") 視覺系統(tǒng)輔助引導(dǎo)在激光導(dǎo)航AGV中應(yīng)用
視覺系統(tǒng)輔助引導(dǎo)在激光導(dǎo)航AGV中應(yīng)用
agv
在全球經(jīng)濟步入“寒冬”的大背景下,大量傳統(tǒng)制造業(yè)企業(yè)開始謀劃轉(zhuǎn)變。通過引入AGV系統(tǒng)提升廠內(nèi)物流效率、降低運營成本,已經(jīng)成為制造業(yè)升級的趨勢之一。
AGV是移動機器人的一個重要分支,具有并行作業(yè)、自動化、智能化和柔性化等優(yōu)勢,如今已廣泛應(yīng)用于自動化倉儲系統(tǒng)、智能工廠、智能生產(chǎn)等領(lǐng)域。
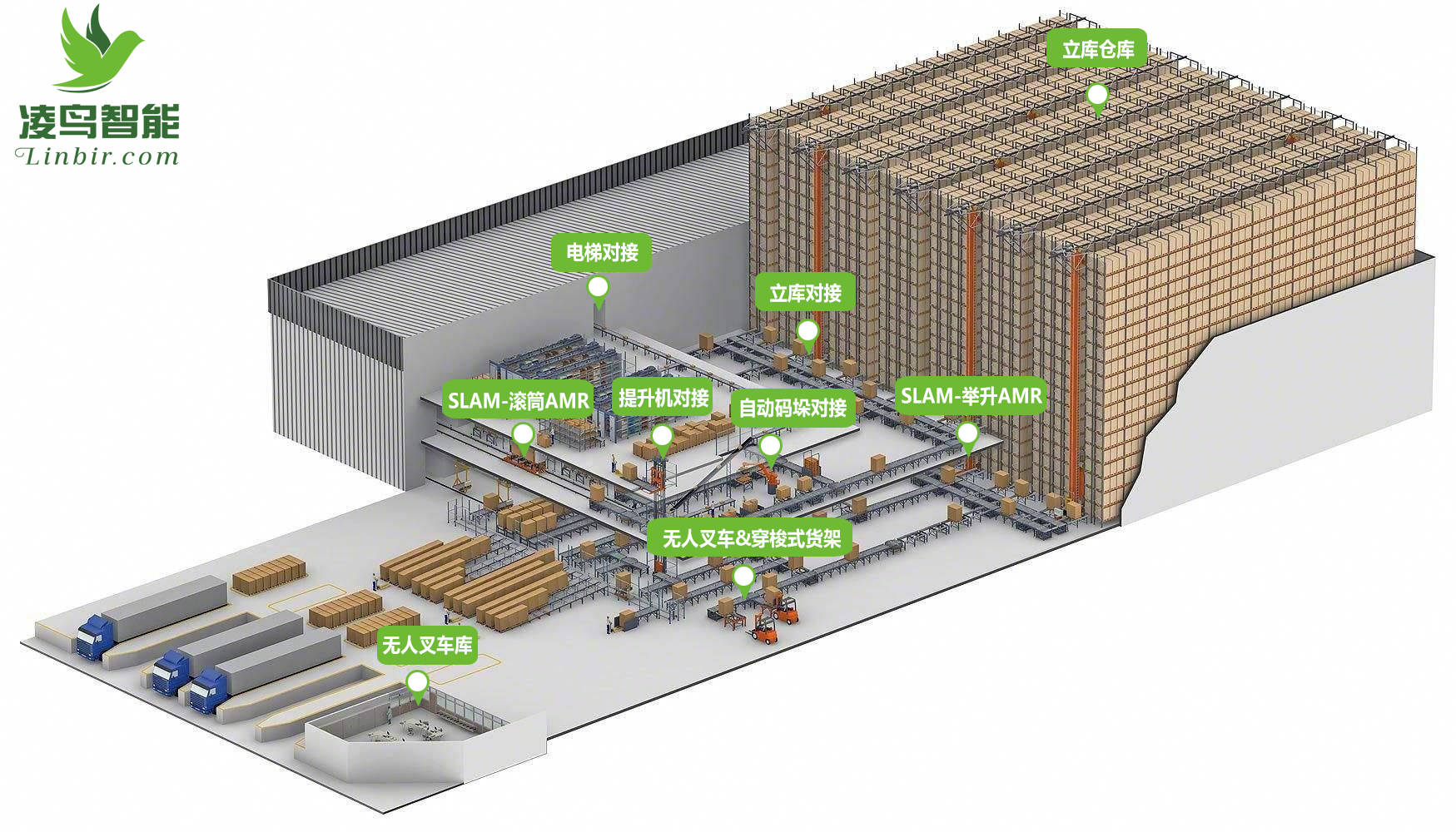
 agv智能倉儲物流
agv智能倉儲物流
目前AGV導(dǎo)航定位使用中較為普遍的技術(shù)是激光定位技術(shù)。激光傳感器被固定在AGV頂部,掃描周邊環(huán)境與移動機器人的距離,并依據(jù)反饋的距離數(shù)據(jù)構(gòu)建成導(dǎo)航地圖。在導(dǎo)航過程中,AGV規(guī)劃的前往地圖中上位機下發(fā)的已知的目標地點執(zhí)行任務(wù),同時AGV實時反饋位置信息和任務(wù)執(zhí)行情況,如圖1。
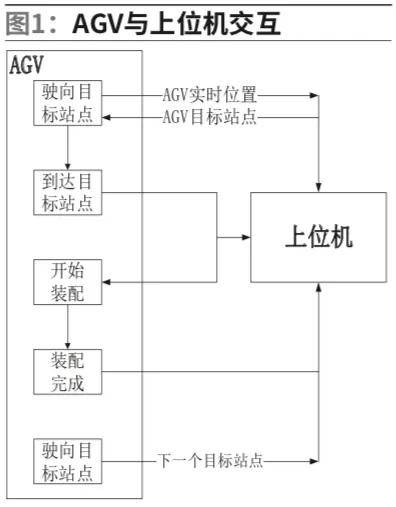 agv與上位機交互
agv與上位機交互
過程中由于貨物的存放可能存在人為改變,或是AGV某一次存放位置偏差較大等,這會造成下一次AGV裝配過程的失敗,執(zhí)行效率降低的同時存在一定不安全性,因此提出在實際應(yīng)用中利用激光導(dǎo)航定位的同時,結(jié)合視覺傳感器獲取信息豐富的特點,對視覺信息進行基于灰度值的模版匹配算法與輪廓邊緣檢測算法找出待取貨物下托盤的中心位置,來保證AGV能夠進行正常的任務(wù)操作。
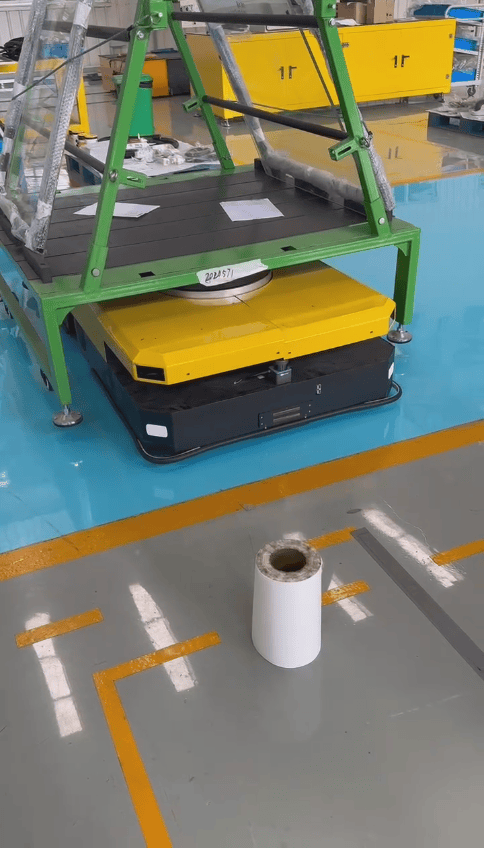 agv潛伏車
agv潛伏車
激光定位選擇比較成熟的SLAM定位算法,物料管理系統(tǒng)下發(fā)任務(wù),AGV管理監(jiān)控計算機將任務(wù)具體下發(fā)分配給AGV,車到相應(yīng)站臺執(zhí)行任務(wù)。視覺輔助運用模板匹配,提取感興趣區(qū)域,邊緣檢測提取輪廓找中心點來檢測貨物托盤所在的位置,數(shù)據(jù)通信部分則主要進行通信轉(zhuǎn)換,將視覺檢測結(jié)果傳輸給AGV,AGV依據(jù)得到數(shù)據(jù),對車位置進行相應(yīng)調(diào)整,同時包含一些對HMI與相機實時通信交互。

