


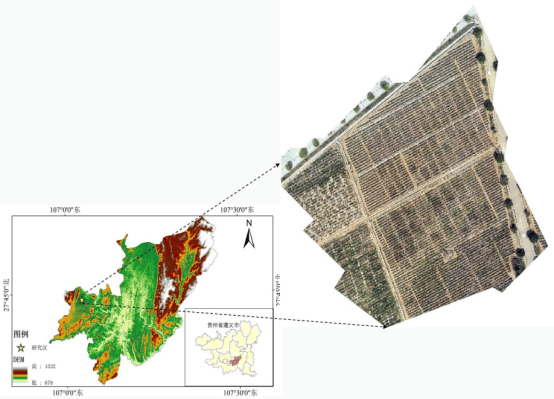
四、基于機載高光譜山區耕地土壤有機質含量反演算法研究
4.1敏感波段選擇
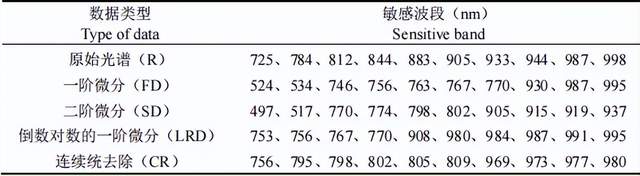
根據無人機高光譜SOM相關系數圖和敏感波段范圍圖分析得出,基于原始光譜和4種光譜變換(一階微分(FD)、二階微分(SD)、倒數對數的一階微分(LRD)和連續統去除(CR))與SOM的相關分析分別有80、20、11、12、10個波段通過顯著檢驗(p>0.01),其中原始光譜顯著相關的波段數量最多,少部分在可見光區,多數集中在近紅外光區,其他四種變換顯著相關的波段均分布在可見光-近紅外區間。5種不同的光譜形式經篩選最終各確定10個相關系數值較大的敏感波段作為建模的自變量,見表4-1。
表 4-1 機載高光譜敏感波段入選表
4.2 基于敏感波段的山區耕地土壤有機質含量反演模型
4.2.1PLSR土壤有機質反演模型
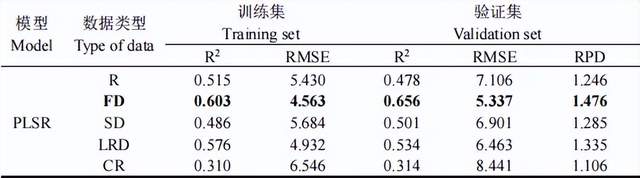
表4-2是山區耕地SOM含量機載高光譜反演的不同光譜變化和PLSR的模型組合,從中可知,所有訓練集的模型精度基本和驗證集持平,這可能跟二者樣本數量相同有密切聯系。分析5種類型光譜與PLSR組合的模型中,FD-PLSR、SD-PLSR、LRD-PLSR等模型的RPD均大于1.4,其中擬合優度表現最為良好的是FD-PLS(R2T=0.603,RMSET=4.563;R2V=0.656,RMSEV=5.337,RPD=1.476),并且驗證集精度高于訓練集,所以FD-PLSR模型能達到預測山區土壤有機質含量的基本要求,而SD和LRD光譜變換模型的決定系數偏低(0.501<0.6,0.534<0.6),不適用于山區耕地SOM反演;基于原始光譜的回歸模型精度較低,即使經過相關分析入選敏感波段的數量最多,但容易造成建模過程中自變量共線問題,一方面跟機載光譜儀掃描波段范圍受限有關,另一方面說明與山區耕地SOM有關的波段不僅限于近紅外區間;基于PLSR模型組合中精
(R2T=0.310,RMSET=6.546;R2V=0.314,RMSEV=8.441,RPD=1.106),推測跟敏感波段數量少不能充分挖掘山區土壤信息有關。
表4-2 機載高光譜土壤有機質反演模型精度表(PLSR)
