") VL53L4CD TOF開發(fā)(2)----修改測量頻率
VL53L4CD TOF開發(fā)(2)----修改測量頻率
概述
最近在弄ST和瑞薩RA的課程,需要樣片的可以加群申請:615061293 。
VL53L4CD是一款高度集成的飛行時間(ToF)傳感器,廣泛應用于距離測量和接近檢測。為了滿足不同應用場景的需求,合理調整傳感器的測量頻率至關重要。本文旨在介紹如何在VL53L4CD傳感器上修改測量頻率,以優(yōu)化其性能和功耗。
測量頻率指傳感器每秒進行測量的次數(shù),通常以赫茲(Hz)為單位。對于VL53L4CD傳感器,測量頻率的調整能夠影響到傳感器的響應速度、精度以及功耗表現(xiàn)。
視頻教學
https://www.bilibili.com/video/BV1TZ421g74b/
樣品申請
https://www.wjx.top/vm/OhcKxJk.aspx#
完整代碼下載
https://download.csdn.net/download/qq_24312945/89431343
調整測量頻率
根據(jù)不同應用場景,調整測量頻率可以實現(xiàn)以下目的:
提高響應速度:在需要快速檢測目標物體的應用中,增加測量頻率能夠提升傳感器的響應速度。
優(yōu)化功耗:在電池供電的應用中,降低測量頻率可以顯著減少傳感器的能耗,從而延長設備的續(xù)航時間。
增強測量穩(wěn)定性:適當?shù)臏y量頻率設置有助于在不同環(huán)境條件下保持測量數(shù)據(jù)的穩(wěn)定性和可靠性。
調整VL53L4CD傳感器的測量頻率主要涉及修改傳感器的配置文件。傳感器提供了多種配置文件選項,可以通過配置時間預算和測量頻率來實現(xiàn)不同的測量需求。
