") 伺服電機控制器怎么調參數(shù)
伺服電機控制器怎么調參數(shù)
伺服電機控制器參數(shù)調整是確保伺服系統(tǒng)正常運行和達到預期性能的關鍵步驟。本文將詳細介紹伺服電機控制器的參數(shù)調整方法,包括基本原理、常見參數(shù)、調整步驟和注意事項等。
第一部分:伺服電機控制器參數(shù)調整的基本原理
1. 伺服電機控制器概述
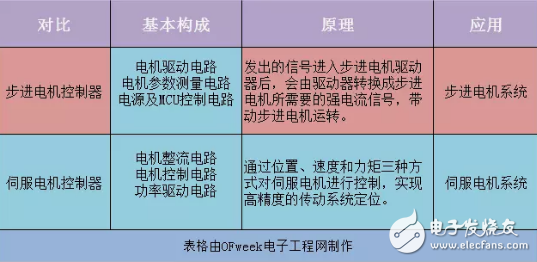
伺服電機控制器是一種高精度、高性能的電機驅動器,它能夠根據(jù)輸入的控制信號精確控制電機的轉速、位置和扭矩。伺服電機控制器廣泛應用于自動化設備、機器人、數(shù)控機床等領域。
2. 參數(shù)調整的重要性
參數(shù)調整是確保伺服電機控制器正常工作和達到預期性能的關鍵。通過調整參數(shù),可以優(yōu)化系統(tǒng)的動態(tài)響應、穩(wěn)定性、精度和效率等性能指標。
3. 參數(shù)調整的基本原則
- 系統(tǒng)性原則 :調整參數(shù)時,需要考慮整個系統(tǒng)的穩(wěn)定性和性能,而不是僅僅關注某個局部。
- 逐步調整原則 :參數(shù)調整應逐步進行,每次調整后都需要觀察系統(tǒng)的反應,以確保調整的正確性。
- 經驗積累原則 :參數(shù)調整需要根據(jù)實際應用場景和經驗進行,不斷積累和優(yōu)化。
第二部分:伺服電機控制器常見參數(shù)及其調整方法
1. 基本參數(shù)
- 增益(Gain) :增益決定了系統(tǒng)的響應速度和穩(wěn)定性。過高的增益可能導致系統(tǒng)振蕩,過低的增益可能導致系統(tǒng)響應過慢。
- 積分時間(Integral Time) :積分時間影響系統(tǒng)的穩(wěn)態(tài)誤差。過長的積分時間可能導致系統(tǒng)響應過慢,過短的積分時間可能導致系統(tǒng)振蕩。
- 微分時間(Derivative Time) :微分時間用于抑制系統(tǒng)的過沖和振蕩。適當?shù)奈⒎謺r間可以提高系統(tǒng)的穩(wěn)定性。
2. 調整步驟
- 初始化 :在調整參數(shù)之前,需要將控制器恢復到出廠設置,以確保調整的準確性。
- 增益調整 :首先調整增益,觀察系統(tǒng)的動態(tài)響應。逐步增加增益,直到系統(tǒng)開始振蕩,然后稍微降低增益,以獲得最佳響應速度和穩(wěn)定性。
- 積分時間調整 :在增益調整完成后,調整積分時間。逐步增加積分時間,直到系統(tǒng)穩(wěn)態(tài)誤差達到可接受的范圍。
- 微分時間調整 :最后調整微分時間。逐步增加微分時間,直到系統(tǒng)的過沖和振蕩得到有效抑制。
3. 注意事項
- 安全第一 :在調整參數(shù)時,務必確保操作人員和設備的安全。
- 備份數(shù)據(jù) :在調整參數(shù)之前,建議備份當前的參數(shù)設置,以便在出現(xiàn)問題時能夠快速恢復。
- 記錄調整過程 :詳細記錄每次調整的參數(shù)值和系統(tǒng)的反應,以便于分析和優(yōu)化。
第三部分:實際應用案例分析
1. 案例背景
假設我們有一個自動化生產線,需要通過調整伺服電機控制器的參數(shù)來提高生產線的運行效率和穩(wěn)定性。
2. 參數(shù)調整過程
- 問題診斷 :首先,我們需要診斷生產線存在的問題,如速度不穩(wěn)定、位置精度不高等。
- 參數(shù)調整 :根據(jù)問題診斷的結果,選擇合適的參數(shù)進行調整。例如,如果速度不穩(wěn)定,可以優(yōu)先調整增益和微分時間。
- 效果評估 :每次調整參數(shù)后,都需要評估調整的效果。如果效果不理想,需要繼續(xù)調整其他參數(shù)或重新調整當前參數(shù)。
- 優(yōu)化迭代 :參數(shù)調整是一個迭代優(yōu)化的過程,需要不斷地調整和優(yōu)化,直到達到預期的性能。
3. 結果分析
通過參數(shù)調整,生產線的運行效率和穩(wěn)定性得到了顯著提高。例如,速度波動范圍減小,位置精度提高,設備故障率降低等。
伺服電機控制器參數(shù)調整是一個復雜且細致的過程,需要根據(jù)實際應用場景和經驗進行。通過合理的參數(shù)調整,可以顯著提高伺服系統(tǒng)的動態(tài)響應、穩(wěn)定性、精度和效率等性能指標。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
控制器
+關注
關注
112文章
16332瀏覽量
177808 -
參數(shù)
+關注
關注
11文章
1829瀏覽量
32195 -
伺服電機
+關注
關注
85文章
2044瀏覽量
57809 -
伺服系統(tǒng)
+關注
關注
14文章
572瀏覽量
39205
發(fā)布評論請先 登錄
相關推薦
伺服電機工作原理_伺服電機主要參數(shù)
伺服電機是一種能夠通過精確控制電機轉速、位置和加速度等參數(shù)來實現(xiàn)高精度運動控制的
發(fā)表于 03-07 14:46
?4188次閱讀
伺服控制器的作用_伺服控制器和變頻器的區(qū)別
伺服控制器是一種用于控制電機運動的高精度電子設備,主要作用是精確控制電機的位置、速度和加速度等運
發(fā)表于 03-09 09:52
?3294次閱讀
伺服控制器的參數(shù)設置_伺服控制器報警代碼
伺服控制器的參數(shù)設置涉及到多個方面,包括電氣參數(shù)、控制參數(shù)、運動
發(fā)表于 03-12 11:26
?8070次閱讀
伺服控制器怎么調_伺服控制器和伺服驅動器的區(qū)別
伺服控制器的調試需要根據(jù)具體應用場景和控制器型號進行具體設置和調整。一般來說,伺服控制器的調試包括以下幾個方面:
電氣
發(fā)表于 03-12 11:31
?3052次閱讀

伺服電機驅動器設置參數(shù)教程
伺服電機驅動器是現(xiàn)代工業(yè)控制領域中廣泛應用的一種設備。通過合理設置參數(shù),可以實現(xiàn)電機的高精度定位
匯川伺服電機抖動調什么參數(shù)
匯川伺服電機抖動問題是一個常見的問題,它可能是由多種原因引起的。在解決這個問題時,我們需要對伺服電機的參數(shù)進行調整。 一、





 工商網監(jiān)
工商網監(jiān)
評論