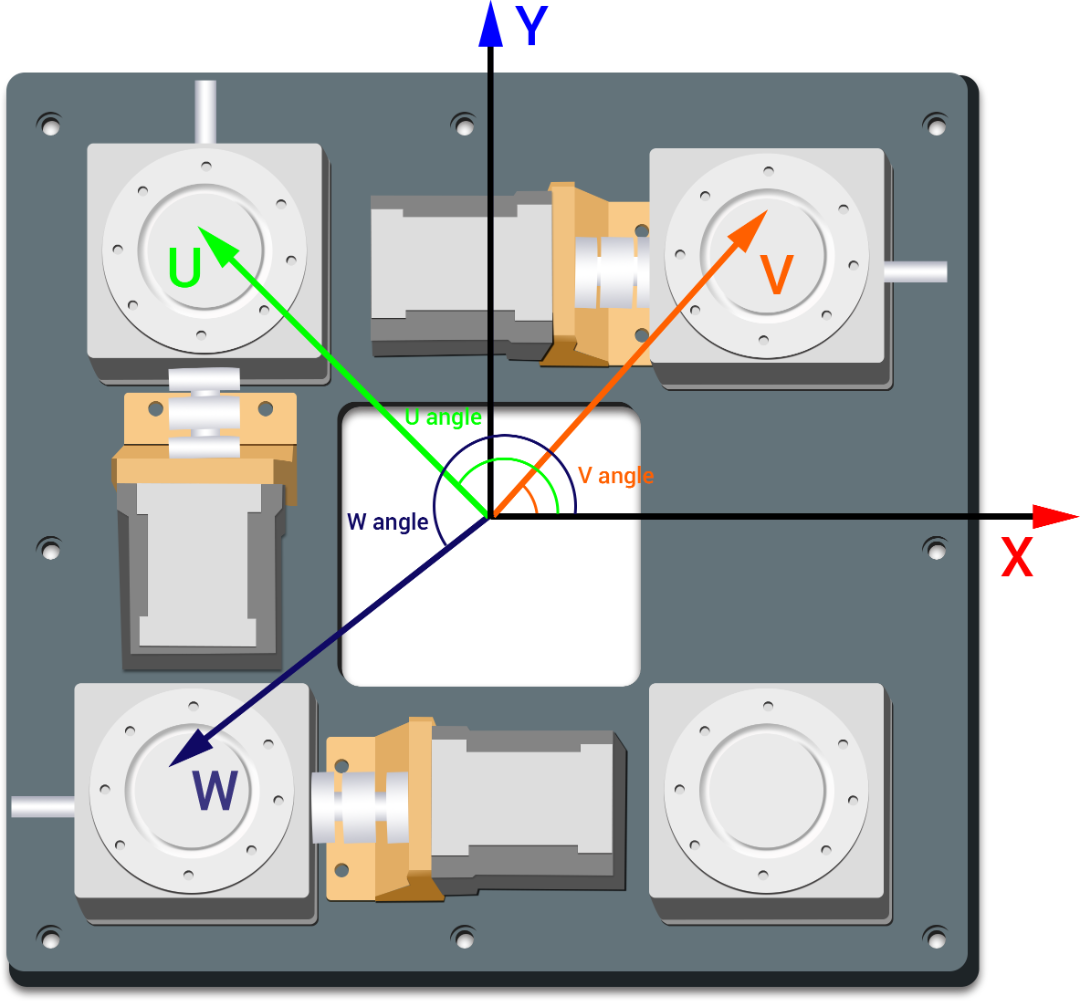
三、FRAME37-UVW對(duì)位平臺(tái)(PPR結(jié)構(gòu)-YYX)
A、電機(jī)方向及角度范圍
虛擬的XY滿足右手法則,角度正向與虛擬XY滿足右手法則,實(shí)際電機(jī)軸方向無(wú)要求,根據(jù)實(shí)際情況填寫(xiě)結(jié)構(gòu)參數(shù)即可。
B、TABLE寄存器依次存入機(jī)械手結(jié)構(gòu)參數(shù)
建立機(jī)械手連接時(shí),需要將機(jī)械結(jié)構(gòu)參數(shù)按照如下次序依次填寫(xiě)到TABLE數(shù)組中。FRAME37模型機(jī)械結(jié)構(gòu)參數(shù)說(shuō)明如下。
| TABLE(0,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw) | |
| Tablenum | 存儲(chǔ)轉(zhuǎn)換參數(shù)的TABLE位置 |
| Ru | U軸的距離參數(shù),填寫(xiě)正值,零點(diǎn)到U軸的旋轉(zhuǎn)中心距離 |
| Rv | V軸的距離參數(shù),填寫(xiě)正值,零點(diǎn)到V軸的旋轉(zhuǎn)中心距離 |
| Rw | W軸的距離參數(shù),填寫(xiě)正值,零點(diǎn)到W軸的旋轉(zhuǎn)中心距離 |
| Uangle | U軸零點(diǎn)時(shí)和x軸角度,單位度 |
| Vangle | V軸零點(diǎn)時(shí)和x軸角度,單位度 |
| Wangle | W軸零點(diǎn)時(shí)和x軸角度,單位度 |
| angleonecircle | 虛擬旋轉(zhuǎn)軸一圈脈沖數(shù),任意值 |
| diru | U軸的方向,0-與虛擬Y正向一致,1反向 |
| dirv | V軸的方向,0-與虛擬X正向一致,1反向 |
| dirw | W軸的方向,0-與虛擬X正向一致,1反向 |
從TableNum編號(hào)開(kāi)始依次機(jī)械手結(jié)構(gòu)參數(shù)U軸的距離參數(shù),V軸的距離參數(shù),W軸的距離參數(shù),U軸零點(diǎn)時(shí)和X軸的角度,V軸零點(diǎn)時(shí)和X軸的角度,W軸零點(diǎn)時(shí)和X軸的角度,虛擬旋轉(zhuǎn)軸一圈脈沖數(shù),U軸的方向,V軸的方向,W軸的方向到Table中。