基于50個廂面土樣作為驗證樣本繪制實測值與預測值的散點圖進行驗證(圖4-1),發現經過FD變換的數據與原始數據相比決定系數R2有明顯提高,SD和LRD有略微提高,CR變化的精度降低,這表明FD、SD和LRD的數據變換有增強可見光和近紅外波段的特質,讓SOM光譜敏感波段的數量增加,建模精度得到提高。分析CR變換可以放大山區土壤光譜反射率之間的差異,同時能提高光譜與有機質在可見光部分的相關性,但機載高光譜自身反射率整體偏低的原因,導致CR變換在突出光譜曲線的吸收、反射特征的效果一般,所以提取敏感波段少,模型精度低。
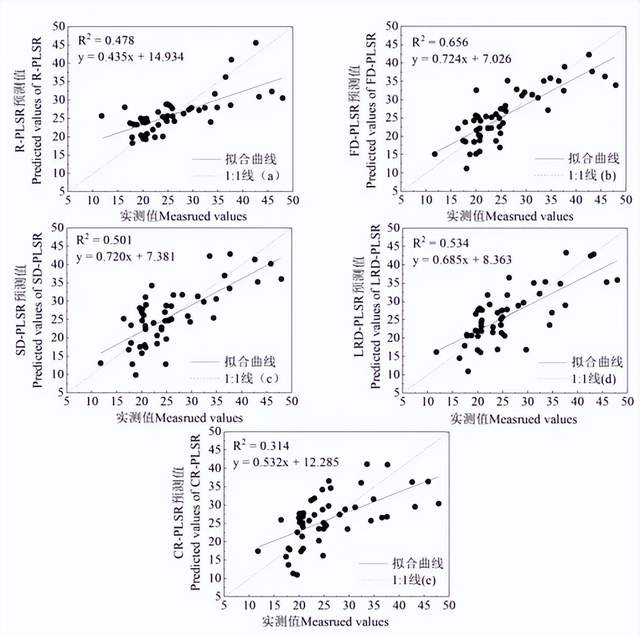
圖 4-1 PLSR模型實測值-預測值散點圖
綜上,通過訓練集和驗證集各項驗證指標分析發現,基于無人機高光譜PLSR土壤有機質含量預測模型中,FD-PLSR模型具有對山區SOM基本的估測能力,其余模型變換組合預估能力較差不能作為山區耕地SOM反演的備用模型;在數據變換方面,能提高模型精度的大小依次是FD>LRD>SD>CR。
4.2.2SVM土壤有機質反演模型
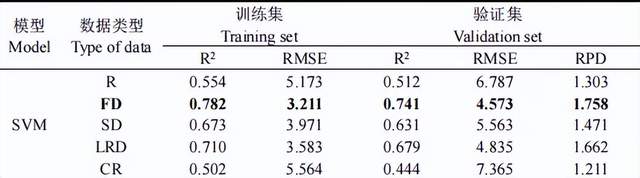
表4-3是山區耕地SOM含量機載高光譜反演的不同光譜變化和SVM的模型組合,分析5種光譜類型與SVM組合的模型中,FD-SVM、SD-PLSR和LRD-SVM等模型的RPD均大于1.4,其中擬合優度表現最為良好的是FD-SVM
(R2T=0.782,RMSET=3.211;R2V=0.741,RMSEV=4.573,RPD=1.758),并且訓練集和驗證集決定系數R2均超過0.7,這代表FD-SVM模型對山區土壤有機質含量有不錯的預測能力,SD和LRD數據變換組合模型同樣達到預測山區土壤有機質含量的基本要求,而原始光譜R與SVM組合模型的決定系數偏低(0.512<0.6),不適用于山區耕地SOM反演;基于CR與SVM組合的回歸模型精度最低
(R2T=0.502,RMSET=5.564;R2V=0.444,RMSEV=7.365,RPD=1.211),盡管與CR-PLSR模型精度相比有明顯提高,但敏感波段少且入選波段范圍單一始終難以達到SOM反演的基本要求。
表4-3機載高光譜土壤有機質反演模型精度表(SVM)
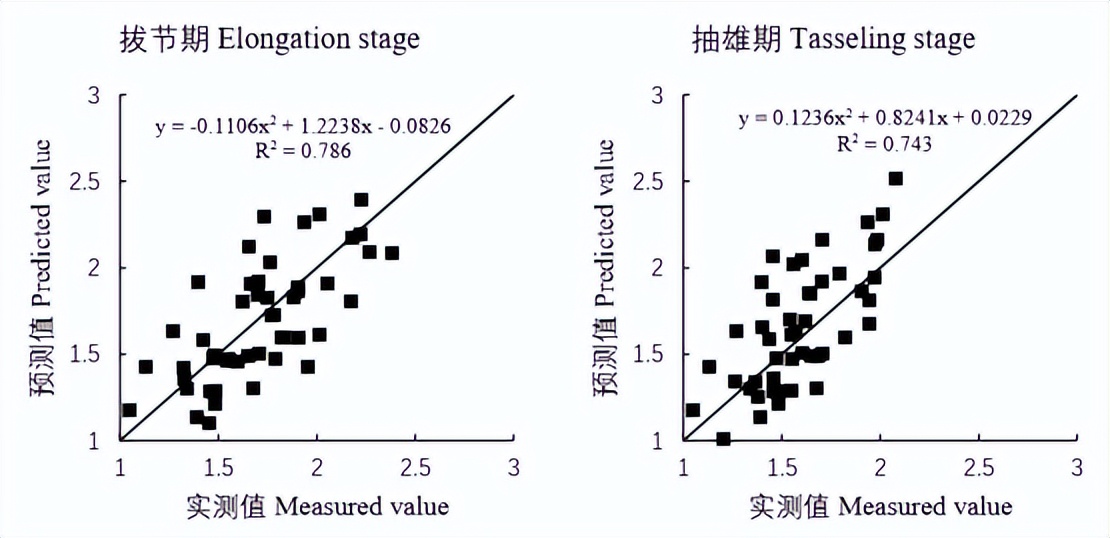