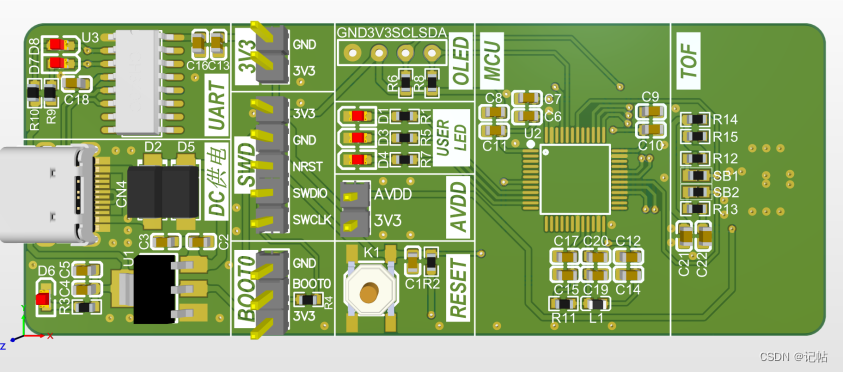
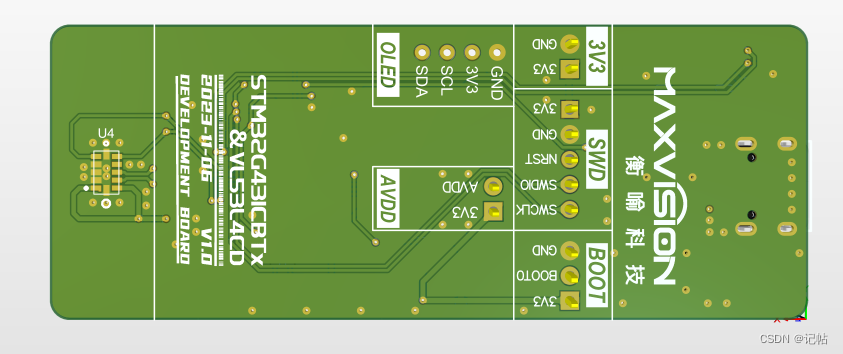
硬件準備
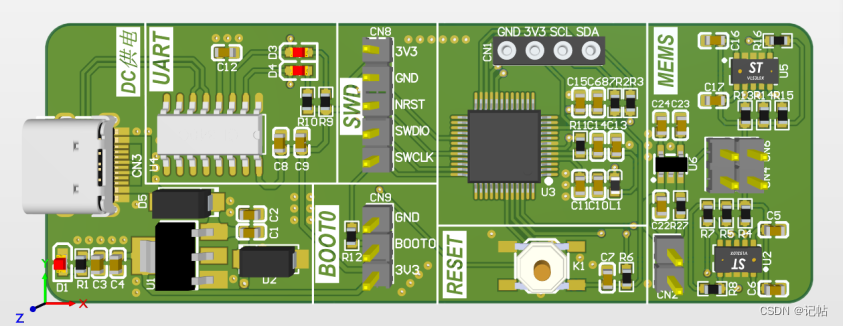
首先需要準備一個開發(fā)板,這里我準備的是自己繪制的開發(fā)板,需要的可以進行申請。
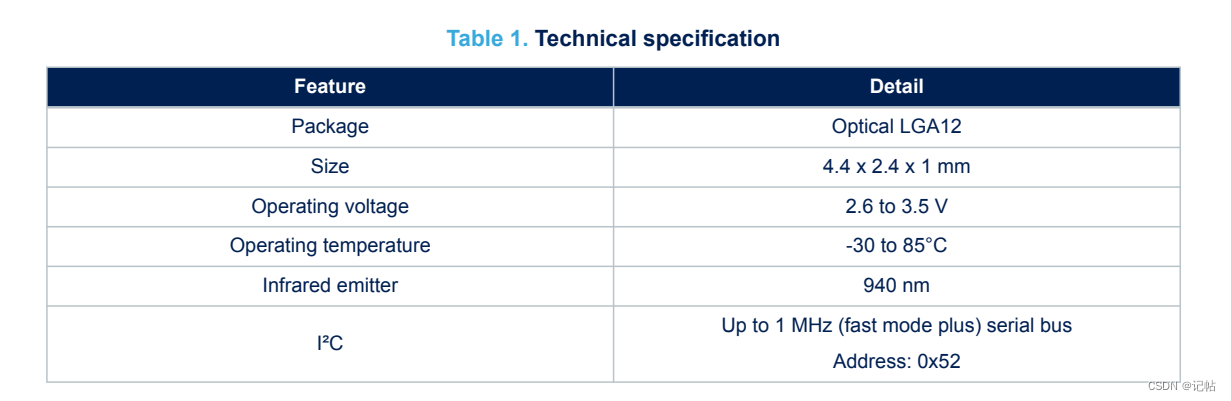
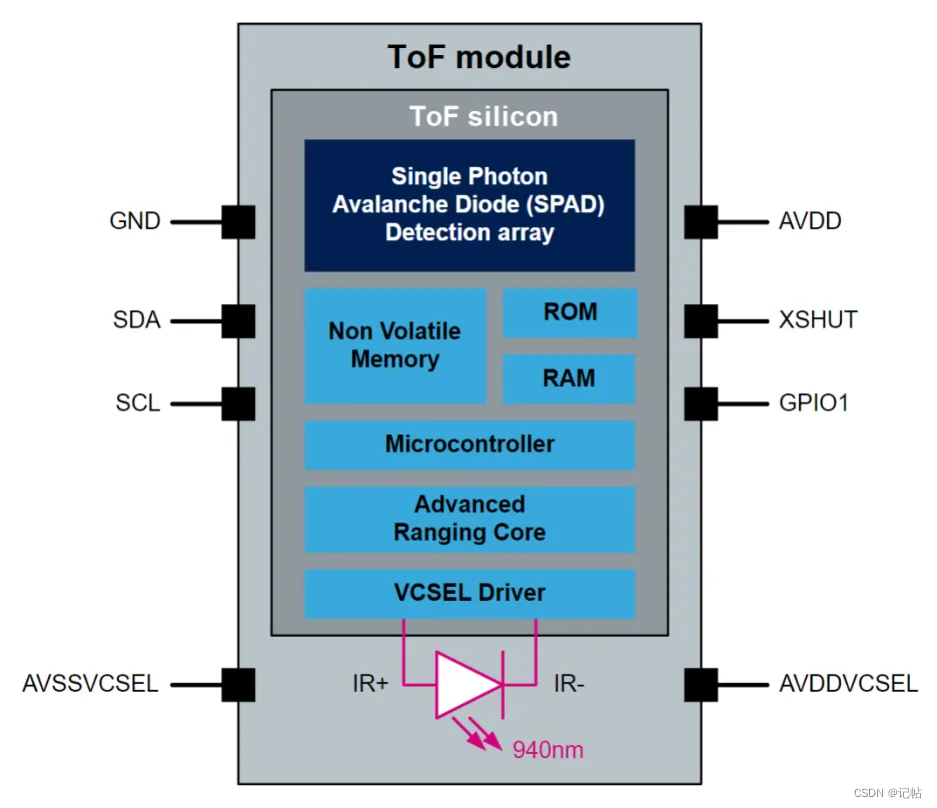
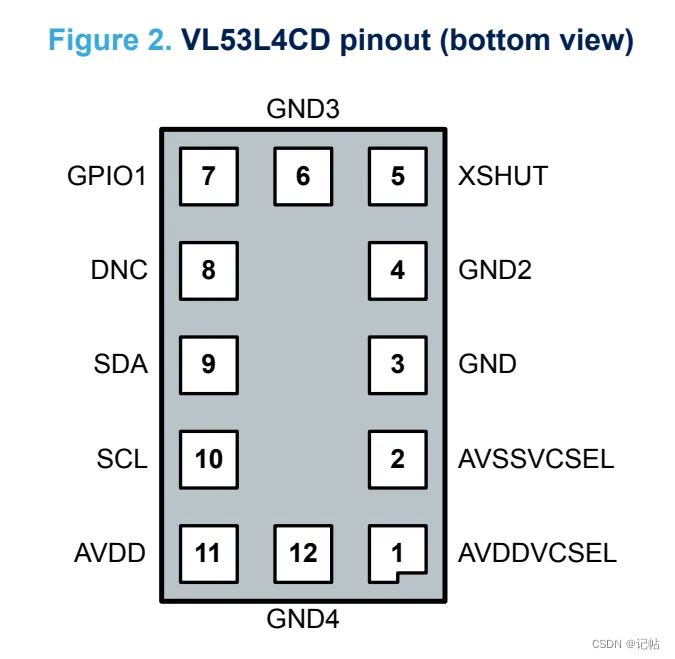
技術規(guī)格
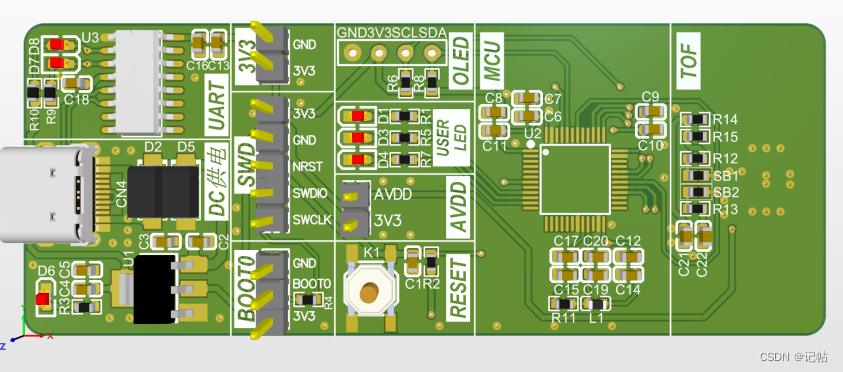
系統(tǒng)框圖
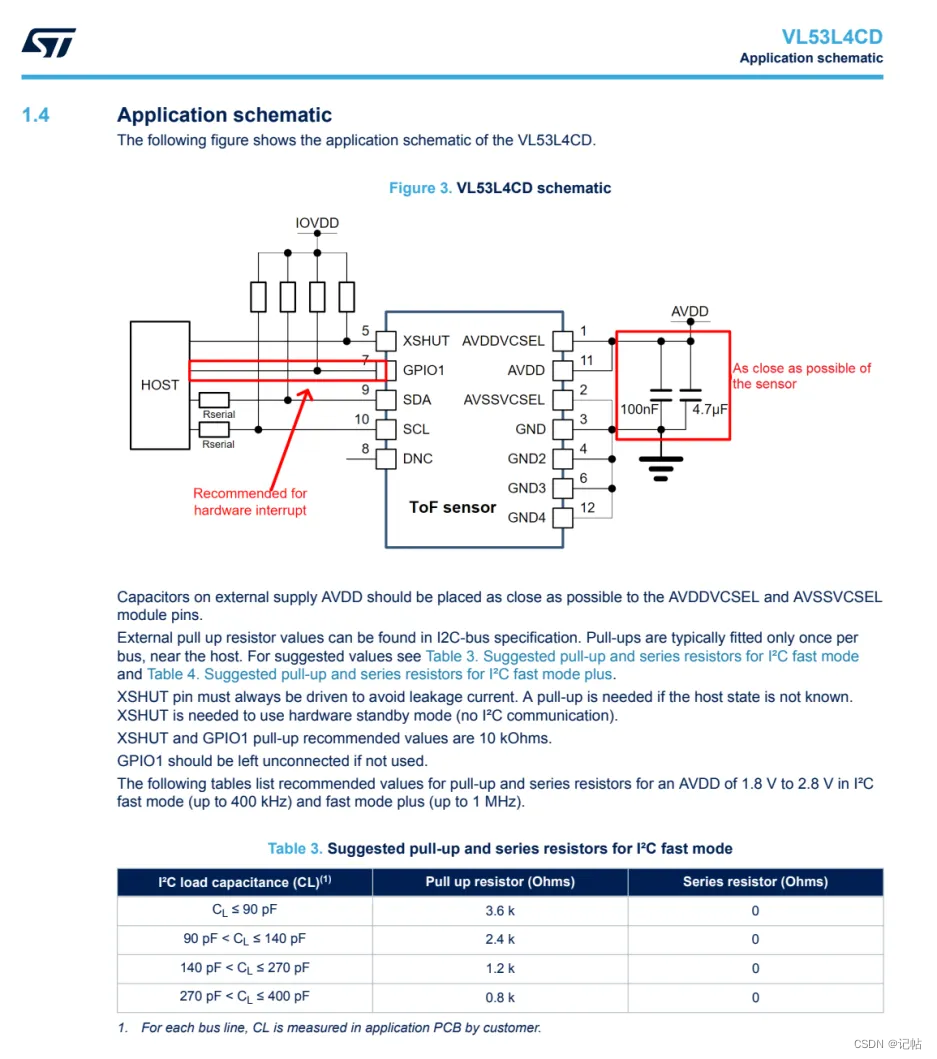
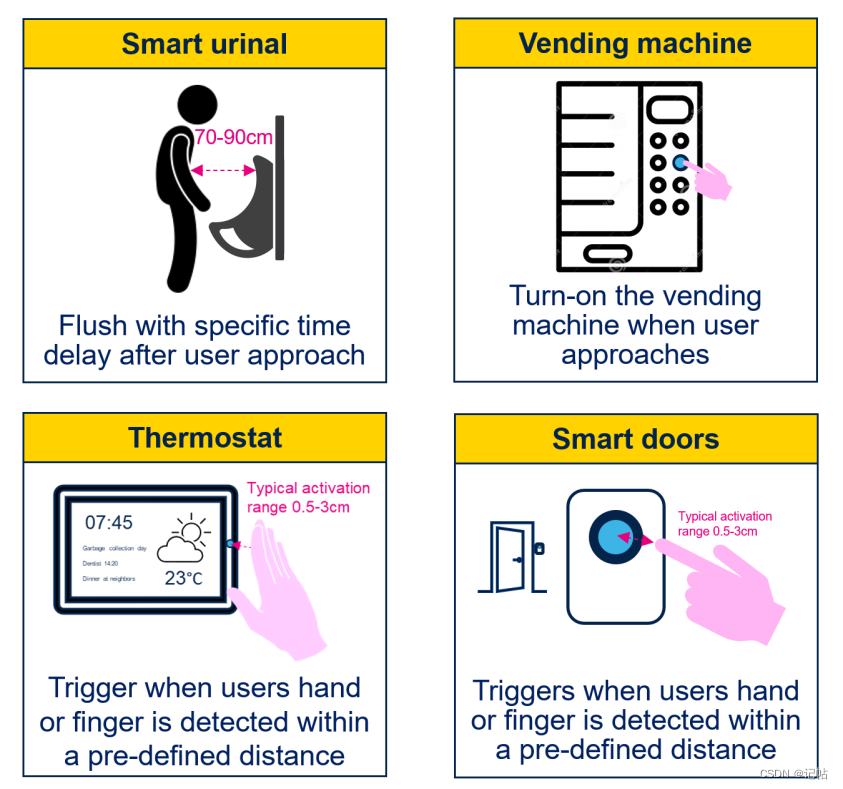
應用示意圖
生成STM32CUBEMX
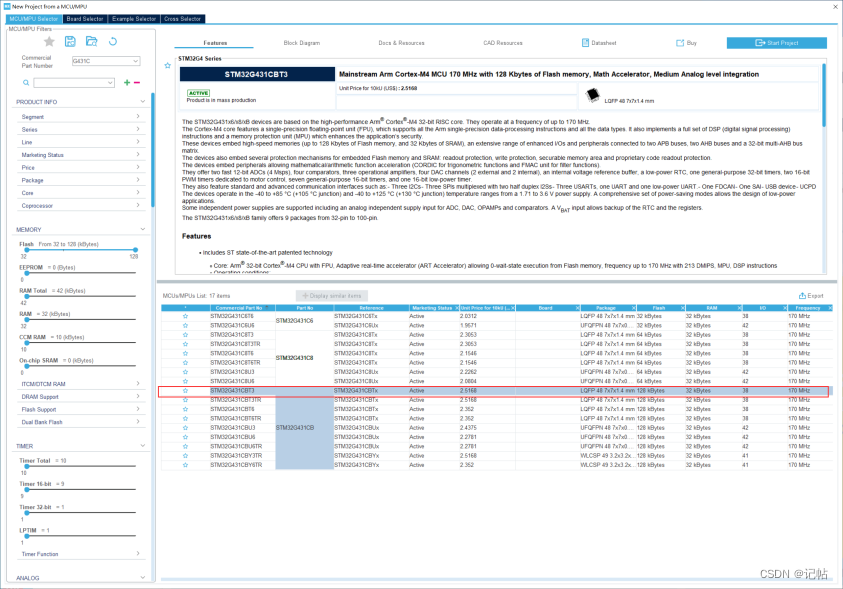
選擇MCU
測試版所用的MCU為STM32G431CB。
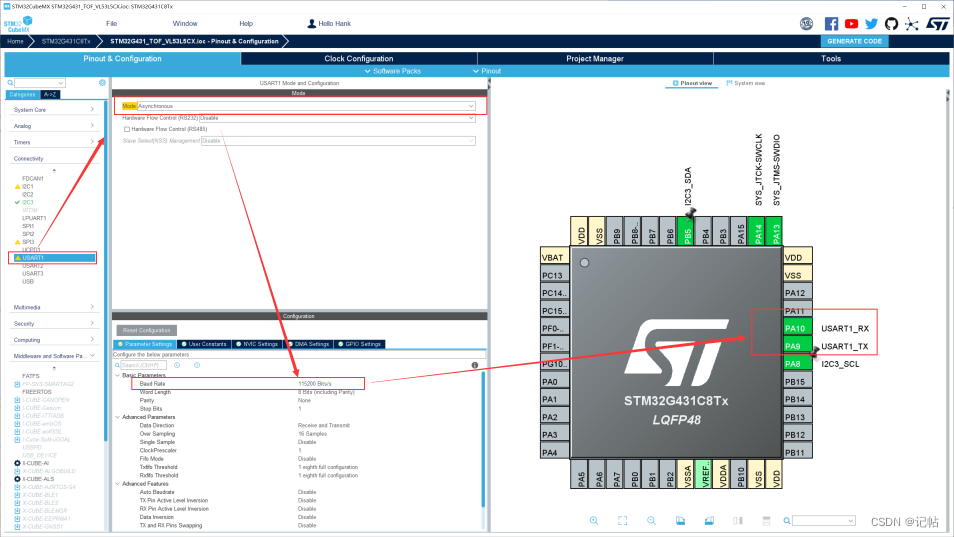
串口配置
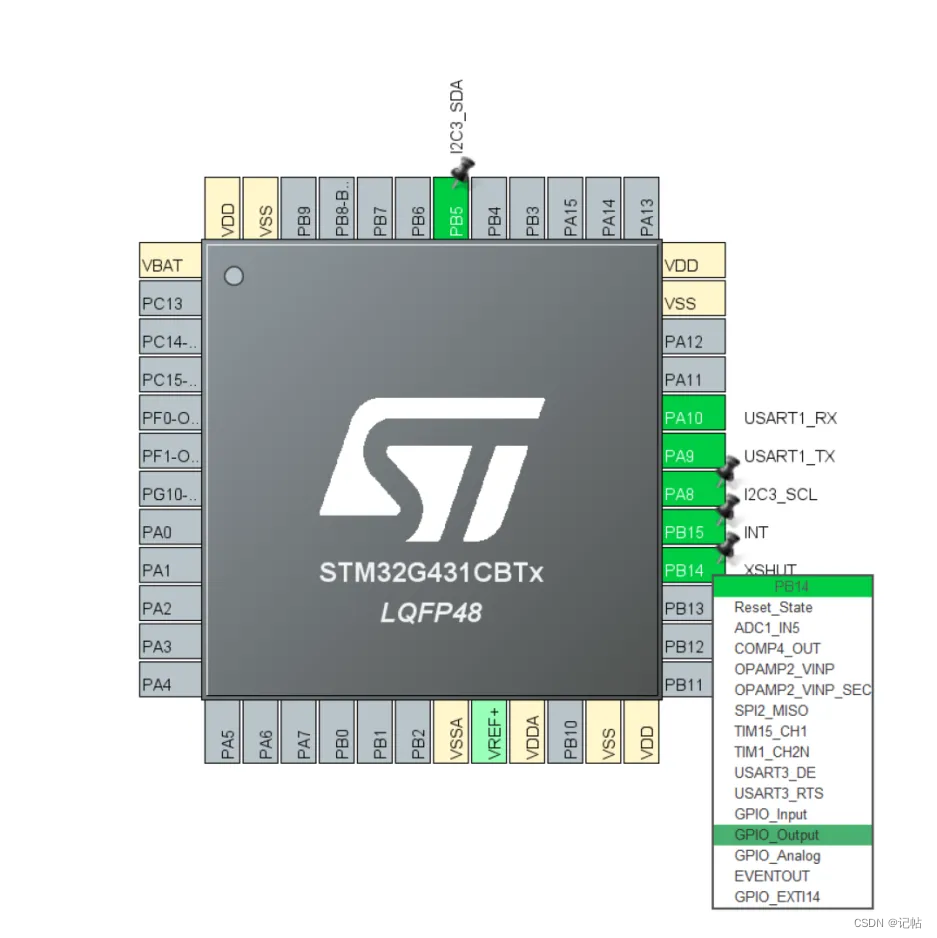
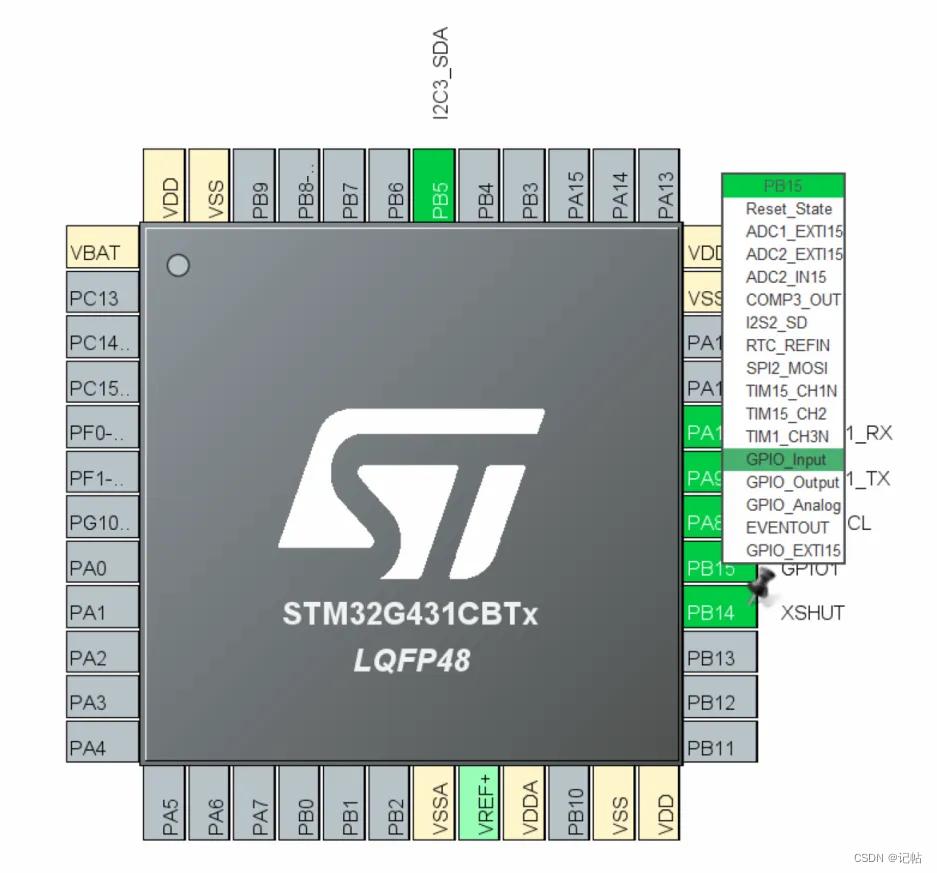
查看原理圖,PA9和PA10設置為開發(fā)板的串口。
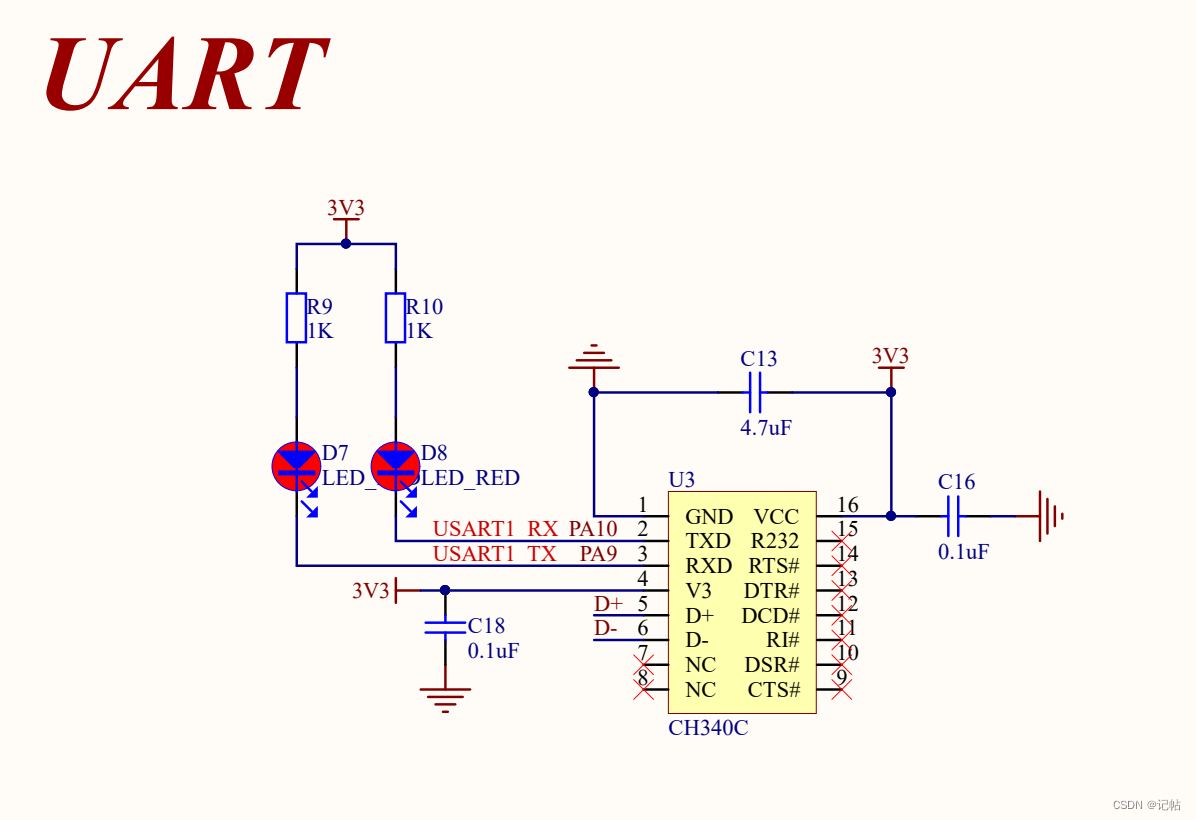
