") 伺服電機(jī)的工作原理、特點(diǎn)及電路圖
伺服電機(jī)的工作原理、特點(diǎn)及電路圖
一、什么是伺服電機(jī)?
伺服電機(jī)是指在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。它能夠?qū)㈦妷?a target="_blank">信號(hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動(dòng)控制對(duì)象,從而實(shí)現(xiàn)對(duì)機(jī)械運(yùn)動(dòng)的精確控制。伺服電機(jī)主要由電機(jī)本體、驅(qū)動(dòng)器和控制電路等部分組成,其中電機(jī)本體是實(shí)現(xiàn)機(jī)械運(yùn)動(dòng)的執(zhí)行機(jī)構(gòu),驅(qū)動(dòng)器負(fù)責(zé)接收控制信號(hào)并驅(qū)動(dòng)電機(jī)轉(zhuǎn)動(dòng),控制電路則負(fù)責(zé)生成控制信號(hào)并監(jiān)控電機(jī)的運(yùn)行狀態(tài)。
伺服電機(jī)可以控制速度,位置精度非常準(zhǔn)確,可以將電壓信號(hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動(dòng)控制對(duì)象。伺服電機(jī)轉(zhuǎn)子轉(zhuǎn)速受輸入信號(hào)控制,并能快速反應(yīng),在自動(dòng)控制系統(tǒng)中,用作執(zhí)行元件,且具有機(jī)電時(shí)間常數(shù)小、線性度高等特性,可把所收到的電信號(hào)轉(zhuǎn)換成電動(dòng)機(jī)軸上的角位移或角速度輸出。分為直流和交流伺服電動(dòng)機(jī)兩大類,其主要特點(diǎn)是,當(dāng)信號(hào)電壓為零時(shí)無(wú)自轉(zhuǎn)現(xiàn)象,轉(zhuǎn)速隨著轉(zhuǎn)矩的增加而勻速下降。
伺服電機(jī)廣泛應(yīng)用于各種需要精準(zhǔn)控制運(yùn)動(dòng)的場(chǎng)合,如工業(yè)自動(dòng)化、機(jī)器人、數(shù)控機(jī)床、醫(yī)療設(shè)備、航空航天等領(lǐng)域。在工業(yè)自動(dòng)化領(lǐng)域,伺服電機(jī)被用于驅(qū)動(dòng)各種自動(dòng)化設(shè)備,如傳送帶、包裝機(jī)械、印刷設(shè)備等。在機(jī)器人領(lǐng)域,伺服電機(jī)是機(jī)器人關(guān)節(jié)驅(qū)動(dòng)的核心部件,能夠?qū)崿F(xiàn)機(jī)器人的靈活運(yùn)動(dòng)和準(zhǔn)確定位。在醫(yī)療設(shè)備領(lǐng)域,伺服電機(jī)被用于驅(qū)動(dòng)各種精密醫(yī)療設(shè)備,如手術(shù)機(jī)器人、醫(yī)療影像設(shè)備等。
二、伺服電機(jī)的工作原理
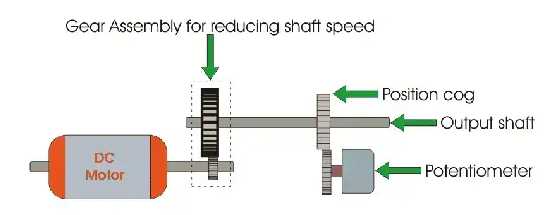
伺服電機(jī)被定義為能夠精確控制位置(角度)、速度和加速度的執(zhí)行器。典型的伺服電機(jī)由三個(gè)主要部件組成:直流電機(jī)、控制電路和反饋裝置。
直流電機(jī)為伺服系統(tǒng)提供動(dòng)力,并連接到齒輪,以降低速度并增加輸出軸上的扭矩。
輸出軸是伺服器中旋轉(zhuǎn)并移動(dòng)負(fù)載的部分。
控制電路負(fù)責(zé)接收和處理來(lái)自外部控制器的輸入信號(hào)。這些信號(hào)告訴伺服系統(tǒng)要移動(dòng)到什么位置、速度或方向。控制電路還向直流電機(jī)發(fā)送電力以驅(qū)動(dòng)它。
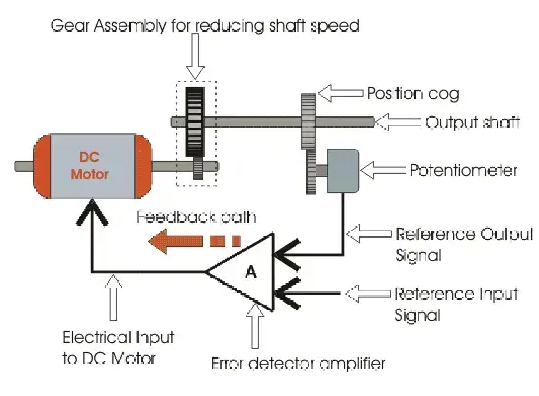
