") 利用全卷積神經(jīng)網(wǎng)絡(luò)生成多深度三維全息
利用全卷積神經(jīng)網(wǎng)絡(luò)生成多深度三維全息
空間光調(diào)制器是一種在主動(dòng)控制下利用自身屬性對(duì)輸入光的振幅、相位等參量做調(diào)制輸出的光學(xué)器件,通過(guò)對(duì)光波波前、光波波束進(jìn)行量化及指向性的控制,在最終接受面獲得預(yù)期的光場(chǎng)分布。將空間光調(diào)制器應(yīng)用在光學(xué)神經(jīng)網(wǎng)絡(luò)已經(jīng)過(guò)幾十年的發(fā)展,并且隨著空間光調(diào)制器調(diào)制精度的提升以及計(jì)算算法的不斷優(yōu)化,光學(xué)神經(jīng)網(wǎng)絡(luò)的巨大潛力也不斷地被挖掘,在機(jī)器視覺(jué)、醫(yī)學(xué)影像處理、光學(xué)傳感器網(wǎng)絡(luò)等領(lǐng)域都有著潛在的應(yīng)用前景。
論文信息
本文介紹了一種利用全卷積神經(jīng)網(wǎng)絡(luò)(FCN)生成多深度相位全息的方法。該方法主要涉及一個(gè)前向-后向衍射框架來(lái)計(jì)算多深度衍射場(chǎng),以及一個(gè)逐層替換方法(L2RM)來(lái)處理遮擋關(guān)系。由前者計(jì)算的衍射場(chǎng)被輸入到精心設(shè)計(jì)的FCN中,它利用其強(qiáng)大的非線性擬合能力來(lái)生成3D場(chǎng)景的多深度全息圖。后者可以通過(guò)補(bǔ)充被遮擋物體的信息,使場(chǎng)景重建中不同層的邊界進(jìn)行平滑處理,從而提高全息圖的重建質(zhì)量。實(shí)驗(yàn)中通過(guò)將計(jì)算全息圖(computer-generated hologram,CGH)加載到核心組件空間光調(diào)制器(spatial light modulator,SLM)上,實(shí)現(xiàn)刷新和動(dòng)態(tài)3D顯示。
部分實(shí)驗(yàn)過(guò)程及實(shí)驗(yàn)結(jié)果