配置串口。
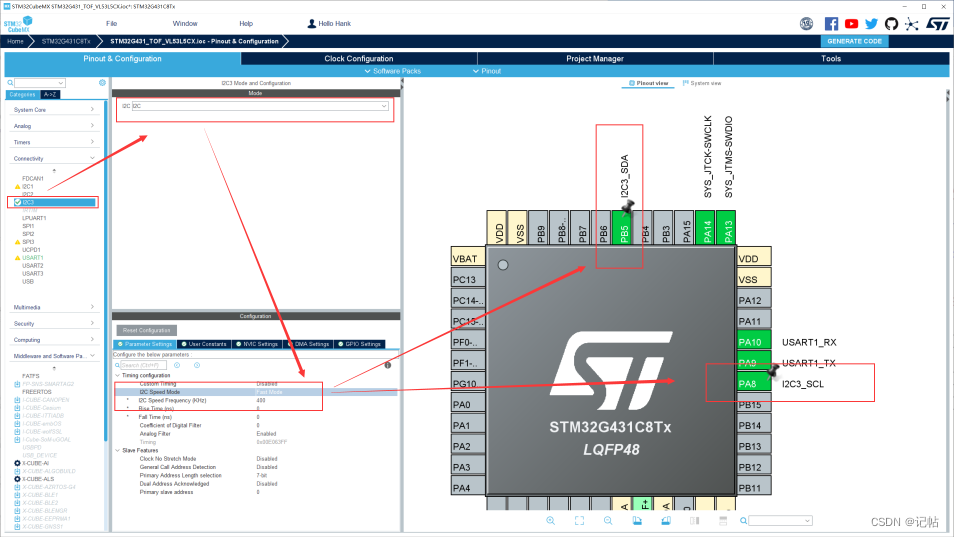
IIC配置
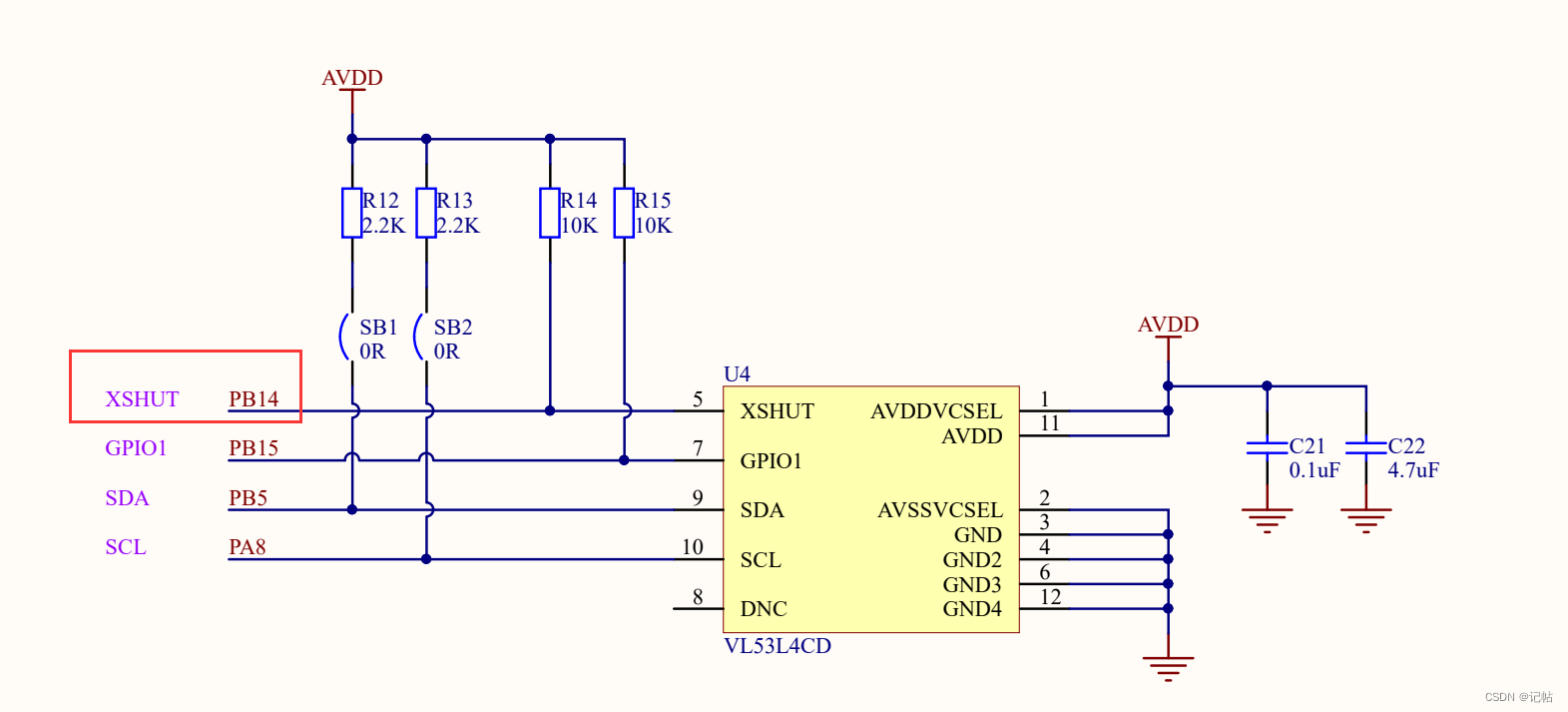
在這個應用中,VL53L4CD模塊通過I2C(IIC)接口與主控器通信。具體來說,VL53L4CD模塊的I2C引腳連接到主控器的PA8和PB5兩個IO口。
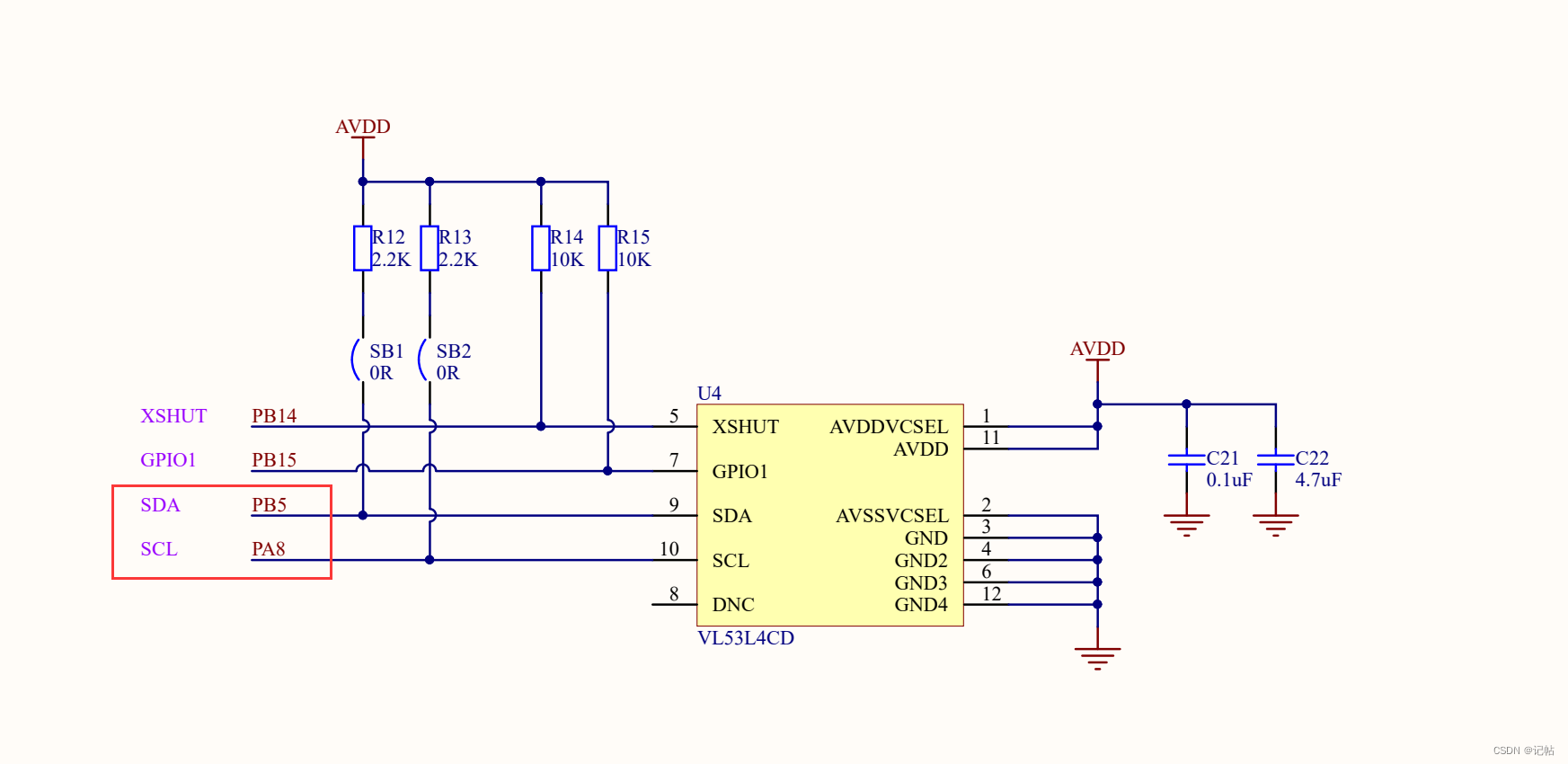
配置IIC為快速模式,速度為400k。
XSHUT
XSHUT引腳是由主機連接和控制的,這種設計優(yōu)化了功耗,因為設備在不使用時可以被完全關閉,然后通過主機使用XSHUT引腳來喚醒。當AVDD存在且XSHUT為低電平時,設備處于硬件待機模式(HW Standby mode)。如果XSHUT引腳不由主機控制,而是通過上拉電阻連接到AVDD,那么設備在固件啟動(FW BOOT)后會自動進入軟件待機(SW STANDBY),而不會進入硬件待機。
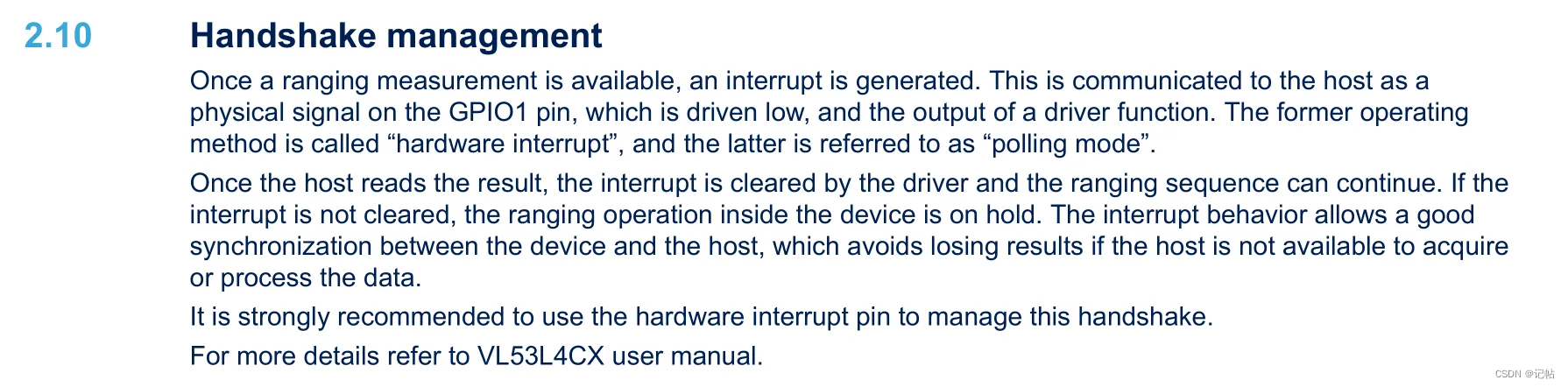
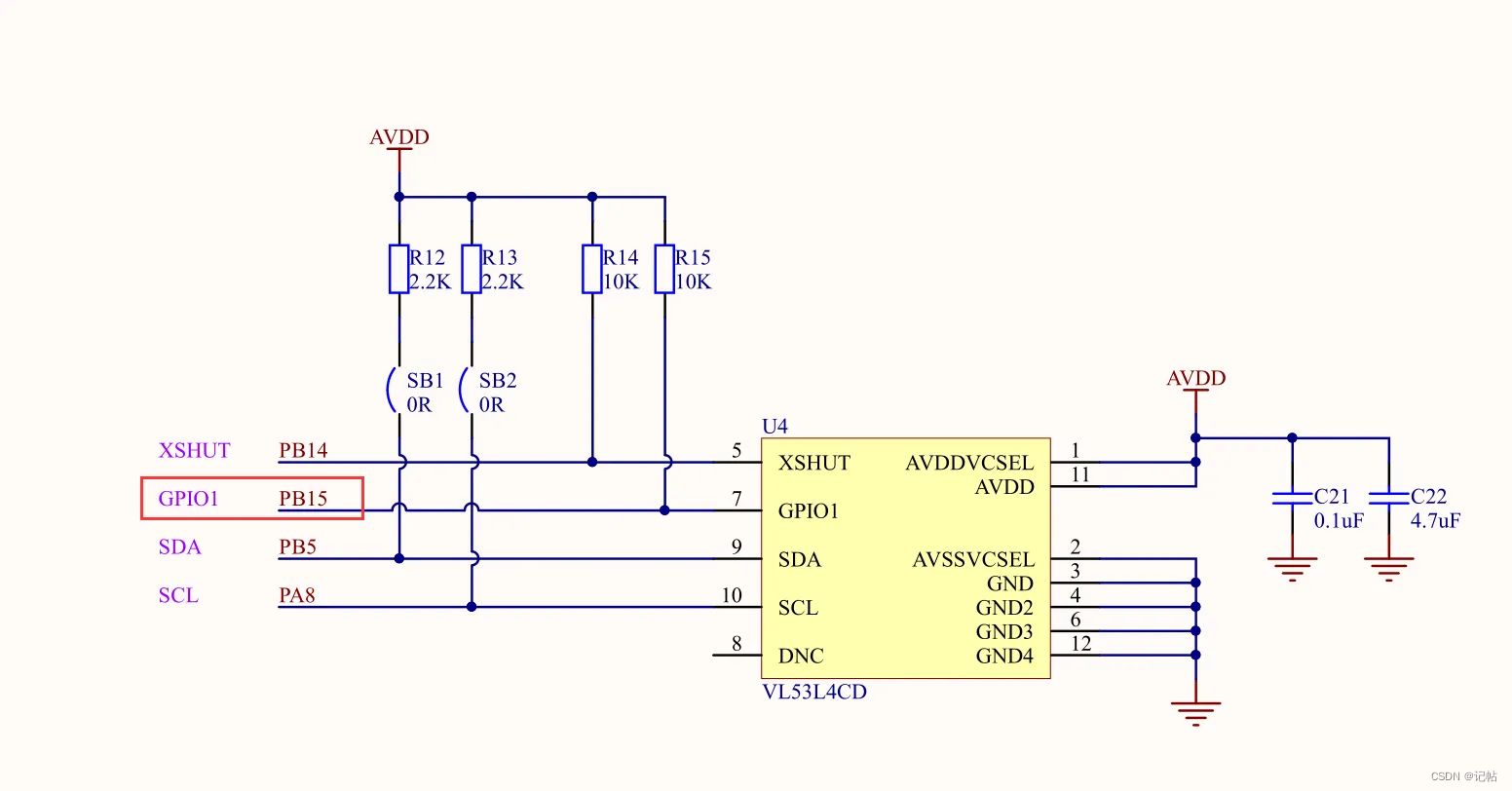
GPIO1
當傳感器完成一次測距操作時,GPIO1引腳可以被配置為輸出中斷信號,通知微控制器讀取測量結果。
這種方式比持續(xù)輪詢傳感器狀態(tài)更加高效,尤其在低功耗應用中非常有用。
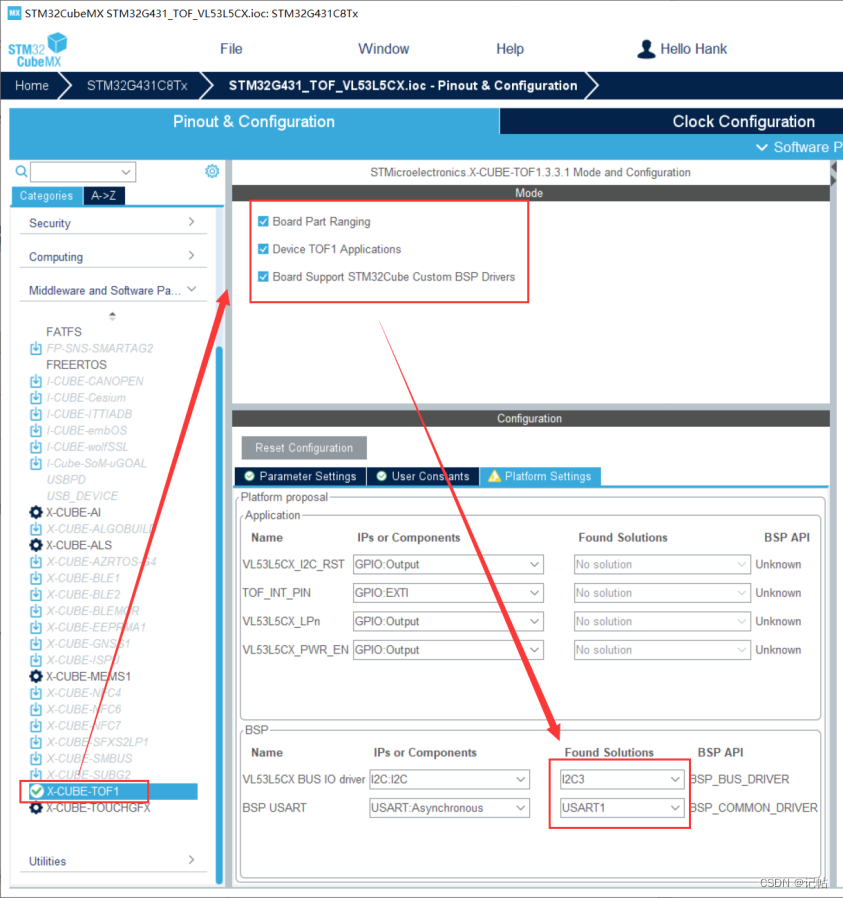
X-CUBE-TOF1
本節(jié)介紹在不需要使用樣例應用時如何使用STM32CubeMX將X-CUBE-TOF1軟件包添加到項目中。有了這樣的設置,就只配置了驅動層。
