 工業機器人控制柜的組成有哪些
工業機器人控制柜的組成有哪些
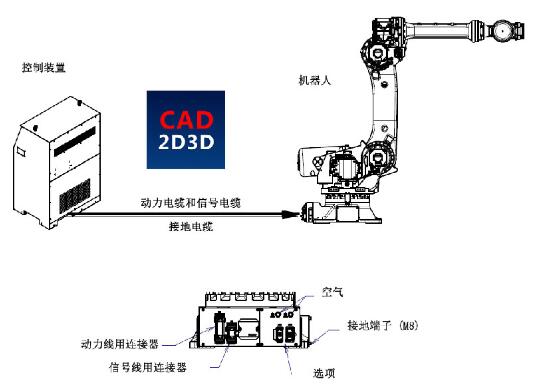
工業機器人控制柜是工業機器人系統的核心組成部分,它負責接收操作者或自動化系統的指令,控制機器人的運動和工作。控制柜的設計和制造對于機器人的性能、穩定性和可靠性至關重要。本文將詳細介紹工業機器人控制柜的組成,包括硬件和軟件兩個方面。
一、硬件組成
電源模塊是控制柜的能源供應部分,它負責將輸入的交流電轉換為機器人所需的直流電。電源模塊通常包括整流器、濾波器、穩壓器和保護電路等。整流器將交流電轉換為脈動直流電,濾波器消除脈動直流電中的紋波,穩壓器保證輸出電壓的穩定,保護電路則在電源模塊出現異常時進行保護。
控制器是控制柜的核心部件,它負責接收操作者或自動化系統的指令,計算機器人的運動軌跡和速度,控制機器人的各個關節和執行器。控制器通常包括主控制器、運動控制器和I/O接口等。主控制器負責處理高級指令和協調各個子系統的工作,運動控制器負責實現機器人的運動控制,I/O接口則負責與外部設備進行通信。
驅動器是控制柜的動力輸出部分,它負責將控制器的指令轉換為機器人各個關節和執行器的驅動力。驅動器通常包括伺服驅動器、步進驅動器和直流驅動器等。伺服驅動器具有高精度、高響應速度和高穩定性的特點,適用于高精度和高速度的機器人應用;步進驅動器具有結構簡單、成本低和控制方便的特點,適用于低速和低精度的機器人應用;直流驅動器則具有大扭矩、高效率和高可靠性的特點,適用于重型和大型機器人應用。
傳感器是控制柜的感知部分,它負責檢測機器人的運動狀態、位置、速度、力矩等信息,并將這些信息反饋給控制器。傳感器通常包括編碼器、力矩傳感器、觸覺傳感器、視覺傳感器等。編碼器用于檢測機器人關節的角度和速度,力矩傳感器用于檢測機器人關節的力矩,觸覺傳感器用于檢測機器人與物體的接觸狀態,視覺傳感器則用于獲取機器人工作環境的視覺信息。
- 通信模塊
通信模塊是控制柜的信息傳輸部分,它負責將控制柜內部的信息傳輸到外部設備,或將外部設備的信息傳輸到控制柜內部。通信模塊通常包括以太網模塊、串行通信模塊、無線通信模塊等。以太網模塊用于實現控制柜與工業以太網的連接,串行通信模塊用于實現控制柜與串行設備的連接,無線通信模塊則用于實現控制柜與無線設備的連接。
- 人機界面
人機界面是控制柜的操作部分,它負責將操作者的指令輸入到控制柜,并將控制柜的狀態信息顯示給操作者。人機界面通常包括觸摸屏、鍵盤、鼠標、指示燈、顯示屏等。觸摸屏和鍵盤用于輸入操作者的指令,鼠標用于實現精確的操作,指示燈用于顯示控制柜的工作狀態,顯示屏則用于顯示控制柜的詳細信息。
- 安全模塊
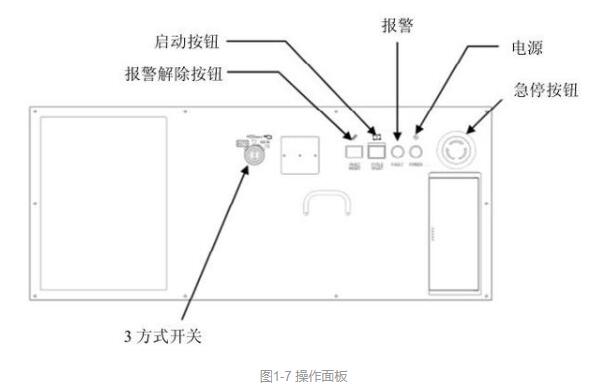
安全模塊是控制柜的保護部分,它負責在機器人出現異常或危險情況時進行保護和報警。安全模塊通常包括緊急停止按鈕、安全門開關、安全光幕等。緊急停止按鈕用于在機器人出現異常時立即停止其運動,安全門開關用于檢測機器人的安全區域是否被侵入,安全光幕則用于檢測機器人的工作區域是否有人或物體進入。
二、軟件組成
操作系統是控制柜軟件的基礎,它負責管理控制柜的硬件資源,提供軟件運行的環境。常見的操作系統包括實時操作系統(RTOS)、嵌入式操作系統(如Linux、VxWorks等)和通用操作系統(如Windows、macOS等)。
- 機器人編程語言
機器人編程語言是用于編寫機器人控制程序的編程語言,它具有易于理解和編寫、易于調試和維護的特點。常見的機器人編程語言包括C/C++、Python、Java等。
- 機器人運動學和動力學庫
機器人運動學和動力學庫是用于計算機器人的運動軌跡和速度的軟件庫,它包括正運動學、逆運動學、動力學模型等。這些庫可以簡化機器人控制程序的編寫,提高程序的可靠性和穩定性。
- 機器人控制算法
機器人控制算法是用于實現機器人運動控制的算法,它包括PID控制、自適應控制、模糊控制等。這些算法可以根據機器人的實際運動狀態和工作環境,自動調整控制參數,實現精確和穩定的控制。
- 機器人通信協議
機器人通信協議是用于實現控制柜與外部設備通信的協議,它包括Modbus、Profibus、EtherCAT等。這些協議可以保證通信的可靠性和實時性,提高機器人系統的兼容性和擴展性。
-
濾波器
+關注
關注
161文章
7924瀏覽量
179587 -
自動化系統
+關注
關注
3文章
261瀏覽量
29810 -
工業機器人
+關注
關注
91文章
3396瀏覽量
93125 -
控制柜
+關注
關注
4文章
166瀏覽量
15317
發布評論請先 登錄
相關推薦
什么是工業機器人
青島ABB工業機器人無法正常進入系統故障維修
一種工業機器人碼垛實操工作站
PDF——工業機器人技術及應用
工業機器人控制柜組成_工業機器人控制柜的作用是什么
工業機器人安裝調試的13個步驟


基于KUKA C4機器人的控制柜(CCU)設計







 工商網監
工商網監
評論