

一、引言
在工業(yè)自動化控制中,電動機(jī)作為動力源,其正反轉(zhuǎn)控制是常見的控制需求。傳統(tǒng)的電動機(jī)正反轉(zhuǎn)控制主要依賴?yán)^電器或接觸器實(shí)現(xiàn),但隨著可編程邏輯控制器(PLC)技術(shù)的發(fā)展,PLC在電動機(jī)正反轉(zhuǎn)控制中得到了廣泛應(yīng)用。本文旨在詳細(xì)解析PLC控制電動機(jī)正反轉(zhuǎn)電路的原理,并通過分點(diǎn)表示和歸納的方式,為讀者提供清晰、全面的理解。
二、PLC控制電動機(jī)正反轉(zhuǎn)電路的基本組成
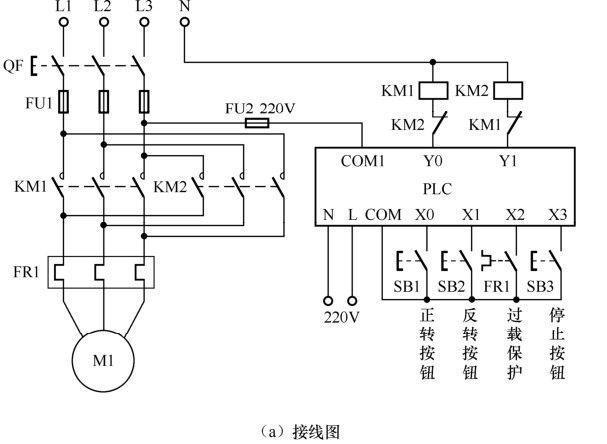
PLC控制電動機(jī)正反轉(zhuǎn)電路主要由以下幾個部分組成:
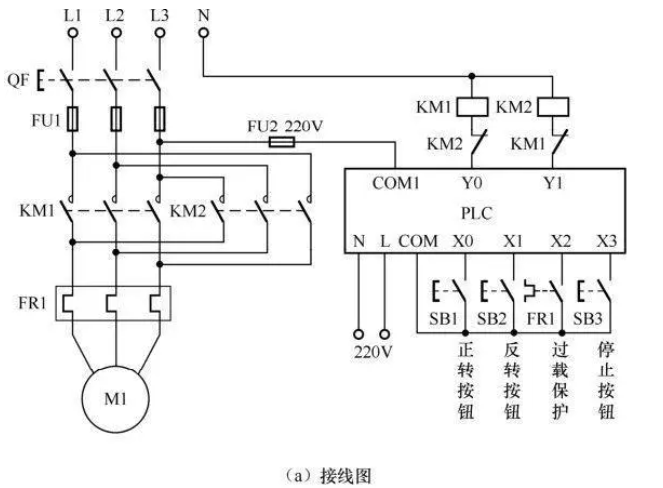
PLC控制器:作為電路的核心部分,PLC控制器負(fù)責(zé)接收外部輸入信號,根據(jù)內(nèi)部程序邏輯判斷,輸出控制信號。
輸入設(shè)備:包括正轉(zhuǎn)按鈕、反轉(zhuǎn)按鈕和停止按鈕等,用于向PLC發(fā)送控制指令。
輸出設(shè)備:通常為電動機(jī)驅(qū)動電路,用于接收PLC的輸出信號,控制電動機(jī)的正反轉(zhuǎn)和停止。
電動機(jī):作為被控對象,其正反轉(zhuǎn)和停止?fàn)顟B(tài)由PLC控制。
三、PLC控制電動機(jī)正反轉(zhuǎn)電路的工作原理
PLC控制電動機(jī)正反轉(zhuǎn)電路的工作原理可以概括為以下幾個步驟:
輸入采樣階段
在輸入采樣階段,PLC以掃描方式依次讀入所有輸入狀態(tài)和數(shù)據(jù),包括正轉(zhuǎn)按鈕、反轉(zhuǎn)按鈕和停止按鈕的狀態(tài)。這些輸入狀態(tài)和數(shù)據(jù)被存儲在PLC的輸入映像寄存器中,作為后續(xù)程序執(zhí)行的依據(jù)。
用戶程序執(zhí)行階段
在用戶程序執(zhí)行階段,PLC按照梯形圖或指令表的順序執(zhí)行程序。當(dāng)檢測到正轉(zhuǎn)按鈕被按下時,PLC會執(zhí)行正轉(zhuǎn)控制程序,輸出正轉(zhuǎn)控制信號;當(dāng)檢測到反轉(zhuǎn)按鈕被按下時,PLC會執(zhí)行反轉(zhuǎn)控制程序,輸出反轉(zhuǎn)控制信號;當(dāng)檢測到停止按鈕被按下時,PLC會執(zhí)行停止控制程序,輸出停止控制信號。