實(shí)驗(yàn)中使用波長(zhǎng)為638(±8)nm、功率為30mW的非偏振半導(dǎo)體激光器,如圖1所示,光纖的輸出端放置在焦距為100mm的準(zhǔn)直透鏡焦點(diǎn)處來(lái)獲得平面波,使用中性密度濾波器作為衰減器和偏振器來(lái)獲得線偏光。旋轉(zhuǎn)半波片(HWP)使得光的偏振方向與LCOS配向角方向一致,接著插入一個(gè)矩形孔徑,得到矩形輪廓。利用空間光調(diào)制器(中科微星 FSLM-4K70-P02)對(duì)入射光進(jìn)行相位調(diào)制和反射,再使用焦距為100mm的傅里葉透鏡進(jìn)一步放大重建場(chǎng)景。采用空間濾波器,使所需的衍射階通過(guò),其他衍射階濾波。重建后的放大3D場(chǎng)景使用相機(jī)拍攝。
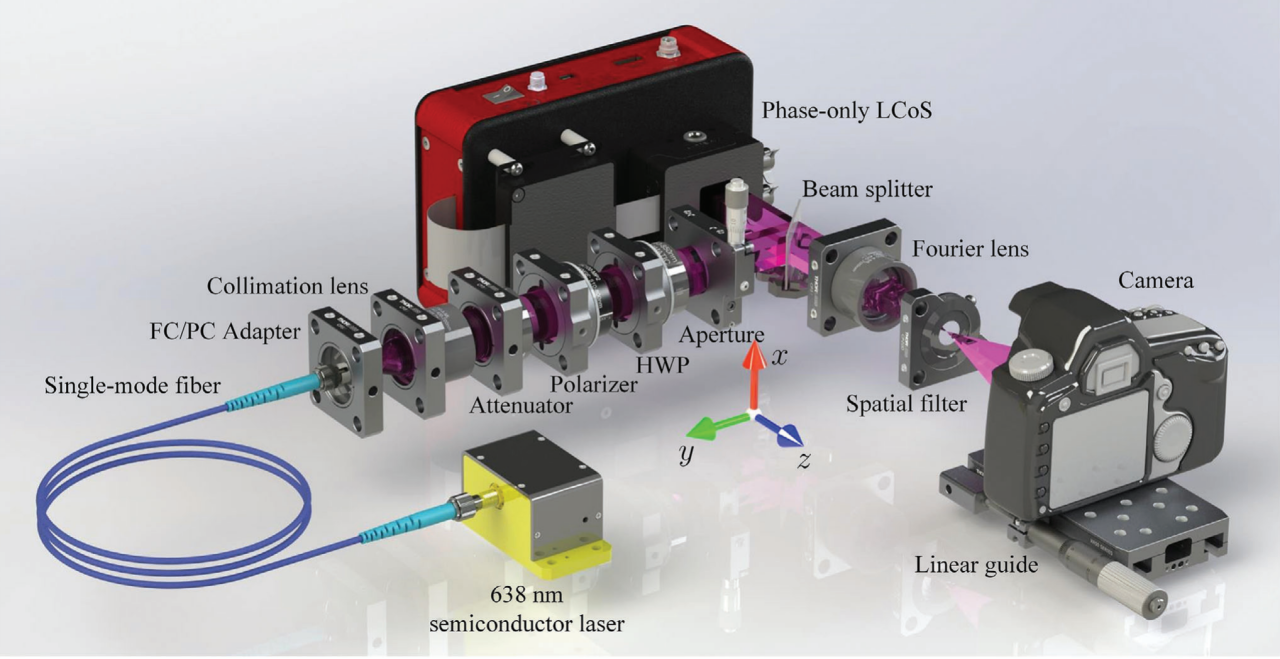 圖1 實(shí)驗(yàn)裝置(相位型空間光調(diào)制器,型號(hào):FSLM-4K70-P02)