TABLE(TableNum,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw)。
C、設(shè)置關(guān)節(jié)軸參數(shù)及虛擬軸參數(shù)
各軸的軸類型和脈沖當(dāng)量(units)要設(shè)置正確,設(shè)置為電機(jī)走1°需要的脈沖數(shù)。虛擬軸的units跟實(shí)際發(fā)送脈沖數(shù)無(wú)關(guān),用于設(shè)置運(yùn)動(dòng)精度,虛擬軸的脈沖當(dāng)量一般設(shè)置為1000,表示精度為小數(shù)點(diǎn)后3位。
D、確定機(jī)械手零點(diǎn)位置
FRAME37保證VW軸是水平的,并平行X軸,U平行Y軸。平臺(tái)上任意一點(diǎn)可作為零點(diǎn),保證結(jié)構(gòu)參數(shù)正確即可。
E、建立機(jī)械手正逆解正解建立:
以FRAME37模型為例。先將機(jī)械手結(jié)構(gòu)參數(shù)從某個(gè)Table起始編號(hào)依次存儲(chǔ)到Table數(shù)組中,然后選擇對(duì)應(yīng)模型的軸列表,使用CONNREFRAME指令建立正解模式。指令說(shuō)明可通過(guò)RTSys軟件菜單欄的【常用】-【幫助文檔】-【RTBasic幫助】-【索引】,在查找欄搜索CONNREFRAME即可查看。
'將機(jī)械手參數(shù)從編號(hào)TableNum開(kāi)始依次存儲(chǔ)到Table數(shù)組中 TABLE(TableNum,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw) '選擇軸列表 BASE(Viraxis_x, Viraxis_y,Viraxis_v) '建立機(jī)械手正解 CONNREFRAME(37,tablenum, Axis_a,Axis_b,Axis_c)