反饋裝置通常是測(cè)量輸出軸當(dāng)前位置的電位器或編碼器。
反饋設(shè)備將位置數(shù)據(jù)轉(zhuǎn)發(fā)回控制電路,然后控制電路調(diào)整直流電機(jī)的功率,使實(shí)際位置與輸入信號(hào)中的所需位置對(duì)齊。
控制電路和反饋裝置之間的反饋回路保證舵機(jī)能夠準(zhǔn)確地運(yùn)動(dòng)到并保持在其運(yùn)動(dòng)范圍內(nèi)的任何位置。
三、伺服電機(jī)的特點(diǎn)
伺服電機(jī)(Servo Motor)是一種能夠精確控制位置、速度和加速度的電機(jī)系統(tǒng),廣泛應(yīng)用于需要高精度定位、快速響應(yīng)和穩(wěn)定性能的工業(yè)自動(dòng)化、機(jī)器人技術(shù)、精密加工設(shè)備等領(lǐng)域。以下是關(guān)于伺服電機(jī)的特點(diǎn)介紹:
高精度定位:伺服電機(jī)系統(tǒng)通常配備高分辨率的編碼器或解析器,用于實(shí)時(shí)監(jiān)測(cè)電機(jī)的位置和速度。這使得伺服電機(jī)能夠?qū)崿F(xiàn)非常精確的位置控制,滿足各種高精度應(yīng)用的需求。
快速響應(yīng):伺服電機(jī)具有出色的動(dòng)態(tài)性能,能夠快速響應(yīng)控制信號(hào)的變化。當(dāng)接收到控制指令時(shí),伺服電機(jī)能夠迅速調(diào)整其轉(zhuǎn)速和位置,以滿足系統(tǒng)對(duì)速度和位置控制的需求。
高穩(wěn)定性:伺服電機(jī)系統(tǒng)通常使用閉環(huán)控制,這意味著電機(jī)能夠不斷地監(jiān)測(cè)其實(shí)際位置和速度,并與目標(biāo)值進(jìn)行比較和調(diào)整。這種閉環(huán)控制使得伺服電機(jī)具有很高的穩(wěn)定性,能夠在各種負(fù)載和環(huán)境條件下保持穩(wěn)定的性能。
寬調(diào)速范圍:伺服電機(jī)通常具有較寬的調(diào)速范圍,可以適應(yīng)不同的應(yīng)用需求。無(wú)論是需要高速旋轉(zhuǎn)還是低速精密定位的場(chǎng)合,伺服電機(jī)都能夠提供適當(dāng)?shù)乃俣群臀恢每刂啤?/p>
大扭矩輸出:伺服電機(jī)能夠輸出較大的扭矩,特別是在低速時(shí)。這使得伺服電機(jī)在需要高扭矩輸出的應(yīng)用場(chǎng)合中具有很大的優(yōu)勢(shì),如機(jī)器人手臂、精密加工設(shè)備等。
良好的可靠性:伺服電機(jī)采用高質(zhì)量的材料和先進(jìn)的制造工藝,具有很高的可靠性。同時(shí),伺服電機(jī)系統(tǒng)通常配備有各種保護(hù)和故障診斷功能,以確保在出現(xiàn)異常情況時(shí)能夠及時(shí)發(fā)現(xiàn)并解決問(wèn)題。
易于集成:伺服電機(jī)系統(tǒng)通常具有標(biāo)準(zhǔn)化的接口和通信協(xié)議,使得它們易于與其他設(shè)備和系統(tǒng)進(jìn)行集成。這有助于簡(jiǎn)化整個(gè)系統(tǒng)的設(shè)計(jì)和實(shí)現(xiàn)過(guò)程,提高系統(tǒng)的整體性能和可靠性。
低維護(hù)成本:由于伺服電機(jī)系統(tǒng)具有較高的可靠性和穩(wěn)定性,因此它們的維護(hù)成本相對(duì)較低。此外,許多伺服電機(jī)系統(tǒng)還配備了遠(yuǎn)程監(jiān)控和診斷功能,可以進(jìn)一步降低維護(hù)成本和停機(jī)時(shí)間。
總之,伺服電機(jī)以其高精度定位、快速響應(yīng)、高穩(wěn)定性、寬調(diào)速范圍、大扭矩輸出、良好的可靠性、易于集成和低維護(hù)成本等特點(diǎn),在各種需要高精度控制的應(yīng)用場(chǎng)合中發(fā)揮著重要作用。
四、如何控制伺服電機(jī)?