圖1 實(shí)驗(yàn)裝置(相位型空間光調(diào)制器,型號(hào):FSLM-4K70-P02)
實(shí)驗(yàn)中所采用空間光調(diào)制器的參數(shù)規(guī)格如下:

|
型號(hào) |
FSLM-4K70-P02 |
調(diào)制類(lèi)型 |
相位型 |
|
液晶類(lèi)型 |
反射式 | 灰度等級(jí) |
8位,256階 |
|
像素?cái)?shù) |
4094×2400 |
像元大小 | 3.74μm |
|
有效區(qū)域 |
0.7" 15.31mm×8.98mm |
相位范圍 |
2π@633nm |
| 填充因子 | 90% | 光學(xué)利用率 | 60%@532nm |
| 配向角 |
0° |
衍射效率 | >97%@32階 633nm |
|
刷新頻率 |
60Hz | 光學(xué)利用率 |
35%@532nm |
|
電源輸入 |
12V 2A |
響應(yīng)時(shí)間 |
上升10.8ms,下降18.5ms |
|
損傷閾值 |
2W/cm2 |
數(shù)據(jù)接口 |
HDMI |
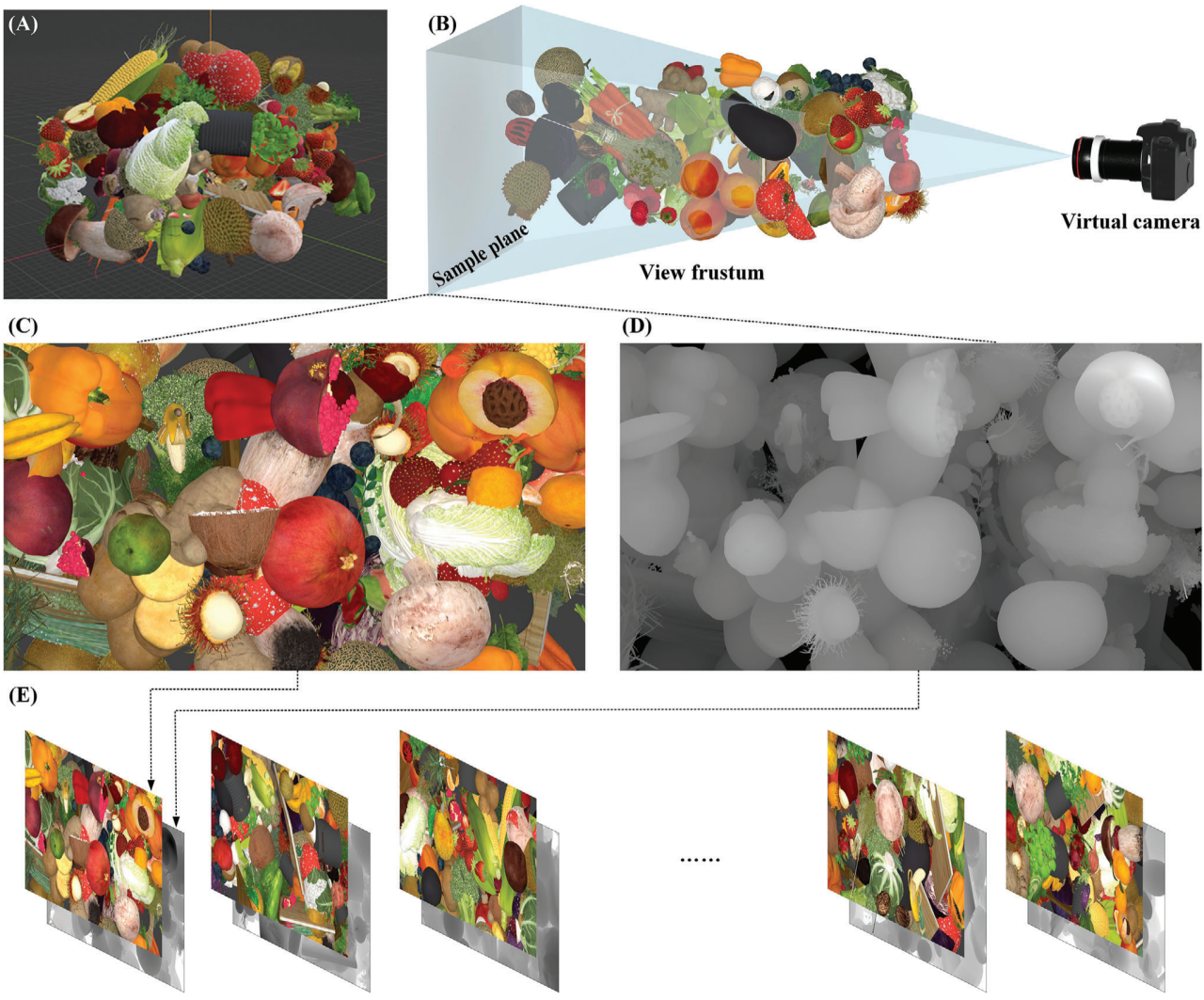 圖2三維圖形數(shù)據(jù)集的生成。A)3D隨機(jī)場(chǎng)景。B)取樣過(guò)程。C)強(qiáng)度圖像。D)深度圖像。E)三維圖形數(shù)據(jù)集。
圖2三維圖形數(shù)據(jù)集的生成。A)3D隨機(jī)場(chǎng)景。B)取樣過(guò)程。C)強(qiáng)度圖像。D)深度圖像。E)三維圖形數(shù)據(jù)集。
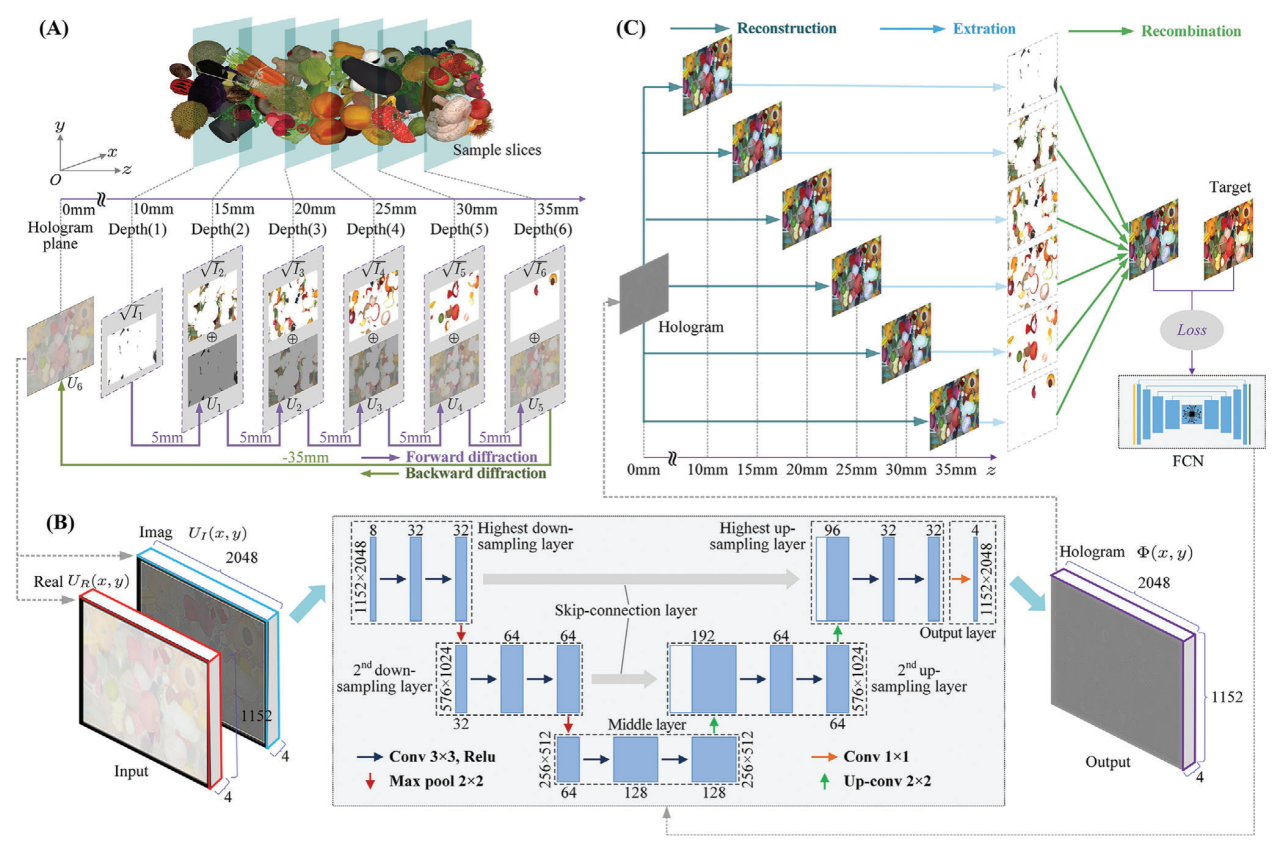 圖3 用FCN生成多深度全息圖。A)利用前后衍射框架計(jì)算多深度衍射場(chǎng)。B)FCN的結(jié)構(gòu)。C)多深度誤差的計(jì)算。
圖3 用FCN生成多深度全息圖。A)利用前后衍射框架計(jì)算多深度衍射場(chǎng)。B)FCN的結(jié)構(gòu)。C)多深度誤差的計(jì)算。