若機(jī)械手正解建立成功,虛擬軸MTYPE(當(dāng)前運(yùn)動(dòng)類型)將顯示為34,此時(shí)只能操作關(guān)節(jié)軸在關(guān)節(jié)坐標(biāo)系中調(diào)整機(jī)械手姿態(tài),手動(dòng)運(yùn)動(dòng)可通過(guò)RTSys軟件菜單欄的【工具】-【手動(dòng)運(yùn)動(dòng)】,待【手動(dòng)運(yùn)動(dòng)】界面彈出之后選擇關(guān)節(jié)軸軸編號(hào)(本文關(guān)節(jié)軸以軸0(U軸),軸1(V軸),軸2(W軸))然后根據(jù)實(shí)際需求選擇點(diǎn)動(dòng)或者寸動(dòng)。虛擬軸會(huì)自動(dòng)計(jì)算末端工作點(diǎn)位于直角坐標(biāo)系中的位置。
逆解建立:以FRAME37模型為例。先將機(jī)械手結(jié)構(gòu)參數(shù)從某個(gè)Table起始編號(hào)依次存儲(chǔ)到Table數(shù)組中,然后選擇對(duì)應(yīng)模型的軸列表,使用CONNFRAME指令建立正解模式。指令說(shuō)明可通過(guò)RTSys軟件工具欄的【常用】-【幫助文檔】-【RTBasic幫助】-【索引】,在查找欄搜索CONNFRAME查看。
'將機(jī)械手參數(shù)從編號(hào)TableNum開(kāi)始依次存儲(chǔ)到Table數(shù)組中 TABLE(TableNum,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw)'選擇軸列表 BASE(Axis_a,Axis_b,Axis_c) '建立機(jī)械手逆解 CONNFRAME(37,tablenum, Viraxis_x, Viraxis_y,Viraxis_v)

若機(jī)械手逆解建立成功,關(guān)節(jié)軸MTYPE(當(dāng)前運(yùn)動(dòng)類型)將顯示為33,【手動(dòng)運(yùn)動(dòng)】界面操作虛擬軸方法同上。此時(shí)加工工藝指令只能操作虛擬軸,事先編輯好運(yùn)動(dòng)的軌跡在直角坐標(biāo)系中運(yùn)動(dòng)(本文虛擬軸以軸3,軸4,軸5為例),關(guān)節(jié)軸會(huì)自動(dòng)計(jì)算在關(guān)節(jié)坐標(biāo)系中如何聯(lián)合運(yùn)動(dòng)。
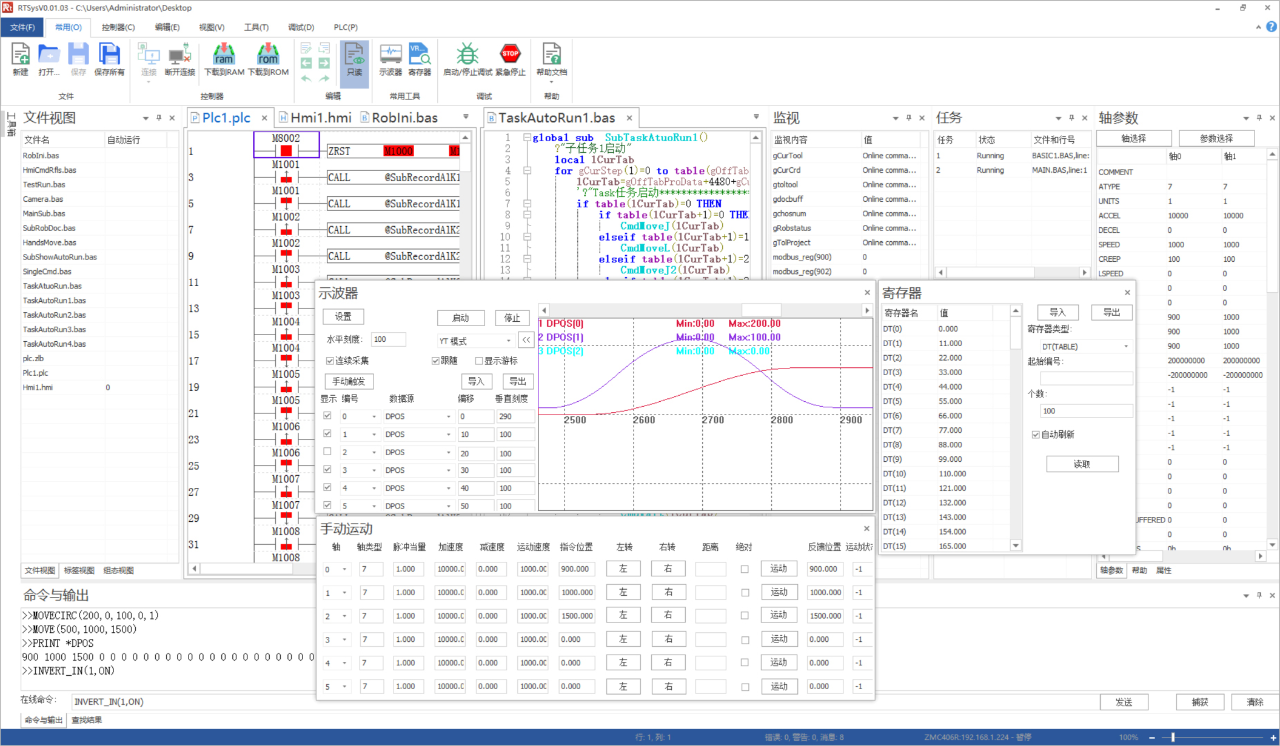
??? 例程演示
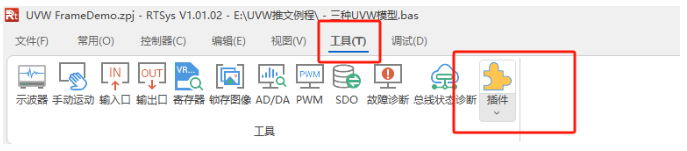