app_tof.c
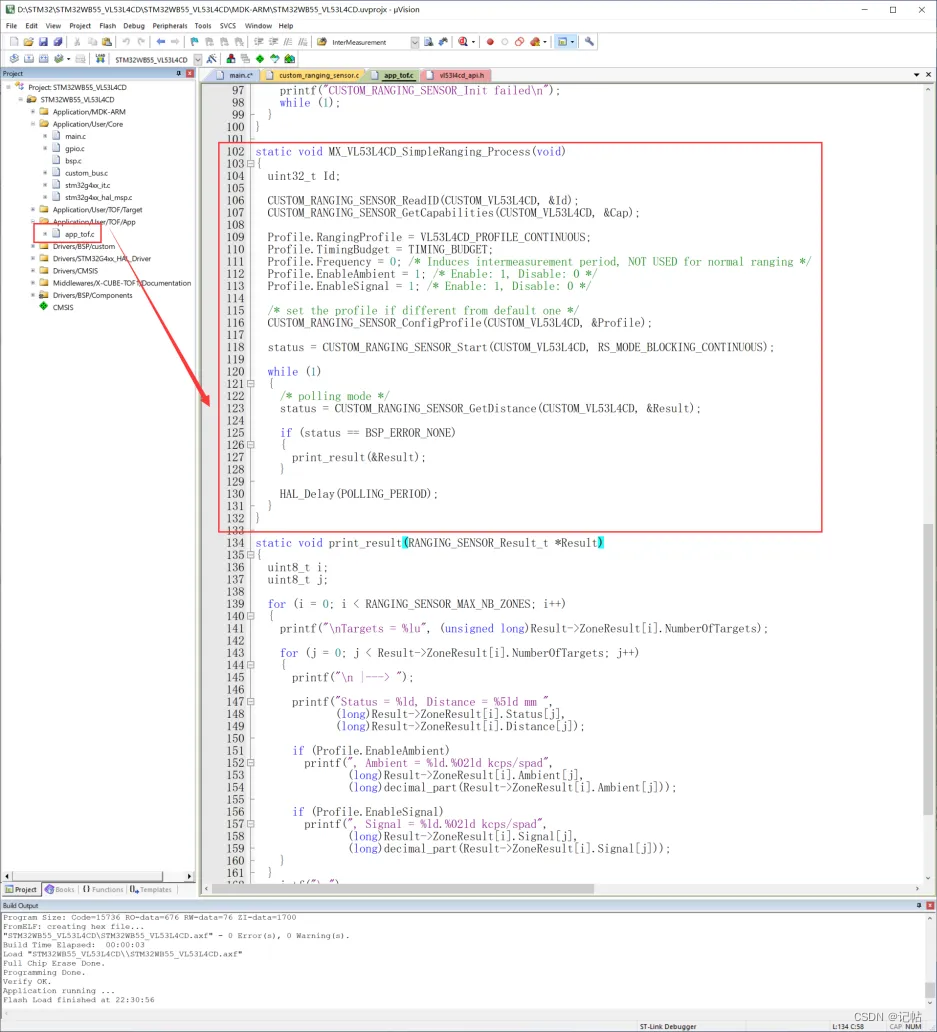
app_tof.c定義了一個靜態(tài)函數(shù) MX_VL53L4CD_SimpleRanging_Process,用于配置和執(zhí)行VL53L4CX傳感器的簡單測距操作。
詳細解釋
CUSTOM_RANGING_SENSOR_ReadID(CUSTOM_VL53L4CD, &Id);:
○ 讀取傳感器的ID,并將其存儲在變量 Id 中。
CUSTOM_RANGING_SENSOR_GetCapabilities(CUSTOM_VL53L4CD, &Cap);:
○ 獲取傳感器的能力,并將其存儲在 Cap 結構中。
配置 Profile 結構的參數(shù):
○ Profile.RangingProfile 設置測距模式。
○ Profile.TimingBudget 設置測量時間預算。
○ Profile.Frequency 設置為0,不用于正常測距。
○ Profile.EnableAmbient 啟用環(huán)境光測量。
○ Profile.EnableSignal 啟用信號測量。
CUSTOM_RANGING_SENSOR_ConfigProfile(CUSTOM_VL53L4CD, &Profile);:
○ 如果配置文件與默認配置不同,則應用新的配置文件。
CUSTOM_RANGING_SENSOR_Start(CUSTOM_VL53L4CD, RS_MODE_BLOCKING_CONTINUOUS);:
○ 啟動傳感器,設置為阻塞連續(xù)測量模式。