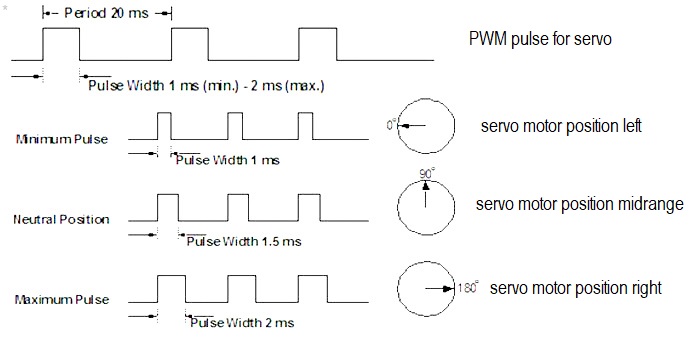
通過(guò)向伺服信號(hào)線發(fā)送 PWM(脈寬調(diào)制)信號(hào)來(lái)控制伺服電機(jī)。 PWM 是一種快速打開(kāi)和關(guān)閉信號(hào)以產(chǎn)生不同寬度脈沖的技術(shù)。脈沖寬度決定輸出軸的位置。
例如,當(dāng)您發(fā)送脈沖寬度為 1.5 毫秒 (ms) 的 PWM 信號(hào)時(shí),舵機(jī)將移至中立位置(90 度)。
當(dāng)發(fā)送脈沖寬度為1ms的PWM信號(hào)時(shí),舵機(jī)將移動(dòng)到最小位置(0度)。當(dāng)發(fā)送脈沖寬度為2ms的PWM信號(hào)時(shí),舵機(jī)將移動(dòng)到最大位置(180度)。
PWM 信號(hào)的頻率為 50 Hz,這意味著它每 20 ms 重復(fù)一次。在此期間,脈沖寬度可以在 1 ms 到 2 ms 之間變化。
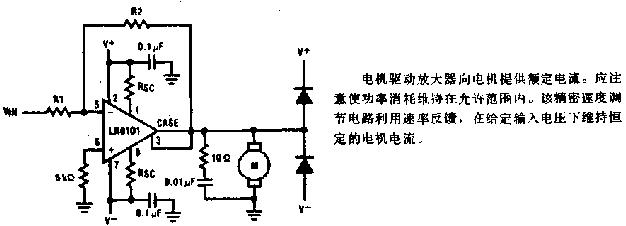
五、伺服電機(jī)驅(qū)動(dòng)電路圖
在本教程中,我們將制作一個(gè)“伺服電機(jī)驅(qū)動(dòng)電路”。伺服電機(jī)是一種小型電子元件,有助于以精確的精度旋轉(zhuǎn)或推動(dòng)機(jī)器或設(shè)備的任何部分。與通用直流電機(jī)不同,我們可以控制伺服電機(jī)的角度,因此用途廣泛。這些電機(jī)用于精確控制角度或線性位置、速度和加速度。也稱為旋轉(zhuǎn)執(zhí)行器或線性執(zhí)行器。伺服電機(jī)可能由用于位置反饋的傳感器和用于位置控制的信號(hào)輸入組成。這些電機(jī)有不同的尺寸和額定電壓。伺服電機(jī)控制器電路用于控制伺服電機(jī)的位置,這里我們構(gòu)建了用于亞微型伺服電機(jī)的伺服電機(jī)驅(qū)動(dòng)電路。
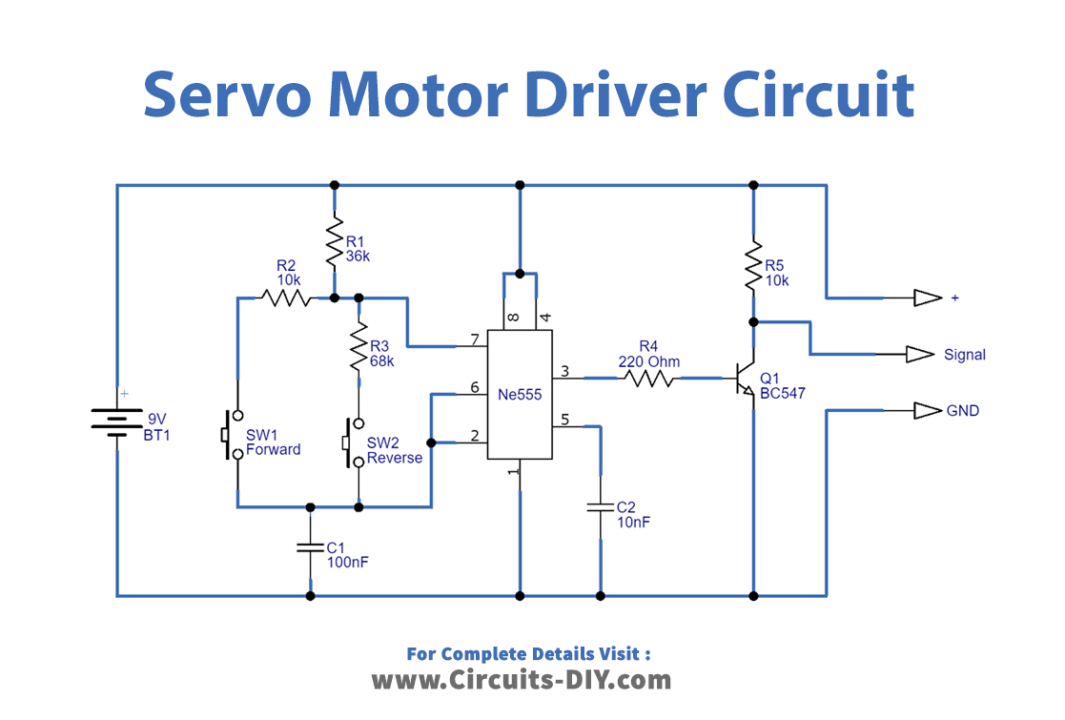
