 什么是步進電機控制器?步進電機控制器電路圖
什么是步進電機控制器?步進電機控制器電路圖
步進電機控制器是一種專門用于控制步進電機運行的裝置。步進電機是一種將電脈沖信號轉變為角位移或線位移的開環控制元件,其運行需要由步進電機控制器產生的脈沖信號來進行驅動。這些脈沖信號不僅決定了步進電機的轉動方向,還決定了其轉動的速度和位置。
步進電機控制器通常具備以下功能:
脈沖生成:步進電機控制器能夠生成一系列的電脈沖信號,這些信號被用來驅動步進電機進行旋轉。脈沖的頻率決定了電機的轉速,而脈沖的數量則決定了電機轉動的角度。
方向控制:通過改變脈沖信號的順序或極性,步進電機控制器可以控制電機的旋轉方向。
細分控制:為了提高步進電機的精度和減小步距角,步進電機控制器通常支持細分控制。這意味著每個脈沖可以使電機轉動更小的角度,從而實現更精細的位置控制。
加減速控制:為了避免步進電機在啟動和停止時產生過大的沖擊和振動,步進電機控制器通常具備加減速控制功能。它可以根據需要調整脈沖信號的頻率,使電機在啟動和停止時能夠平穩地過渡。
保護功能:步進電機控制器還具備一些保護功能,如過流保護、過熱保護等,以確保電機在異常情況下能夠安全地停止運行。
步進電機控制器廣泛應用于各種需要精確控制位置和速度的領域,如自動化設備、機器人、數控機床、醫療設備、包裝機械等。隨著技術的不斷發展,步進電機控制器的性能也在不斷提高,功能越來越豐富,控制精度也越來越高。
二、步進電機控制器電路圖
1、 簡單的步進電機控制器電路圖
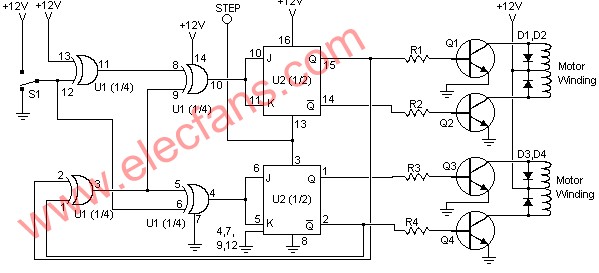
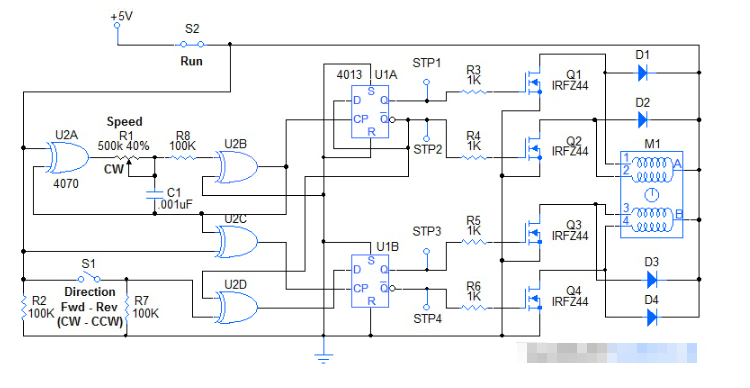
