 PLC怎么控制伺服驅動器
PLC怎么控制伺服驅動器
一、引言
在現代工業自動化領域,PLC(可編程邏輯控制器)與伺服驅動器的結合應用已經成為提高生產效率、保證產品質量的重要手段。伺服驅動器以其高精度、高響應速度的特性,在機床加工、包裝機械、機器人控制等領域得到了廣泛應用。本文將詳細闡述PLC如何控制伺服驅動器,包括控制原理、控制方式、實現步驟以及注意事項等方面,以期為讀者提供全面的技術參考。
二、PLC控制伺服驅動器的基本原理
PLC控制伺服驅動器的基本原理是通過編寫相應的控制程序,向伺服驅動器發送控制信號,從而實現對伺服電機的精確控制。具體來說,PLC通過接收外部輸入信號(如按鈕、傳感器等),根據預設的控制邏輯,輸出相應的控制信號給伺服驅動器,伺服驅動器再根據這些信號控制伺服電機的運行,如位置、速度、加速度等。
三、PLC控制伺服驅動器的主要方式
PLC控制伺服驅動器的方式主要有三種:轉矩控制、位置控制和速度控制。
轉矩控制
轉矩控制方式是通過外部模擬量的輸入或直接的地址賦值來設定電機軸對外的輸出轉矩的大小。具體來說,PLC可以通過模擬量輸出模塊向伺服驅動器發送轉矩設定值,伺服驅動器根據這個設定值控制伺服電機的輸出轉矩。轉矩控制方式適用于需要精確控制輸出轉矩的場合,如材料處理、張力控制等。
位置控制
位置控制模式一般是通過外部輸入的脈沖的頻率來確定轉動速度的大小,通過脈沖的個數來確定轉動的角度。PLC可以通過高速脈沖輸出模塊向伺服驅動器發送脈沖信號,伺服驅動器根據這些信號控制伺服電機的位置和速度。位置控制模式適用于需要精確定位和速度控制的場合,如機床加工、機器人控制等。
速度控制
速度控制模式是通過模擬量的輸入或脈沖的頻率來進行轉動速度的控制。PLC可以通過模擬量輸出模塊或高速脈沖輸出模塊向伺服驅動器發送速度設定值,伺服驅動器根據這個設定值控制伺服電機的運行速度。速度控制模式適用于需要連續速度調節的場合,如輸送帶、攪拌機等。
四、PLC控制伺服驅動器的實現步驟
確定控制需求
首先,需要明確需要控制的伺服驅動器的具體需求,如位置、速度、加速度等。這是選擇合適的PLC和伺服驅動器的基礎。
選擇合適的PLC和伺服驅動器
根據控制需求選擇合適的PLC和伺服驅動器,確保設備之間的兼容性和性能匹配。
編寫PLC控制程序
根據控制需求和硬件設備編寫PLC控制程序。程序需要包括輸入信號處理、控制邏輯判斷、輸出信號控制等內容。同時,還需要根據伺服驅動器的通信協議和控制方式,編寫相應的通信和控制指令。
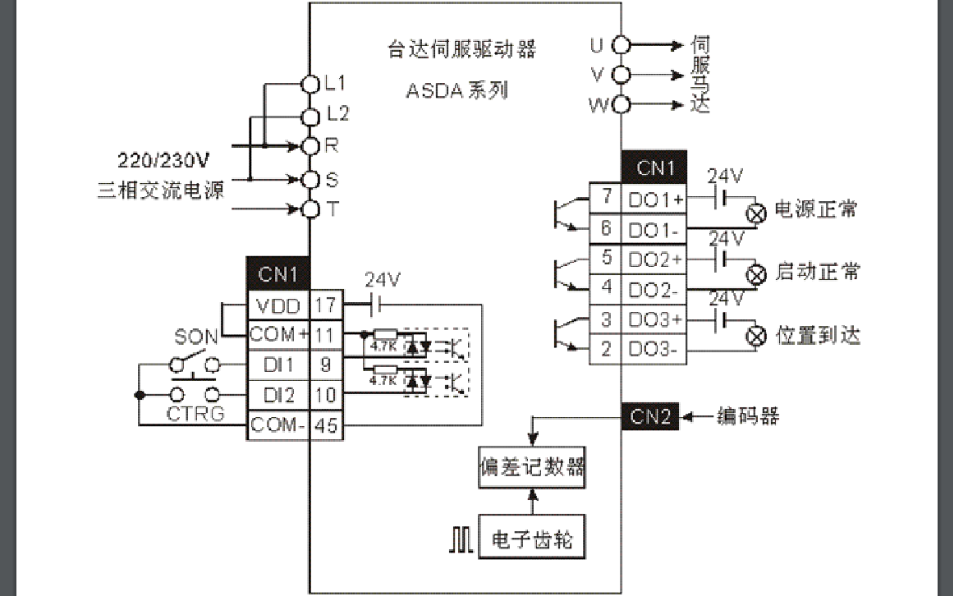
搭建硬件連接
根據PLC和伺服驅動器的連接方式和通信協議,搭建硬件連接。這包括電源連接、信號線連接、通信線連接等。
調試和測試
在搭建好硬件連接后,需要對PLC控制程序進行調試和測試。通過模擬輸入信號或實際運行測試,驗證控制程序的正確性和可靠性。同時,還需要對伺服驅動器的運行狀態進行監測和調整,確保伺服電機的精確控制。
五、注意事項
在選擇PLC和伺服驅動器時,需要考慮設備之間的兼容性和性能匹配,以確保系統的穩定性和可靠性。
在編寫PLC控制程序時,需要充分了解伺服驅動器的通信協議和控制方式,以確保程序的正確性和可靠性。
在搭建硬件連接時,需要遵循相關的安全規范和操作規程,確保操作的安全性和正確性。
在調試和測試過程中,需要充分測試各種可能的情況和異常情況,以確保系統的穩定性和可靠性。
六、結論
PLC控制伺服驅動器是實現工業自動化控制的重要手段之一。通過選擇合適的PLC和伺服驅動器、編寫正確的控制程序、搭建可靠的硬件連接以及進行充分的調試和測試,可以實現對伺服電機的精確控制,提高生產效率和產品質量。
-
機器人
+關注
關注
211文章
28379瀏覽量
206914 -
plc
+關注
關注
5010文章
13271瀏覽量
463055 -
伺服驅動器
+關注
關注
22文章
481瀏覽量
31543
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論