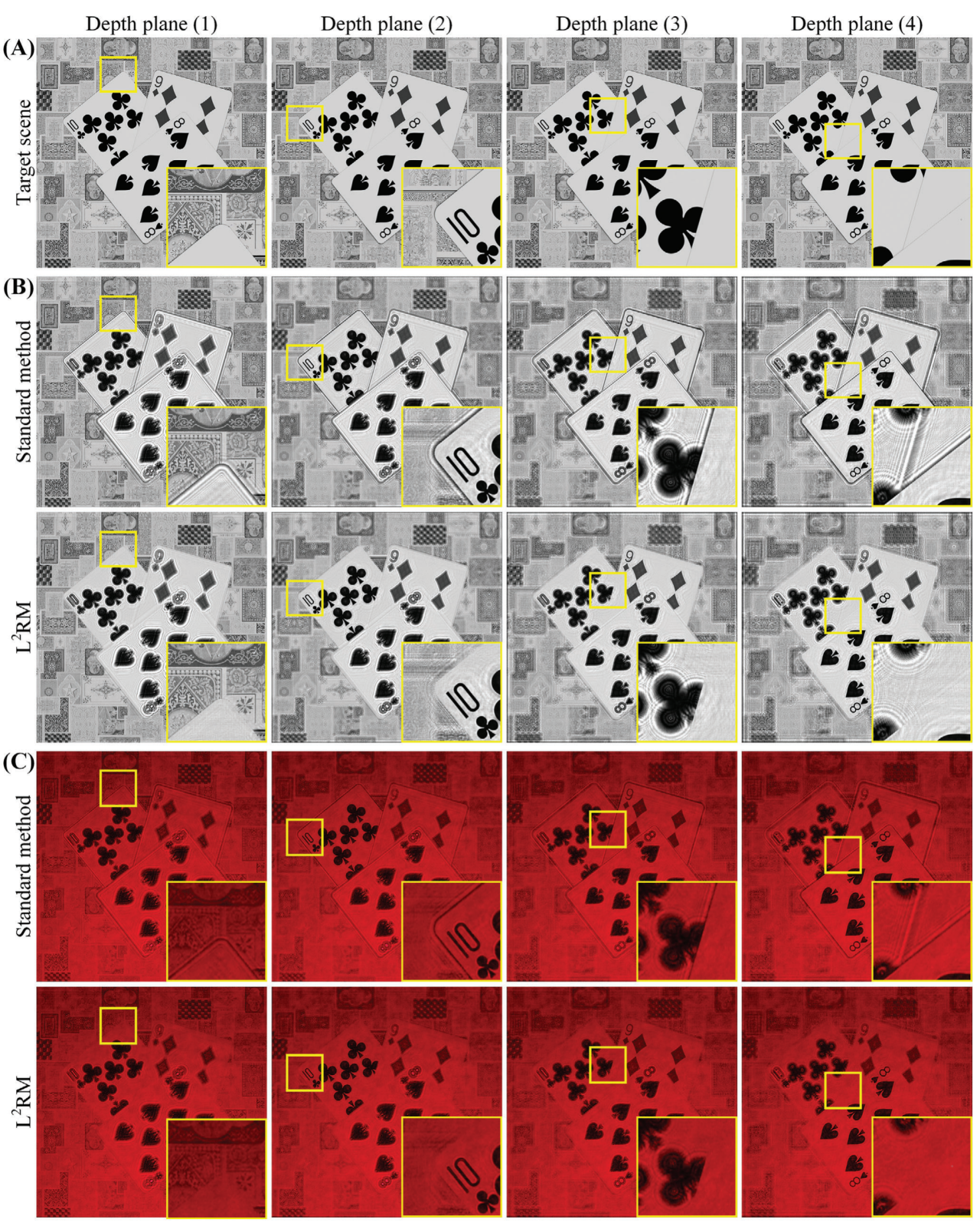 圖4 重建圖像的質(zhì)量比較。A)目標(biāo)場(chǎng)景。B) 分別對(duì)應(yīng)標(biāo)準(zhǔn)方法和L2RM的數(shù)值重建。C) 分別對(duì)應(yīng)標(biāo)準(zhǔn)方法和L2RM的光學(xué)重建。
圖4 重建圖像的質(zhì)量比較。A)目標(biāo)場(chǎng)景。B) 分別對(duì)應(yīng)標(biāo)準(zhǔn)方法和L2RM的數(shù)值重建。C) 分別對(duì)應(yīng)標(biāo)準(zhǔn)方法和L2RM的光學(xué)重建。
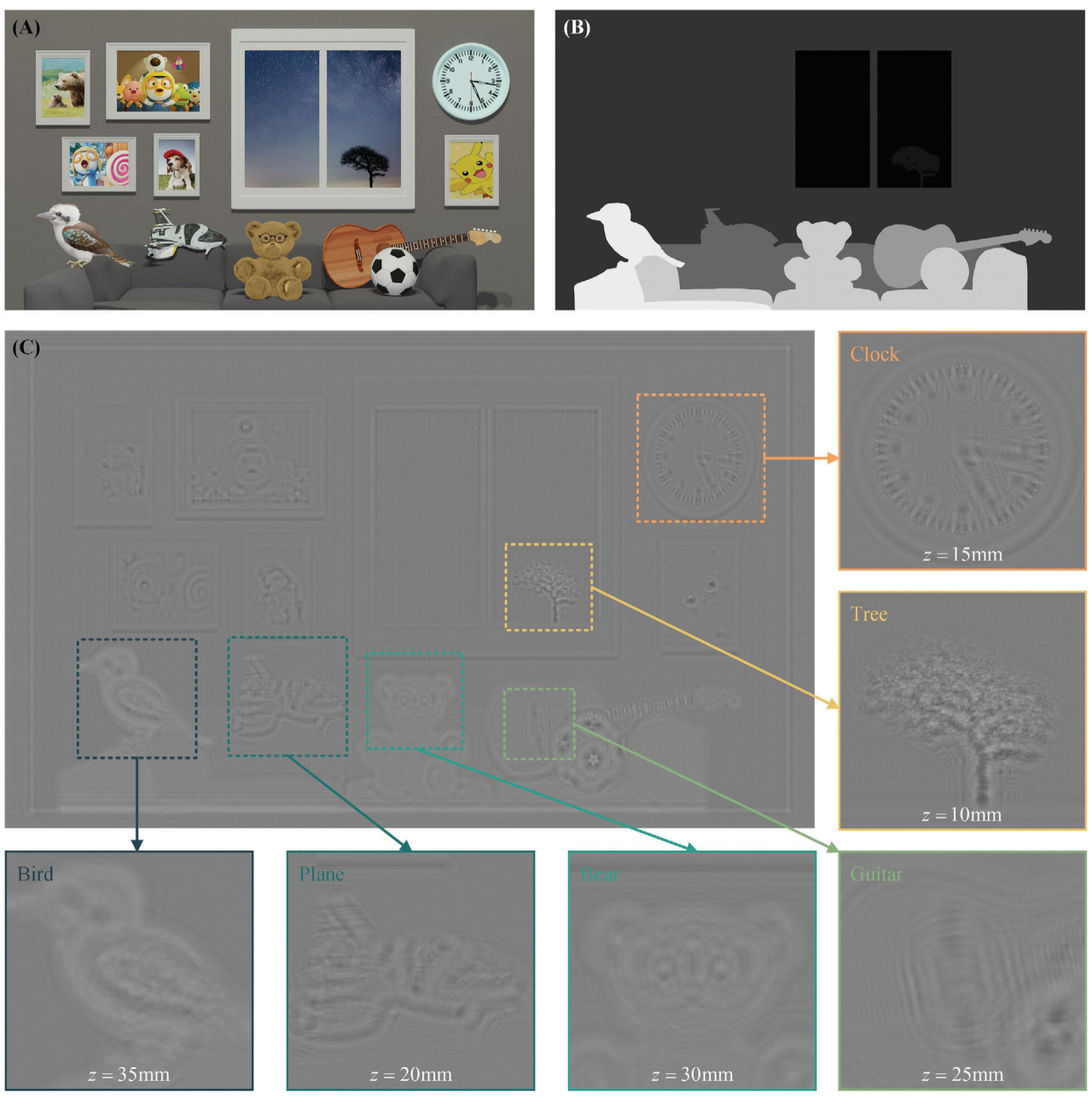 圖5 復(fù)雜的三維場(chǎng)景和相應(yīng)的全息圖。A)強(qiáng)度圖像和B)三維場(chǎng)景的深度圖像。C)由FCN生成的多深度全息圖。
圖5 復(fù)雜的三維場(chǎng)景和相應(yīng)的全息圖。A)強(qiáng)度圖像和B)三維場(chǎng)景的深度圖像。C)由FCN生成的多深度全息圖。