這是僅使用基本部件的簡單步進電機控制器的電路圖。驅動電路使用四個晶體管(SL100)驅動電機繞組,兩個非門和一個異或門解碼兩位控制邏輯來驅動電機的四個繞組。二極管D1至D4保護相應的晶體管免受電機繞組切換期間產生的瞬變的影響。 d0 和 d1 是確定旋轉方向和速度的控制邏輯。

該電路的控制邏輯可以從由555非穩態多諧振蕩器提供時鐘的2位向上/向下計數器獲得。計數方向決定旋轉方向,非穩態多諧振蕩器的頻率決定旋轉速度。
如上圖所示,IC1a IC1b 屬于同一個 IC 7404。 IC1和IC2的引腳14和引腳7必須分別連接至+5V和地,盡管電路圖中未示出。5V可以從基于7805的電源電路獲得。
Vcc是步進電機所需的電壓。它因電機而異。這里我們可以使用最高24V的步進電機。為了獲得更高的工作電壓和功率,必須將 SL100 晶體管替換為更高功率的晶體管,例如 2N3055。
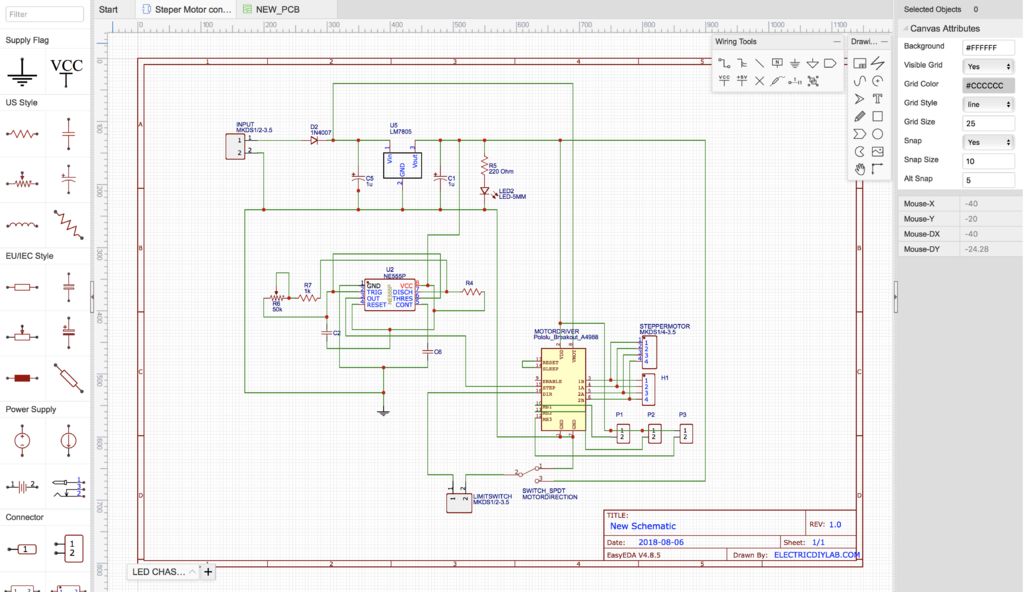
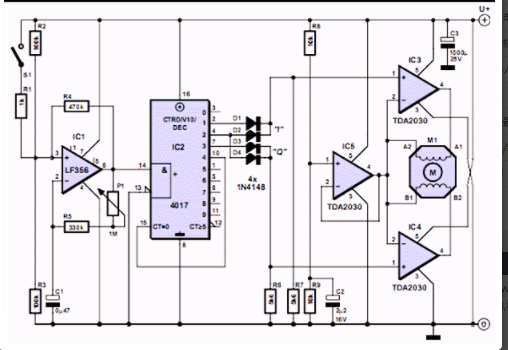
2、基于555定時器的步進電機控制器電路圖
簡單的555定時器步進電機控制器電路采用少量易于使用的組件進行設計。該電路使步進電機連續驅動,沒有任何中斷或步進停止。通過使用該電路,我們可以驅動具有不同額定電壓的單極步進電機。請記住,該電路僅使用 9V 電源,并且能夠驅動 12V 以下的步進電機。如果要驅動高于 12V 的步進電機,請為步進電機和功率開關晶體管添加外部電源。
該電路有兩部分,一部分用于產生方波脈沖振蕩,另一部分用于向步進電機提供步進脈沖。
步進電機