審核編輯 黃宇agv小車
激光定位能夠?qū)崿F(xiàn)較高精度水平的定位,但在上位機已經(jīng)下達所需要取卸貨位置后,AGV會嚴格按照任務(wù)命令執(zhí)行,到達位置是在誤差范圍內(nèi)固定的,存在裝載失敗、取不到貨物的情況,AGV輸送系統(tǒng)的主要特點把物流優(yōu)化到最佳狀況做到效率最優(yōu)化,故加入視覺輔助信息,極大增強貨物存卸位置的靈活性,極大提高了工作效率,減少了現(xiàn)場調(diào)試人員的任務(wù)工作量,視覺信息的補充使得最終移動機器人可以快速準確地完成工作,為任務(wù)快速高效完成提供助力。
-
激光
+關(guān)注
關(guān)注
19文章
3181瀏覽量
64449 -
視覺系統(tǒng)
+關(guān)注
關(guān)注
3文章
334瀏覽量
30697 -
AGV
+關(guān)注
關(guān)注
27文章
1302瀏覽量
41074
發(fā)布評論請先 登錄
相關(guān)推薦
AGV小車的工作原理是什么?
AGV激光導(dǎo)航定位技術(shù)綜述與發(fā)展趨勢

深視智能SD-C系列微型激光位移傳感器在激光打標視覺引導(dǎo)中的應(yīng)用

AGV在倉儲物流中的應(yīng)用

安森美機器視覺系統(tǒng)解決方案
AGV激光導(dǎo)航定位技術(shù)與構(gòu)建地圖

什么是AGV小車?有什么功能?適用于哪些場景?
AGV小車在智慧工廠中如何精準定位

機器視覺系統(tǒng)用途與實現(xiàn)及市場趨勢
CCD機器視覺系統(tǒng)的工作原理和特性
機器視覺系統(tǒng)與運動控制系統(tǒng)的區(qū)別
激光焊接視覺定位引導(dǎo)方法
機器視覺系統(tǒng)五個模塊介紹

激光,磁性,視覺?什么是AGV最好的導(dǎo)航系統(tǒng)?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論