RTSys軟件支持Basic,HMI與PLC混合編程,本例程采用Basic結(jié)合HMI界面混合編程進(jìn)行演示。可通過(guò)RTSys軟件菜單欄的【HMI】-【工具箱】,選擇空間進(jìn)行拖拉擺放,設(shè)計(jì)交互界面。
1、將程序下載到控制器運(yùn)行,先后點(diǎn)擊RTSys軟件菜單欄的【工具】-【插件】-【XPLC SCREEN】。
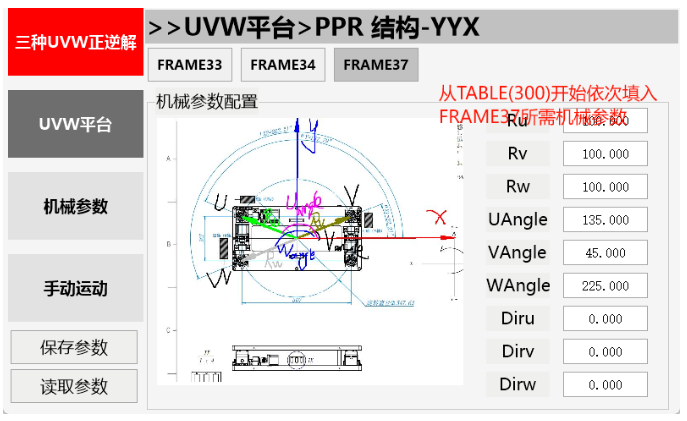
2、待交互界面彈出后點(diǎn)擊“UVW平臺(tái)”按鈕,根據(jù)實(shí)際硬件選擇對(duì)應(yīng)UVW類型和配置對(duì)應(yīng)機(jī)械參數(shù)。
3、選擇完UVW平臺(tái)類型和設(shè)置好機(jī)械參數(shù)后,點(diǎn)擊“機(jī)械參數(shù)”按鈕進(jìn)行軸參數(shù)配置。

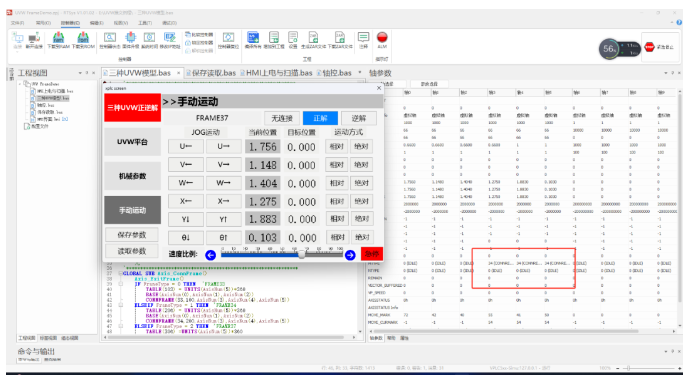
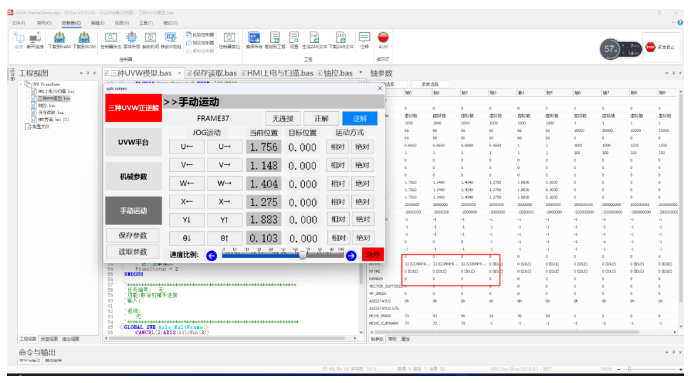
4、設(shè)置好UVW平臺(tái)和軸參數(shù)后,點(diǎn)擊“手動(dòng)運(yùn)動(dòng)”進(jìn)行正逆解切換,和操作對(duì)應(yīng)軸進(jìn)行運(yùn)動(dòng)。
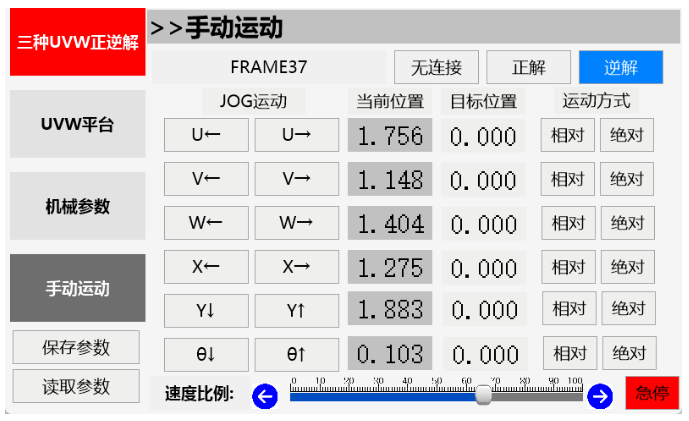
本次,正運(yùn)動(dòng)技術(shù)EtherCAT運(yùn)動(dòng)控制器在UVW對(duì)位平臺(tái)中的應(yīng)用,就分享到這里。
更多精彩內(nèi)容請(qǐng)關(guān)注“正運(yùn)動(dòng)小助手”公眾號(hào),需要相關(guān)開(kāi)發(fā)環(huán)境與例程代碼,請(qǐng)咨詢正運(yùn)動(dòng)技術(shù)銷(xiāo)售工程師。
本文由正運(yùn)動(dòng)技術(shù)原創(chuàng),歡迎大家轉(zhuǎn)載,共同學(xué)習(xí),一起提高中國(guó)智能制造水平。文章版權(quán)歸正運(yùn)動(dòng)技術(shù)所有,如有轉(zhuǎn)載請(qǐng)注明文章來(lái)源。
審核編輯 黃宇
-
接口
+關(guān)注
關(guān)注
33文章
8575瀏覽量
151016 -