我們知道步進電機也稱為步進電機,大多數是無刷直流電機,將其整個旋轉分成多個相等的步數,該電機可用于不同的應用,如3D打印機、數控機床、自動門等..,
這種步進電機根據定子繞組基本上分為兩類,
雙極步進電機
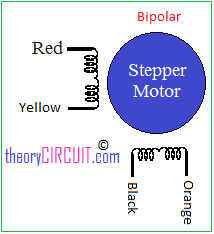
雙極步進電機每相只有一個繞組,只有4根引線連接兩組內部電磁鐵線圈,可以通過改變通過電機線圈的電流方向來實現正向和反向步進,這可能比單極更復雜,但H-電橋和步進電機驅動電路使其變得非常簡單。
單極步進電機
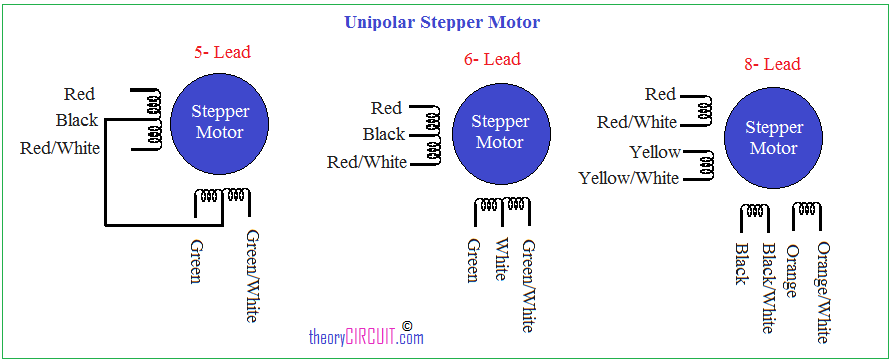
單極配有 5、6 和 8 根引線,并通過每相輸入的中心抽頭運行一個繞組。此圖顯示了不同類型的單極步進電機及其引線配置,請參閱步進電機的數據表以了解更多信息。
電路原理圖
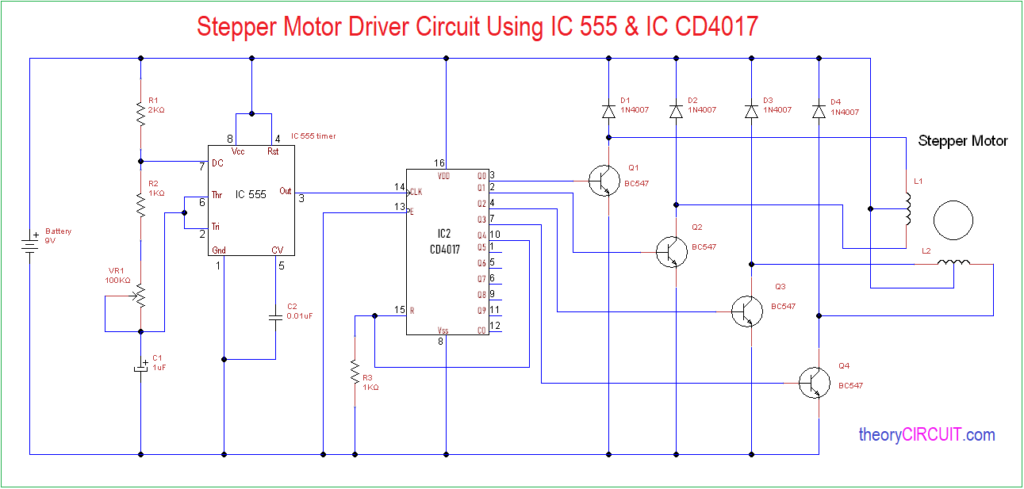
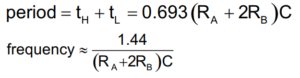
這里,定時器IC 555用作非穩態多諧振蕩器,并基于定時電阻器和定時電容器振蕩方波脈沖。
第二級是十進制計數器IC CD4017級,該集成電路對來自定時器IC的方波脈沖進行計數,并通過Q0、Q1、Q2和Q3輸出引腳提供步進脈沖輸出,每個脈沖通過開關晶體管BC547饋送到步進電機線圈。
-
電路圖
+關注
關注
10370文章
10726瀏覽量
535687 -
步進電機
+關注
關注
152文章
3132瀏覽量
148282 -
步進電機控制器
+關注
關注
1文章
19瀏覽量
6483
發布評論請先 登錄
相關推薦
如何使用FPGA實現步進電機控制器








 工商網監
工商網監
評論