while (1) 循環(huán):
○ 在無限循環(huán)中,定期讀取傳感器的距離數(shù)據(jù)。
○ 如果成功讀取距離數(shù)據(jù),則調用 print_result(&Result) 打印結果。
○ 使用 HAL_Delay(POLLING_PERIOD) 延遲一段時間,以控制輪詢頻率。
main.c種添加頭文件。
/* USER CODE BEGIN Includes */ #include "app_tof.h" #include "custom_ranging_sensor.h" /* USER CODE END Includes */
添加對應變量。
/* USER CODE BEGIN 0 */ #define TIMING_BUDGET (200U) /* 8 ms < TimingBudget < 200 ms */ #define POLLING_PERIOD (250U) /* refresh rate for polling mode (ms, shall be consistent with TimingBudget value) */ static RANGING_SENSOR_Capabilities_t Cap; static RANGING_SENSOR_ProfileConfig_t Profile; static RANGING_SENSOR_Result_t Result; static int32_t status = 0; static void print_result(RANGING_SENSOR_Result_t *Result); static int32_t decimal_part(float_t x); /* USER CODE END 0 */
測量頻率修改
增加計時預算會增加單次測量發(fā)射的光子數(shù)量。這提高了測量精度和最大測距距離。
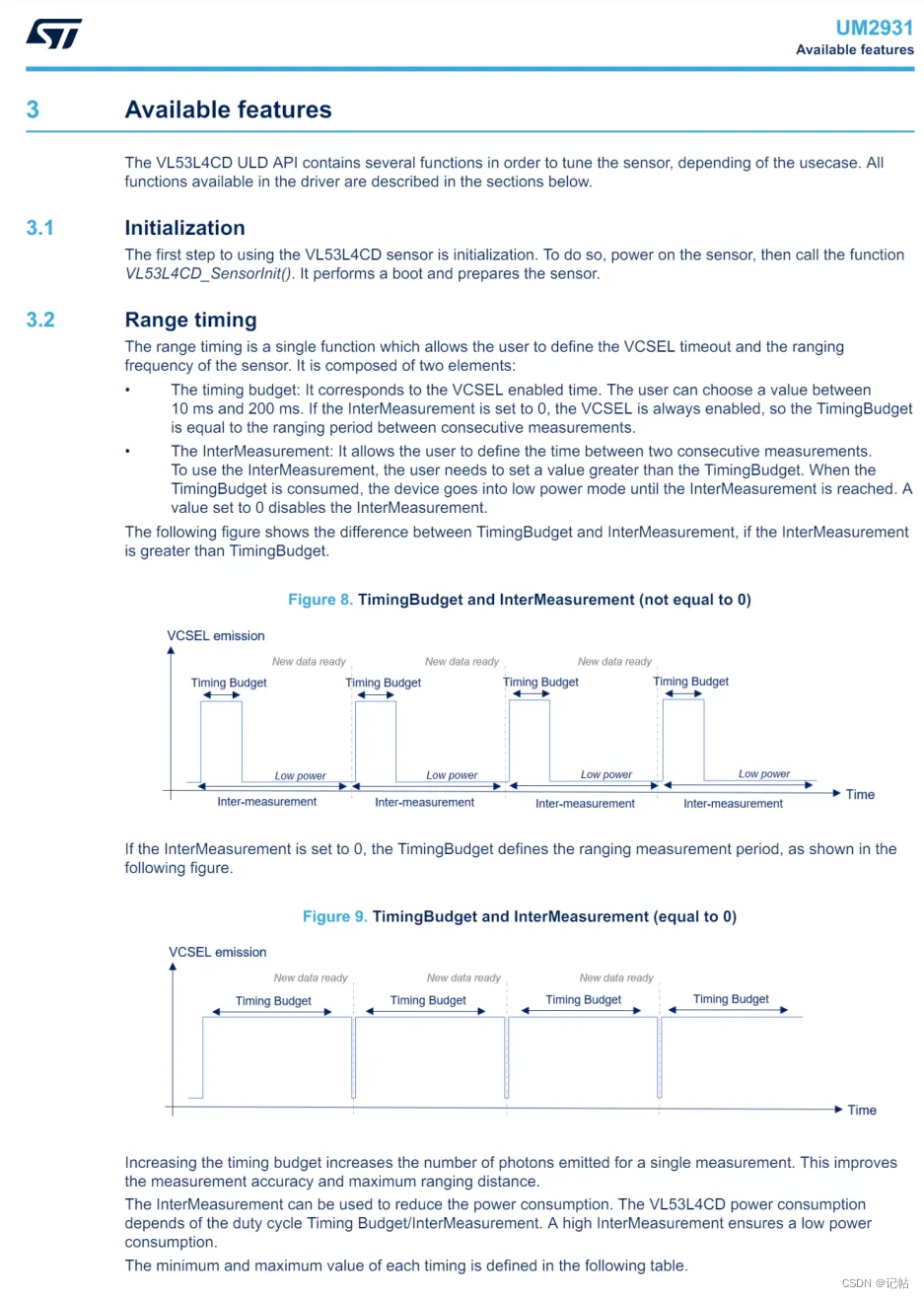
Profile.TimingBudget 設置測量時間預算,初始化代碼如下所示,TIMING_BUDGET設置為200ms。
/* USER CODE BEGIN 2 */ uint32_t Id; CUSTOM_RANGING_SENSOR_ReadID(CUSTOM_VL53L4CD, &Id);// 讀取傳感器ID并存儲在Id變量中 CUSTOM_RANGING_SENSOR_GetCapabilities(CUSTOM_VL53L4CD, &Cap);// 獲取傳感器的能力并存儲在Cap變量中 Profile.RangingProfile = VL53L4CD_PROFILE_CONTINUOUS;// 設置測距配置文件為連續(xù)測距模式 Profile.TimingBudget = TIMING_BUDGET;// 設置測距的時間預算(以毫秒為單位) Profile.Frequency = 0; // 設置測量頻率為0,這意味著使用測量之間的間隔時間,而不是連續(xù)測量 Profile.EnableAmbient = 1; // 啟用環(huán)境光測量 Profile.EnableSignal = 1; // 啟用信號測量 // 如果配置文件與默認配置文件不同,則應用新的配置文件 CUSTOM_RANGING_SENSOR_ConfigProfile(CUSTOM_VL53L4CD, &Profile); // 