

CAN(Controller Area Network)是一種用于汽車和工業(yè)自動(dòng)化領(lǐng)域的通信協(xié)議。它具有高可靠性、實(shí)時(shí)性和靈活性,廣泛應(yīng)用于汽車、工業(yè)控制、醫(yī)療設(shè)備等領(lǐng)域。在實(shí)際應(yīng)用中,CAN通信電路的檢測(cè)和維護(hù)是非常重要的。
- 概述
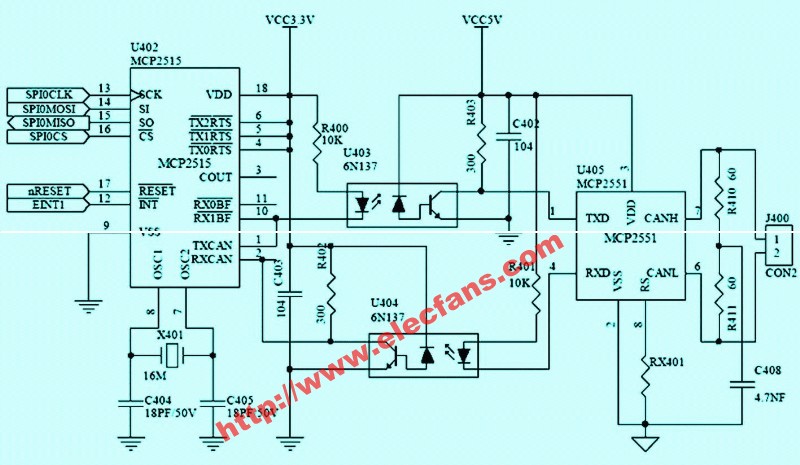
CAN通信電路主要包括CAN控制器、CAN收發(fā)器、CAN總線驅(qū)動(dòng)器、CAN總線終端電阻等部分。在檢測(cè)CAN通信電路的好壞時(shí),需要從以下幾個(gè)方面進(jìn)行:
1.1 硬件檢查
硬件檢查主要包括對(duì)CAN控制器、CAN收發(fā)器、CAN總線驅(qū)動(dòng)器、CAN總線終端電阻等硬件組件的檢查。
1.2 軟件檢查
軟件檢查主要包括對(duì)CAN通信協(xié)議棧、CAN驅(qū)動(dòng)程序、CAN應(yīng)用程序等軟件組件的檢查。
1.3 通信測(cè)試
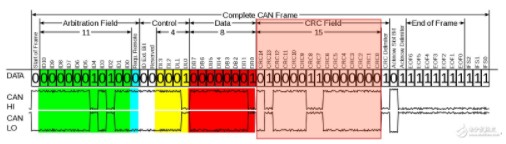
通信測(cè)試主要包括對(duì)CAN總線通信質(zhì)量、CAN節(jié)點(diǎn)通信能力、CAN總線故障診斷等方面的測(cè)試。
- 硬件檢查
2.1 CAN控制器檢查
CAN控制器是CAN通信系統(tǒng)的核心部件,負(fù)責(zé)實(shí)現(xiàn)CAN協(xié)議的控制和管理。在檢查CAN控制器時(shí),需要關(guān)注以下幾個(gè)方面:
2.1.1 電源檢查
檢查CAN控制器的電源是否正常,包括電源電壓、電源電流等參數(shù)。
2.1.2 時(shí)鐘檢查
檢查CAN控制器的時(shí)鐘信號(hào)是否正常,包括時(shí)鐘頻率、時(shí)鐘穩(wěn)定性等參數(shù)。
2.1.3 接口檢查
檢查CAN控制器與其他硬件組件的接口是否正常,包括數(shù)據(jù)線、控制線等。
2.2 CAN收發(fā)器檢查
CAN收發(fā)器是實(shí)現(xiàn)CAN總線通信的關(guān)鍵部件,負(fù)責(zé)將CAN控制器的信號(hào)轉(zhuǎn)換為適合在總線上傳輸?shù)男盘?hào)。在檢查CAN收發(fā)器時(shí),需要關(guān)注以下幾個(gè)方面:
2.2.1 電源檢查
檢查CAN收發(fā)器的電源是否正常,包括電源電壓、電源電流等參數(shù)。
2.2.2 信號(hào)檢查
檢查CAN收發(fā)器的輸入信號(hào)和輸出信號(hào)是否正常,包括信號(hào)電平、信號(hào)速率等參數(shù)。
2.2.3 接口檢查
檢查CAN收發(fā)器與其他硬件組件的接口是否正常,包括數(shù)據(jù)線、控制線等。
2.3 CAN總線驅(qū)動(dòng)器檢查
CAN總線驅(qū)動(dòng)器是實(shí)現(xiàn)CAN總線通信的輔助部件,負(fù)責(zé)驅(qū)動(dòng)CAN總線上的信號(hào)。在檢查CAN總線驅(qū)動(dòng)器時(shí),需要關(guān)注以下幾個(gè)方面:
2.3.1 電源檢查
檢查CAN總線驅(qū)動(dòng)器的電源是否正常,包括電源電壓、電源電流等參數(shù)。
2.3.2 信號(hào)檢查
檢查CAN總線驅(qū)動(dòng)器的輸入信號(hào)和輸出信號(hào)是否正常,包括信號(hào)電平、信號(hào)速率等參數(shù)。
2.3.3 接口檢查