分析SVM模型實測值與預測值散點圖(圖4-2)發現除了CR變換以外的其余3種數據變換的模型精度均大于原始精度,與原始相比較,FD決定系數R2提高了0.085,是無人機高光譜效果最佳的SVM模型,因為FD處理不僅可以消除背景噪聲的干擾,提高光譜分辨率和靈敏度,還易找到相關性高的波段;SD決定系數R2提高0.13,跟FD對比有所下降的原因是SD光譜變換與SOM的相關分析通過顯著性檢驗(p>0.01)的波段過于緊密,導致自變量間多重相關,主成分信息重復,模型反演難以達到理想效果;LRD決定系數R2提高了0.145,這可能跟LRD結合了一階微分和倒數對數的優點,在提高光譜分辨率的同時減少因光照引起的乘勝性因素影響,尋得可見光-近紅外范圍含有山區SOM的敏感波段,使得建模精度有所保障。
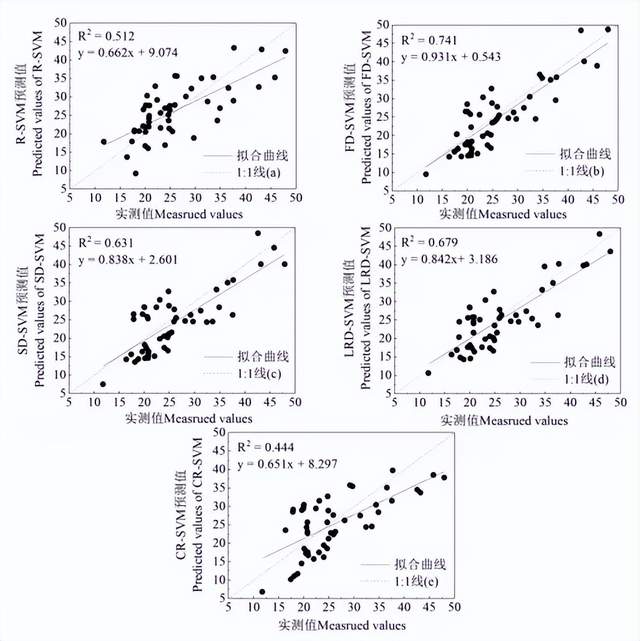
圖4-2 SVM 模型實測值-預測值散點圖
綜上,根據各項驗證指標和散點圖分析發現,基于機載高光譜SVM土壤有機質含量預測模型中,FD-SVM模型具有對山區SOM良好的估測能力,以SD和LRD數據變換與SVM組合的模型預估能力能達到基礎水平;SVM不同組合模型精度均優于PLSR,在數據變換方面,能提高模型精度大小的光譜變換與PLSR結論相同。
4.2.3RF土壤有機質反演模型
表4-4是山區耕地SOM含量機載機高光譜反演的不同光譜變化和RF的模型組合,與PLSR和SVM模型相比,RF整體精度有顯著提高。在訓練集中,FD-RF和SD-RF決定系數R2首次突破0.8,達到估測穩定模型系列,而在以往CR變換組合的模型里也是首次達到預測SOM的基本要求(0.642>0.6)。在驗證集里有R-RF、FD-RF、SD-RF和LRD-RF等模型的RPD均大于1.4,在所有RF組合的模型中,模型擬合優度表現最為良好的是
(R2T=0.843,RMSET=2.876;R2V=0.758,RMSEV=4.139,RPD=1.928),并且訓練集和驗證集決定系數R2差距不大,這表明FD-SVM模型對山區土壤有機質含量有良好的預測能力;SD-RF模型精度首次高于LRD-RF(0.731>0.659),對于SD光譜變換密集出現的吸收谷和反射峰,RF模型具有一定抗噪聲能力,它能判斷不同特征波段之間相互影響程度,對自變量適應能力強,通過決策樹不斷優化訓練效果,提高模型精度;CR-RF模型精度(R2T=0.642,RMSET=4.113;R2V=0.519,RMSEV=6.741,RPD=1.316)。