啟動傳感器進行阻塞連續(xù)測距模式測量 status = CUSTOM_RANGING_SENSOR_Start(CUSTOM_VL53L4CD, RS_MODE_BLOCKING_CONTINUOUS); /* USER CODE END 2 */
主程序如下所示,可以通過判斷GPIO1來判定信號是否已經(jīng)準備好。
/* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { if(HAL_GPIO_ReadPin ( GPIOB, GPIO_PIN_15) ==0) { /* polling mode */ status = CUSTOM_RANGING_SENSOR_GetDistance(CUSTOM_VL53L4CD, &Result); if (status == BSP_ERROR_NONE) { print_result(&Result); } } /* USER CODE END WHILE */ // MX_TOF_Process(); /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */
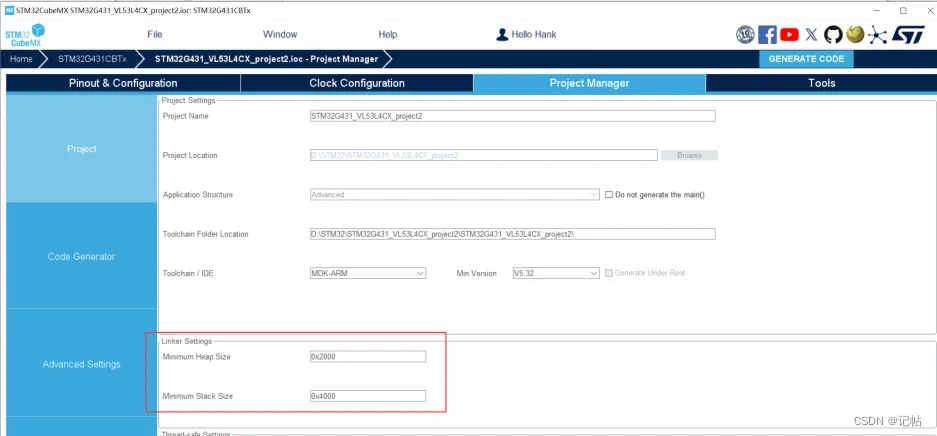
若無法正常打印,需要修改堆棧。
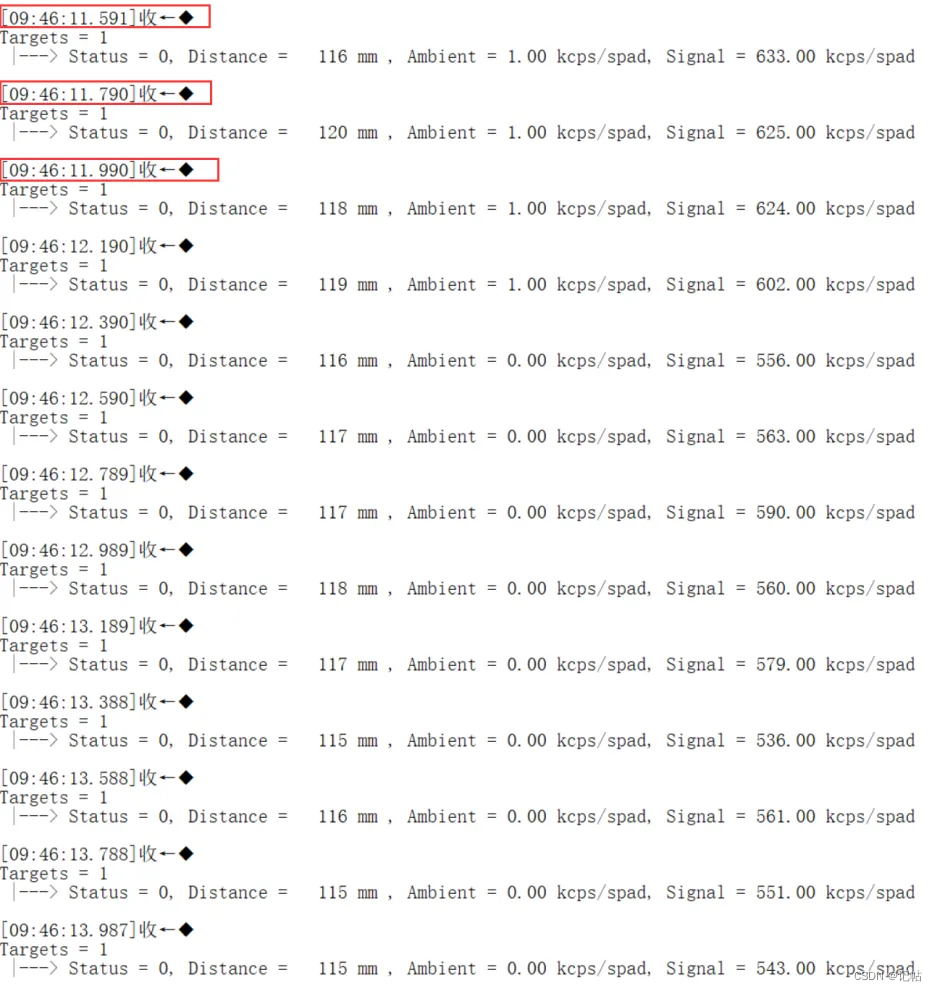
此時時間為200ms輸出一次,頻率為5Hz。
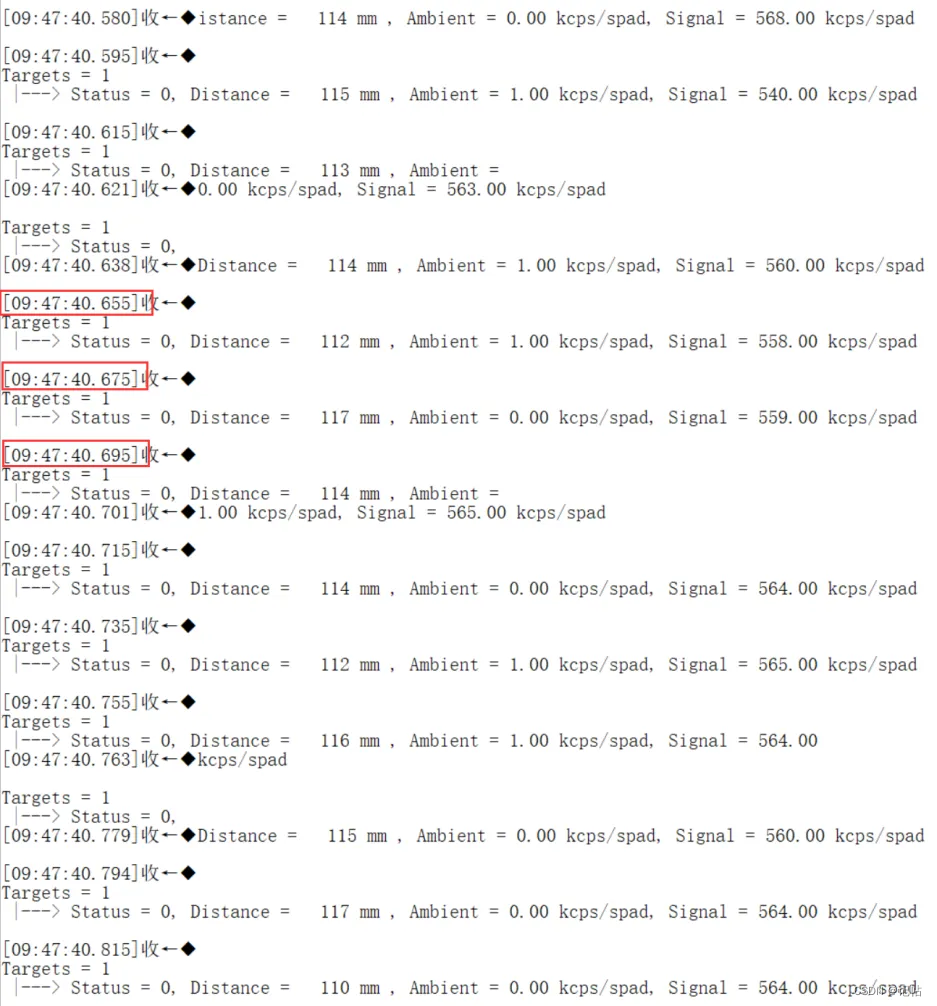
修改TIMING_BUDGET為20,此時為20ms刷新一次,頻率為50Hz,此時數(shù)據(jù)抖動較大。