在執(zhí)行控制程序時,PLC會通過內(nèi)部邏輯運(yùn)算判斷電動機(jī)的轉(zhuǎn)向。具體來說,PLC會根據(jù)輸入的正反轉(zhuǎn)按鈕狀態(tài),以及當(dāng)前電動機(jī)的轉(zhuǎn)向狀態(tài)(正轉(zhuǎn)或反轉(zhuǎn)),決定輸出相應(yīng)的控制信號。例如,當(dāng)電動機(jī)當(dāng)前處于停止?fàn)顟B(tài),且正轉(zhuǎn)按鈕被按下時,PLC會輸出正轉(zhuǎn)控制信號,使電動機(jī)開始正轉(zhuǎn);當(dāng)電動機(jī)當(dāng)前處于正轉(zhuǎn)狀態(tài),且反轉(zhuǎn)按鈕被按下時,PLC會輸出反轉(zhuǎn)控制信號,使電動機(jī)開始反轉(zhuǎn)。
輸出刷新階段
當(dāng)用戶程序執(zhí)行結(jié)束后,PLC進(jìn)入輸出刷新階段。在這個階段,PLC會將輸出映像寄存器中的狀態(tài)和數(shù)據(jù)通過輸出電路傳輸?shù)捷敵鲈O(shè)備(電動機(jī)驅(qū)動電路),控制電動機(jī)的正反轉(zhuǎn)和停止。同時,PLC也會更新輸入映像寄存器的狀態(tài)和數(shù)據(jù),以反映當(dāng)前電動機(jī)的實(shí)際狀態(tài)。
四、PLC控制電動機(jī)正反轉(zhuǎn)電路的關(guān)鍵技術(shù)
邏輯控制功能:PLC利用內(nèi)部的邏輯運(yùn)算功能,根據(jù)輸入的正反轉(zhuǎn)按鈕狀態(tài)和當(dāng)前電動機(jī)的轉(zhuǎn)向狀態(tài),判斷輸出相應(yīng)的控制信號。這是實(shí)現(xiàn)電動機(jī)正反轉(zhuǎn)控制的核心技術(shù)。
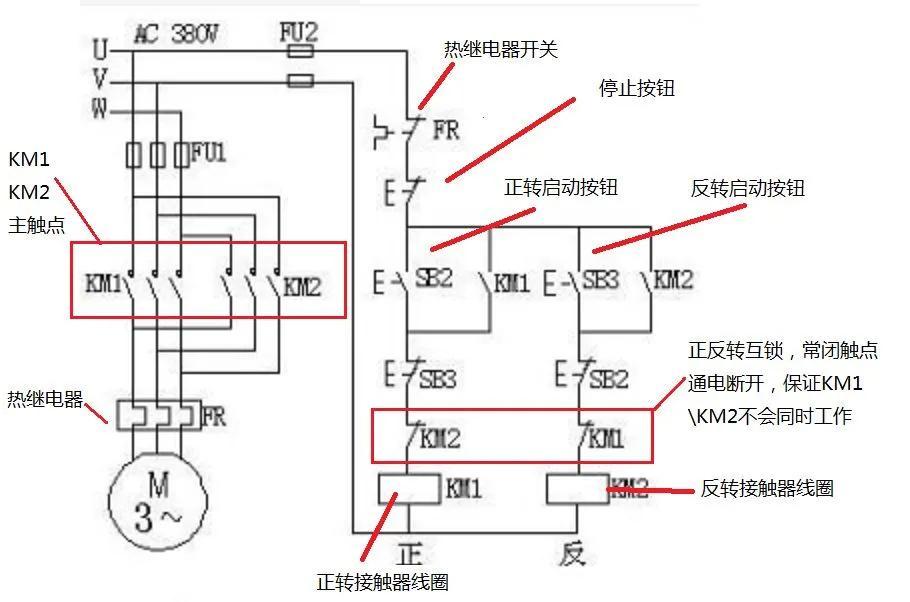
互鎖技術(shù):為了避免電動機(jī)正反轉(zhuǎn)控制電路中出現(xiàn)同時接通正反轉(zhuǎn)控制線路的情況(即短路),通常會在PLC程序中設(shè)置互鎖功能。當(dāng)正轉(zhuǎn)控制線路接通時,反轉(zhuǎn)控制線路將被鎖定;反之亦然。這樣可以確保電動機(jī)在任意時刻只能按照一種方向旋轉(zhuǎn)。