表4-4機載高光譜土壤有機質反演模型精度表(RF)
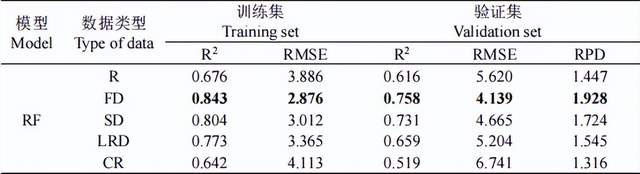
結合RF模型訓練集與驗證集對比分析發現兩者精度差均高于PLSR和SVM模型,前者擬合優度良好且穩定,屬于4種模型里的最優選擇,這與前人研究基本一致,散點圖(圖4-3)以FD和SD變換效果良好,LRD-RF精度與同等反演模型組合的驗證集精度相距甚遠,離散程度大,造成驗證集精度差異大的原因可能跟樣本數量有很大關系,本文在無人機高光譜建模選擇的自變量偏少,這跟入選顯著相關特征波長偏少有關,同時也說明隨機森林更適合多變量的數據樣本進行建模。
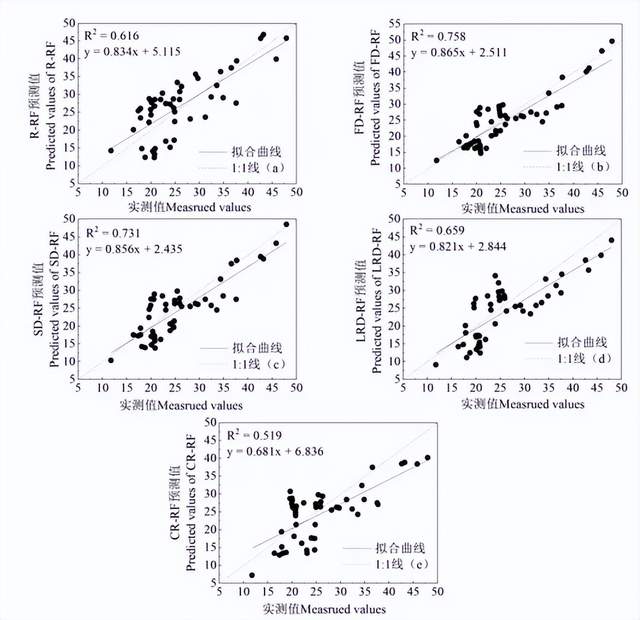
圖4-3 RF模型實測值-預測值散點圖
綜上,根據土壤有機質光譜反演模型精度表和散點圖綜合分析得出,基于無人機高光譜RF土壤有機質含量預測模型中,FD-RF模型具有對山區SOM良好的估測能力,以SD光譜數據變換與RF組合的模型同樣具備對山區SOM含量預測的能力;RF不同組合模型精度均優于PLSR和SVM,在數據變換方面,能提高模型精度的大小分別是FD>SD>LRD>CR。
4.2.4BP神經網絡土壤有機質反演模型
表4-5是山區耕地SOM含量機載高光譜反演的不同光譜變化和BP神經網絡的模型組合,對比PLSR、SVM和RF模型發現,BP模型穩定性更好,表現在驗證集與訓練集精度差距最小,與RF相比具有明顯優勢,在四類模型中預測機質效果更好,整體精度相對提高,原因是BP具有完整數學算法,可通過調整訓練參數優化模型精度,在一定程度上實現對任意非線性函數運算出最優解。
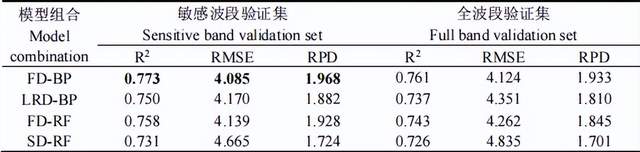
表4-5機載高光譜土壤有機質反演模型精度表(BP)
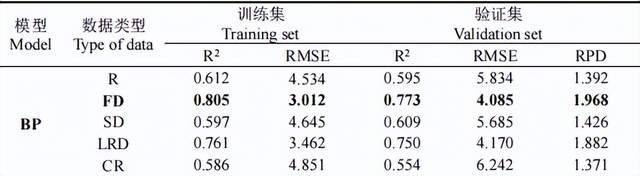
分析5種類型光譜與SVM組合的模型中,所有組合模型的RPD均大于1.4,BP建模效果最佳的模型組合是FD-BP和LRD-BP,其中一階微分與BP神經網絡組合的預測(R2T=0.805,RMSET=3.012;R2V=0.773,RMSEV=4.085,RPD=1.968)