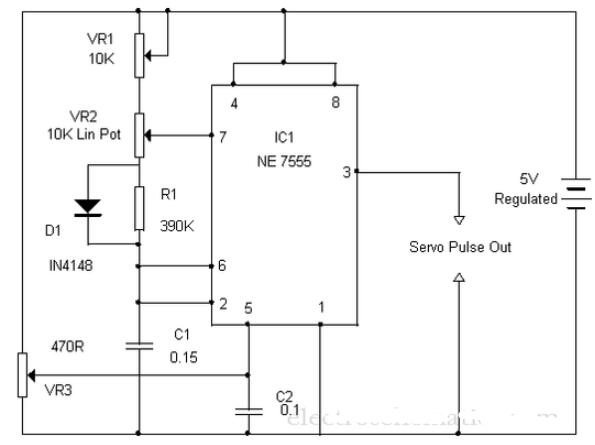
該電路旨在通過(guò)使用不同占空比的 PWM 脈沖來(lái)提供 PWM(脈沖寬度調(diào)制)信號(hào)輸出。我們可以通過(guò)使用微控制器內(nèi)部的 PWM 模塊或定時(shí)器來(lái)控制伺服電機(jī)的旋轉(zhuǎn)和位置。這里我們使用定時(shí)器 IC 555 來(lái)生成 PWM。一旦觸發(fā) PWM 模塊 (IC 555),所選 PWM 通道引腳就會(huì)變高(邏輯 1)。達(dá)到所需寬度后,它將變低(邏輯 0)。因此,觸發(fā) PWM 后,必須啟動(dòng)一個(gè)延遲特定 ms 的定時(shí)器,并等待定時(shí)器溢出。
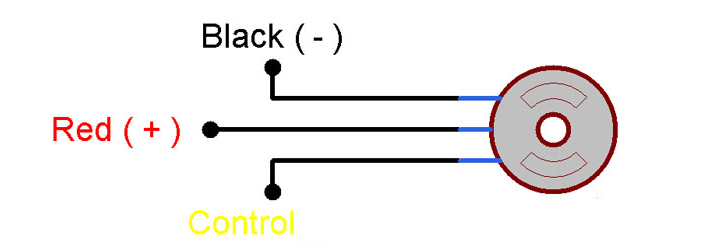
每個(gè)伺服電機(jī)都有三個(gè)端子,一個(gè)用于正極電源,另一個(gè)用于接地電源,一個(gè)用于位置控制信號(hào)輸入。
為了驅(qū)動(dòng)電機(jī),我們首先需要 PWM 脈沖,這就是我們使用 555 定時(shí)器 IC 的原因。而晶體管在電路中的作用是放大信號(hào)。要了解基于 PWM 信號(hào)的伺服旋轉(zhuǎn),請(qǐng)考慮周期為 20ms、高電平脈沖持續(xù)時(shí)間為 1ms(最小值)和 2ms(最大值)的信號(hào)。根據(jù)高脈沖信號(hào)的持續(xù)時(shí)間,伺服電機(jī)的旋轉(zhuǎn)會(huì)發(fā)生變化。
正如我們?cè)陔娐分锌吹降模〞r(shí)器 IC 555 被用作非穩(wěn)態(tài)多諧振蕩器。它在輸出端產(chǎn)生具有兩種不同脈沖持續(xù)時(shí)間的脈沖,我們知道555中輸出脈沖的時(shí)間取決于定時(shí)電阻和定時(shí)電容。對(duì)于輸出,我們將 Vcc 線連接到 Vcc、GND 與地,并將 PWM 線連接到晶體管的集電極側(cè)。此外,我們?cè)谟|發(fā)器和閾值引腳處連接開(kāi)關(guān)。
