 PLC與機器人之間如何通訊
PLC與機器人之間如何通訊
一、引言
在現代工業自動化領域,可編程邏輯控制器(PLC)和機器人作為兩大核心設備,其間的通訊是實現自動化生產線高效、穩定運行的關鍵。PLC以其高可靠性、強適應性和易編程性等特點,在工業自動化控制中占據重要地位;而機器人則以其高精度、高效率的作業能力,成為現代生產線上不可或缺的一員。本文將從PLC與機器人通訊的原理、方式、協議以及實際應用等多個方面,詳細介紹二者之間的通訊過程。
二、PLC與機器人通訊的原理
PLC與機器人之間的通訊,本質上是一種數據交換和控制指令的傳輸過程。在這個過程中,PLC作為控制核心,負責接收來自傳感器、操作臺等設備的輸入信號,經過內部邏輯運算和判斷后,將控制指令發送給機器人。機器人則根據接收到的指令,執行相應的動作,并將執行過程中的狀態信息反饋給PLC,形成一個完整的閉環控制系統。
三、PLC與機器人通訊的方式
PLC與機器人之間的通訊方式多種多樣,常見的包括以下幾種:
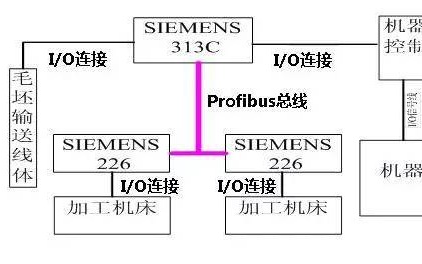
現場總線通訊:如Profibus、Ethernet/IP等。這種方式通過專門的通訊線路,將PLC和機器人連接起來,實現高速、穩定的數據傳輸。其中,Profibus是一種抗干擾性強的通信協議,適用于自動化工控系統;Ethernet/IP則是一種基于以太網的工業協議,可實現工業自動化設備的即插即用。
I/O模塊通訊:將機器人的輸入輸出信號與PLC的輸入輸出模塊相連接,通過PLC控制機器人的運動和動作。這種方式簡單直接,但靈活性較差,適用于簡單的機器人控制應用。
串口通訊:如RS232、RS485等。通過串口通訊接口,PLC和機器人可以進行點對點的數據交換。這種方式通信距離有限,但成本較低,適用于小型或特定需求的控制系統。
以太網通訊:利用以太網接口,PLC和機器人可以通過互聯網進行通訊。這種方式傳輸速度快、距離遠、支持復雜的網絡結構,是現代工業自動化中最常用的通訊方式之一。
四、PLC與機器人通訊的協議
在PLC與機器人通訊過程中,通訊協議起著至關重要的作用。常見的PLC通訊協議有Modbus、Profibus、Ethernet/IP等。這些協議規定了數據格式、傳輸方式、錯誤處理等關鍵要素,確保PLC和機器人之間能夠準確、可靠地進行數據交換。
Modbus協議:一種串行通信協議,基于開放標準,被廣泛應用于各種自動化和控制應用。Modbus協議有多個版本,包括Modbus RTU、Modbus ASCII和Modbus TCP/IP等,適用于不同的通信環境和需求。
Profibus協議:一種抗干擾性強的通信協議,主要用于自動化工控系統中。Profibus協議有兩個版本:DP和PA。DP版本主要用于連接各種性質的設備、模塊和自動化組件;PA版本則主要用于處理現場設備之間的通訊。
Ethernet/IP協議:一種基于以太網的工業協議,可實現工業自動化設備的即插即用。Ethernet/IP協議支持復雜的網絡結構,如局域網(LAN)和廣域網(WAN),為PLC和機器人之間的通訊提供了更大的靈活性和擴展性。
五、PLC與機器人通訊的實際應用
在實際應用中,PLC與機器人之間的通訊需要根據具體的生產需求和控制要求進行配置和調試。例如,在焊接機器人控制系統中,PLC可以通過以太網接口與機器人進行通訊,實時監測焊接質量、控制焊接參數等;在物料搬運機器人控制系統中,PLC可以通過串口通訊接口與機器人進行通訊,實現物料的自動搬運和分揀等功能。
六、總結
PLC與機器人之間的通訊是實現自動化生產線高效、穩定運行的關鍵環節。通過選擇合適的通訊方式、協議和配置參數,可以確保PLC和機器人之間能夠準確、可靠地進行數據交換和控制指令的傳輸。隨著工業自動化技術的不斷發展,PLC與機器人之間的通訊將更加智能化、高效化,為現代制造業的發展提供有力支持。
-
機器人
+關注
關注
211文章
28380瀏覽量
206916 -
plc
+關注
關注
5010文章
13271瀏覽量
463056 -
可編程邏輯控制器
+關注
關注
4文章
266瀏覽量
25932
發布評論請先 登錄
相關推薦
如何遠程控制機器人?
通過IGT-DSER網關實現各品牌PLC之間,PLC與工業機器人(ModbusTCP)之間通訊
通過IGT-DSER網關實現各品牌PLC之間,PLC與工業機器人(ModbusTCP)之間通訊
通過IGT-DSER網關實現各品牌PLC之間,PLC與工業機器人(ModbusTCP)之間通訊
工業機器人與PLC的通訊連接方式和控制方法
工業機器人與PLC混合編程控制的通訊連接介紹
FANUC機器人與SIEMENS PLC的PROFIBUS-DP通訊技術分析







 工商網監
工商網監
評論