審核編輯 黃宇
-
測量
+關注
關注
10文章
4849瀏覽量
111238 -
測距
+關注
關注
2文章
105瀏覽量
19636 -
TOF
+關注
關注
9文章
482瀏覽量
36331 -
stm32cubemx
+關注
關注
5文章
283瀏覽量
14791
發(fā)布評論請先 登錄
相關推薦
基于STM32CUBEMX驅動TOF模塊VL53l0x(2)----修改設備地址
VL53L4CD TOF開發(fā)(1)----驅動TOF進行測距
VL53L8CX TOF開發(fā)(1)----驅動TOF進行區(qū)域檢測
VL53L4CD TOF開發(fā)(3)----檢測閾值
VL53L4CD TOF開發(fā)(4)----單次測量(One-Shot)模式
VL53L1CB TOF開發(fā)(1)----驅動TOF進行測距

VL53L4CD液位監(jiān)測(2)----液位檢測
新一代ToF 激光測距模塊VL53L0X
VL53L1X簡介
RT-Thread VL53L0X TOF傳感器驅動設計資料實現(xiàn)
VL53L4CD能否實現(xiàn)~50uA@1Hz類似的功耗?
微雪電子VL53L1X測距傳感器4米VL53L1X測距模塊簡介
VL53L4CX TOF開發(fā)(2)----修改測距范圍及測量頻率
意法半導體發(fā)布單區(qū)直接ToF傳感器VL53L4ED
VL53L4CD液位監(jiān)測(1)----驅動TOF進行測距





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論