運(yùn)動(dòng)控制器
+關(guān)注
關(guān)注
2文章
401瀏覽量
24704 -
ethercat
+關(guān)注
關(guān)注
18文章
686瀏覽量
38673
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
EtherCAT運(yùn)動(dòng)控制器在ROS上的應(yīng)用(上)

EtherCAT運(yùn)動(dòng)控制器在ROS上的應(yīng)用開(kāi)發(fā)案例(上)

EtherCAT運(yùn)動(dòng)控制器在UVW對(duì)位平臺(tái)中的應(yīng)用# 正運(yùn)動(dòng)技術(shù)# 運(yùn)動(dòng)控制器# 運(yùn)動(dòng)控制卡# UVW對(duì)位平臺(tái)
EtherCAT總線運(yùn)動(dòng)控制器硬件是如何進(jìn)行接線的?
正運(yùn)動(dòng)技術(shù)運(yùn)動(dòng)控制器EtherCAT總線快速入門(mén)
正運(yùn)動(dòng)技術(shù)運(yùn)動(dòng)控制器EtherCAT總線的基礎(chǔ)使用
經(jīng)濟(jì)型EtherCAT運(yùn)動(dòng)控制器:EtherCAT總線快速入門(mén)
EtherCAT運(yùn)動(dòng)控制器進(jìn)行自定義API封裝例程
EtherCAT總線運(yùn)動(dòng)控制器應(yīng)用進(jìn)階一

EtherCAT運(yùn)動(dòng)控制器在ROS上的應(yīng)用(下)
EtherCAT運(yùn)動(dòng)控制器在LabVIEW中的運(yùn)動(dòng)控制與實(shí)時(shí)數(shù)據(jù)采集

EtherCAT運(yùn)動(dòng)控制器與PLC的區(qū)別
BissC絕對(duì)值編碼器在EtherCAT運(yùn)動(dòng)控制器中的應(yīng)用
基于VPLC7機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)的UVW視覺(jué)對(duì)位解決方案
SSI絕對(duì)值編碼器在EtherCAT運(yùn)動(dòng)控制器中的應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論