驗證集的決定系數接近0.8,相對分析誤差接近2,在四類模型中精度最高,這意味著FD-BP模型對山區土壤有機質含量具有更加良好的預測能力,其余組合模型只達到預測山區土壤有機質含量的基本要求,而原始光譜與SVM組合模型的決定系數偏低(0.595<0.6),不適用于山區耕地SOM反演;基于CR與BP
組合的回歸模型精度最低
(R2T=0.586,RMSET=4.851;R2V=0.554,RMSEV=6.242,RPD=1.371),說明CR光譜變換組合的模型并不適用于山區耕地SOM預測。
BP神經網絡預測模型的整體能力最高(圖4-4),其中原始光譜R和經過FD、LRD數據變換的BP模型的決定系數均在0.75以上,與它們對等的訓練集差距進一步縮小,以FD-BP組合的模型預測精度離散化最低,這說明BP模型在預測SOM含量方面具有較高的穩定性;以R-BP、CR-BP組合的預測模型離散程度最大,這說明山區土壤蘊含有機質信息的波長范圍寬,同時說明模型不是決定預測效果的唯一因素。
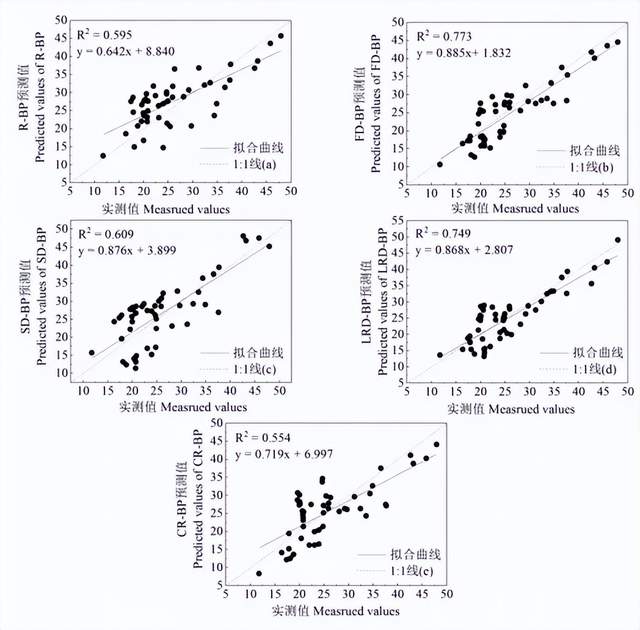
圖4-4 BP模型實測值-預測值散點圖
通過綜合訓練集和測試集各項驗證指標分析發現,在不同變換的光譜數據與模型組合中,FD-BP模型具有最穩定的估測能力,其次是LRD-BP、R-BP、FD-RF、SD-RF和CR-RF模型有良好的預估能力;在數據變換方面,能提高模型精度的大小依次是FD>LRD>SD>CR。在模型選擇方面,更適合山區SOM反演的模型依次為BP>RF>SVM>PLSR。
4.3 模型精度對比
通過實驗對比分析得出,敏感波段所構建的模型精度優于全波段,說明敏感波段更適合于山區SOM含量估測研究。按精度驗證指標(R2、RMSE、RPD)結果得出,以FD-BP反演模型精度和估測能力最高
(R2T=0.805,RMSET=3.012;R2V=0.773,RMSEV=4.085,RPD=1.968),全波段同樣是FD-BP反演模型精度和估測能力最高
(R2T=0.782,RMSET=3.336;R2V=0.761,RMSEV=4.124,RPD=1.933),兩者在提高模型精度的光譜變換研究一致,即FD>LRD>SD>CR,最適用于山區SOM反演的模型都為BP神經網絡。
表4-6最佳反演模型精度表
五、結論
(1)無人機高光譜和地物光譜均具有估測SOM含量的能力。其中無人機高光譜影像具有檢測山區SOM的基本能力,地物光譜具有極好的定量預測SOM含量的能力;