所以,當(dāng)我們施加電壓并按下任何開(kāi)關(guān)時(shí)。 IC 被觸發(fā),閾值引腳將施加的電壓與 2/3 Vcc 的參考電壓進(jìn)行比較。當(dāng)我們按下開(kāi)關(guān) SW1 時(shí),IC 會(huì)產(chǎn)生一個(gè)長(zhǎng)持續(xù)時(shí)間的高脈沖。該高脈沖時(shí)間將等于 0.693*(R1 + R2) C1,低脈沖時(shí)間將等于 0.693R2C1。在這種情況下,舵機(jī)以正確的方向旋轉(zhuǎn)。當(dāng)我們按下開(kāi)關(guān) SW2 時(shí),該 IC 會(huì)產(chǎn)生一個(gè)短時(shí)高脈沖。該高脈沖時(shí)間將等于 0.693(R1 + R3) C1,低脈沖時(shí)間將等于 0.693R3C1。在這種情況下,舵機(jī)向左方向旋轉(zhuǎn)。根據(jù)輸出脈沖占空比,伺服電機(jī)的旋轉(zhuǎn)方向和速度會(huì)發(fā)生變化。
-
驅(qū)動(dòng)器
+關(guān)注
關(guān)注
52文章
8226瀏覽量
146253 -
直流電機(jī)
+關(guān)注
關(guān)注
36文章
1710瀏覽量
70157 -
伺服電機(jī)
+關(guān)注
關(guān)注
85文章
2044瀏覽量
57810
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
交流伺服電機(jī)的工作原理
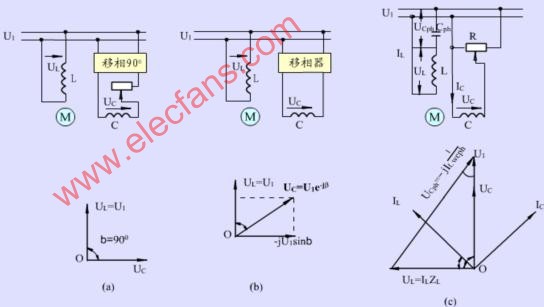
交流伺服電機(jī)的工作原理
光控電路圖工作原理
伺服電機(jī)的引腳圖/工作原理/應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論