檢查CAN總線驅(qū)動(dòng)器與其他硬件組件的接口是否正常,包括數(shù)據(jù)線、控制線等。
2.4 CAN總線終端電阻檢查
CAN總線終端電阻是實(shí)現(xiàn)CAN總線通信的輔助部件,負(fù)責(zé)匹配CAN總線的阻抗。在檢查CAN總線終端電阻時(shí),需要關(guān)注以下幾個(gè)方面:
2.4.1 電阻值檢查
檢查CAN總線終端電阻的電阻值是否符合設(shè)計(jì)要求,通常為120Ω。
2.4.2 連接檢查
檢查CAN總線終端電阻是否正確連接到CAN總線的兩端。
- 軟件檢查
3.1 CAN通信協(xié)議棧檢查
CAN通信協(xié)議棧是實(shí)現(xiàn)CAN通信的軟件基礎(chǔ),包括物理層、數(shù)據(jù)鏈路層、網(wǎng)絡(luò)層等。在檢查CAN通信協(xié)議棧時(shí),需要關(guān)注以下幾個(gè)方面:
3.1.1 協(xié)議一致性檢查
檢查CAN通信協(xié)議棧是否符合CAN協(xié)議的標(biāo)準(zhǔn)要求。
3.1.2 功能完整性檢查
檢查CAN通信協(xié)議棧是否實(shí)現(xiàn)了CAN協(xié)議的所有功能。
3.1.3 性能測(cè)試
檢查CAN通信協(xié)議棧的性能,包括通信速率、通信延遲等。
3.2 CAN驅(qū)動(dòng)程序檢查
CAN驅(qū)動(dòng)程序是實(shí)現(xiàn)CAN通信的軟件接口,負(fù)責(zé)管理CAN控制器和CAN收發(fā)器。在檢查CAN驅(qū)動(dòng)程序時(shí),需要關(guān)注以下幾個(gè)方面:
3.2.1 兼容性檢查
檢查CAN驅(qū)動(dòng)程序是否兼容當(dāng)前的硬件平臺(tái)。
3.2.2 功能完整性檢查
檢查CAN驅(qū)動(dòng)程序是否實(shí)現(xiàn)了CAN控制器和CAN收發(fā)器的所有功能。
3.2.3 性能測(cè)試
檢查CAN驅(qū)動(dòng)程序的性能,包括通信速率、通信延遲等。
3.3 CAN應(yīng)用程序檢查
CAN應(yīng)用程序是實(shí)現(xiàn)CAN通信的軟件應(yīng)用,負(fù)責(zé)實(shí)現(xiàn)具體的通信任務(wù)。在檢查CAN應(yīng)用程序時(shí),需要關(guān)注以下幾個(gè)方面:
3.3.1 功能完整性檢查
檢查CAN應(yīng)用程序是否實(shí)現(xiàn)了所需的通信任務(wù)。
3.3.2 性能測(cè)試
檢查CAN應(yīng)用程序的性能,包括通信速率、通信延遲等。
-
CAN通信
+關(guān)注
關(guān)注
5文章
97瀏覽量
18300 -
通信電路
+關(guān)注
關(guān)注
3文章
34瀏覽量
14973 -
工業(yè)自動(dòng)化
+關(guān)注
關(guān)注
17文章
2648瀏覽量
68082 -
終端電阻
+關(guān)注
關(guān)注
1文章
95瀏覽量
12079
發(fā)布評(píng)論請(qǐng)先 登錄
如何檢測(cè)電池的好壞
關(guān)于單片機(jī)GPIO口通道檢測(cè)好壞的電路設(shè)計(jì)?
如何在CAN總線通信過程中進(jìn)行CRC錯(cuò)誤檢測(cè)
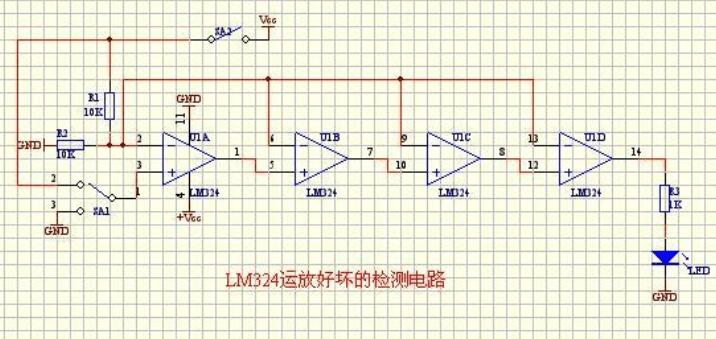
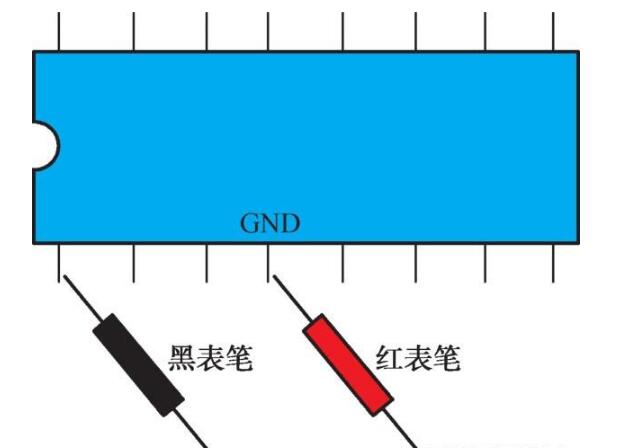
集成電路的好壞檢測(cè)方法
集成電路好壞檢測(cè)的方法有哪些
鎮(zhèn)流器的好壞如何檢測(cè)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論