(2)貴州山區土壤的高光譜數據通過光譜預處理和4種光譜數據變換在不同程度上提高它們與SOM之間的相關性,其中一階微分變換可充分挖掘山區土壤信息,通過顯著性檢驗的波段高達941個,相關系數最高達到-0.654;
(3)與SOM進行相關分析得出的敏感波段數量越多且范圍(可見光-近紅外)越寬,其構建的模型效果越好,說明通過相關系數由大到小的原則在光譜有效范圍內均勻篩選的波段不僅能代表土樣信息,還能在建模時減少自變量之間多重相關等問題;
(4)在估測山區耕地SOM含量方面,PLSR具有粗略的估測能力;SVM模型對山區耕地SOM估測相對PLSR有明顯提高;RF優于前兩者但驗證模型精度不是最佳;非線性模型中BP神經網絡以其精度高穩定性好適用于山區耕地SOM估測,以一階微分-BP神經網絡預測效果最優(訓練集:R2=0.852,RMSE=2.534;驗證集:R2=0.878,RMSE=3.315,RPD=2.425),對于貴州多山區SOM監測更具備普適性。
推薦:
便攜式高光譜成像系統iSpecHyper-VS1000
專門用于公安刑偵、物證鑒定、醫學醫療、精準農業、礦物地質勘探等領域的最新產品,主要優勢具有體積小、幀率高、高光譜分辨率高、高像質等性價比特點采用了透射光柵內推掃原理高光譜成像,系統集成高性能數據采集與分析處理系統,高速USB3.0接口傳輸,全靶面高成像質量光學設計,物鏡接口為標準C-Mount,可根據用戶需求更換物鏡。
審核編輯 黃宇
-
遙感
+關注
關注
0文章
252瀏覽量
17231 -
高光譜
+關注
關注
0文章
432瀏覽量
10400
發布評論請先 登錄
多光譜相機賦能耕地用途保護:耕地面積統計、非農非糧識別-守護耕地紅線

高光譜相機如何通過無人機實現地表精準遙感?

高光譜低空遙感技術在水環境監測中的應用—從泥沙量化到污染動態追蹤
地物光譜儀能看出土壤肥不肥,真的假的?

土壤質量好不好,用地物光譜儀一測便知!

為什么做遙感研究一定少不了地物光譜儀?
地物光譜儀如何幫助科學家研究植被和土壤?
當花粉“肉眼可見”:高光譜遙感技術如何破解城市過敏難題?

農業智能化新紀元:高光譜遙感與AI技術的革命性融合!
高光譜相機:農業監測革命新利器!
如何通過地物光譜儀提升生態研究的精度?
如何利用地物高光譜進行空氣質量監測?
基于高光譜的辣椒葉片SPAD反演研究
基于無人機高光譜遙感的河湖水環境探測





 工商網監
工商網監

評論