延時技術(shù):為了防止電動機(jī)在頻繁切換正反轉(zhuǎn)時出現(xiàn)過載或損壞的情況,可以在PLC程序中設(shè)置延時功能。當(dāng)電動機(jī)從一個方向切換到另一個方向時,PLC會先停止電動機(jī)一段時間(通常為幾秒鐘),然后再啟動電動機(jī)按照新的方向旋轉(zhuǎn)。這樣可以減少電動機(jī)的負(fù)載沖擊和磨損。
五、總結(jié)
本文詳細(xì)解析了PLC控制電動機(jī)正反轉(zhuǎn)電路的原理和技術(shù)。通過輸入采樣、用戶程序執(zhí)行和輸出刷新三個階段的工作流程以及邏輯控制、互鎖和延時等關(guān)鍵技術(shù)的應(yīng)用,PLC能夠?qū)崿F(xiàn)對電動機(jī)精確、可靠的正反轉(zhuǎn)控制。在實(shí)際應(yīng)用中,可以根據(jù)具體需求和場景選擇合適的PLC型號和編程方式來實(shí)現(xiàn)電動機(jī)的正反轉(zhuǎn)控制功能。
-
plc
+關(guān)注
關(guān)注
5028文章
13603瀏覽量
470997 -
電動機(jī)
+關(guān)注
關(guān)注
75文章
4143瀏覽量
98029 -
正反轉(zhuǎn)電路
+關(guān)注
關(guān)注
3文章
37瀏覽量
9219
發(fā)布評論請先 登錄
PLC控制電動機(jī)正反轉(zhuǎn)電路講解
電動機(jī)正反轉(zhuǎn)的工作原理及接線方法
PLC控制三相異步電動機(jī)正反轉(zhuǎn)系列
異步電動機(jī)正反轉(zhuǎn)PLC控制的編程步驟及方法是什么?
三相電動機(jī)正反轉(zhuǎn)控制
電動機(jī)正反轉(zhuǎn)控制電路
PLC控制電動機(jī)正反轉(zhuǎn)方式圖解

控制 | PLC控制電動機(jī)正反轉(zhuǎn)的方法圖解
實(shí)例分析,PLC控制變頻調(diào)速電動機(jī)正反轉(zhuǎn)電路
PLC控制電動機(jī)正反轉(zhuǎn)電路原理分析和接線方法





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論