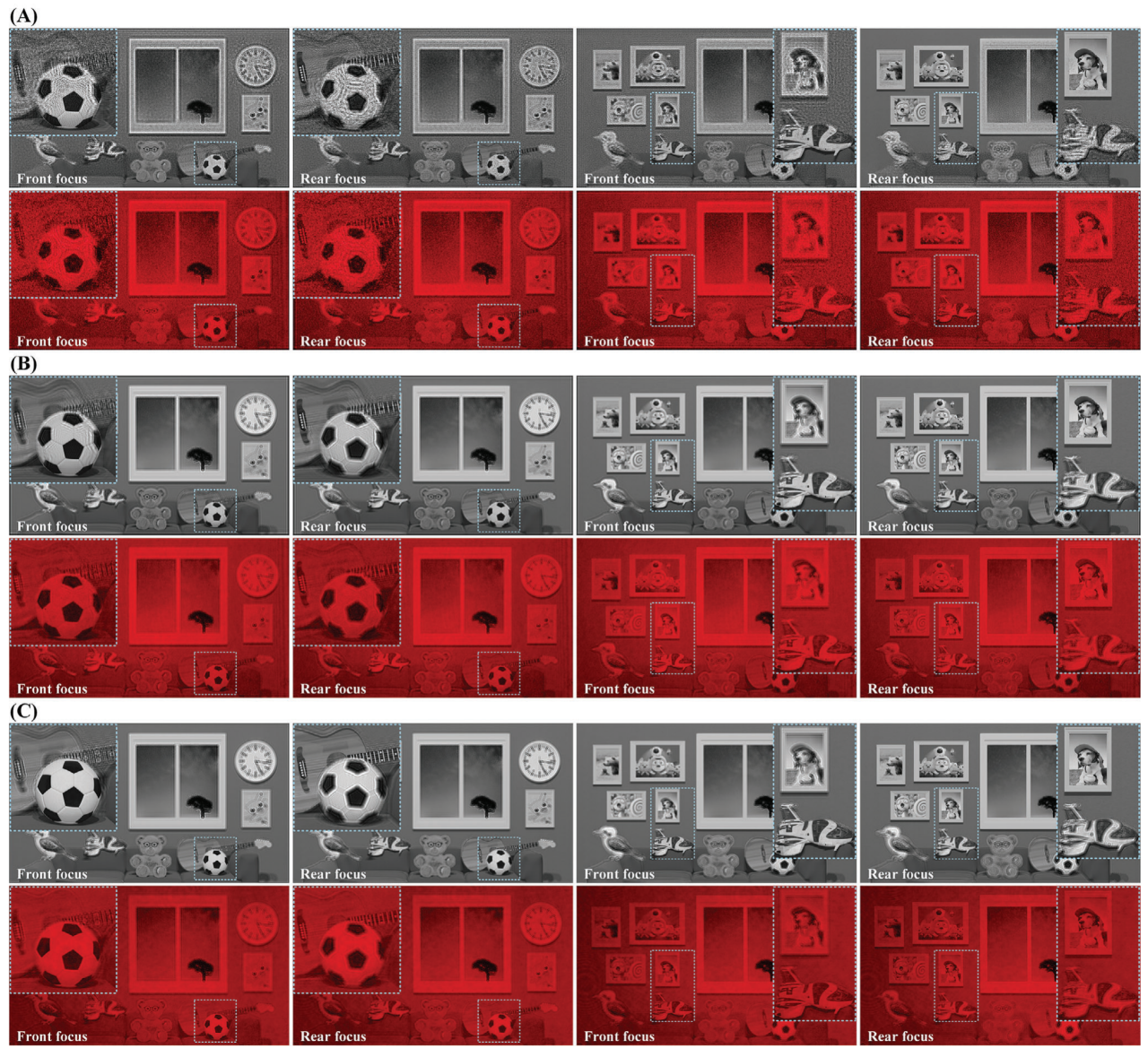 圖6 A) WH、B) DPH和C) L2RM的數(shù)值重建和光學(xué)重建。第1、3、5行的圖像表示數(shù)值重建,而第2、4、6行表示光學(xué)重建。在第1列和第2列中,相機(jī)分別聚焦于“足球-吉他”的前聚焦平面(“足球”)和后聚焦平面(“吉他”)。在第3列和第4列中,相機(jī)分別聚焦于“飛機(jī)-狗”的前對(duì)焦平面(“飛機(jī)”)和后對(duì)焦平面(“狗”)。
圖6 A) WH、B) DPH和C) L2RM的數(shù)值重建和光學(xué)重建。第1、3、5行的圖像表示數(shù)值重建,而第2、4、6行表示光學(xué)重建。在第1列和第2列中,相機(jī)分別聚焦于“足球-吉他”的前聚焦平面(“足球”)和后聚焦平面(“吉他”)。在第3列和第4列中,相機(jī)分別聚焦于“飛機(jī)-狗”的前對(duì)焦平面(“飛機(jī)”)和后對(duì)焦平面(“狗”)。
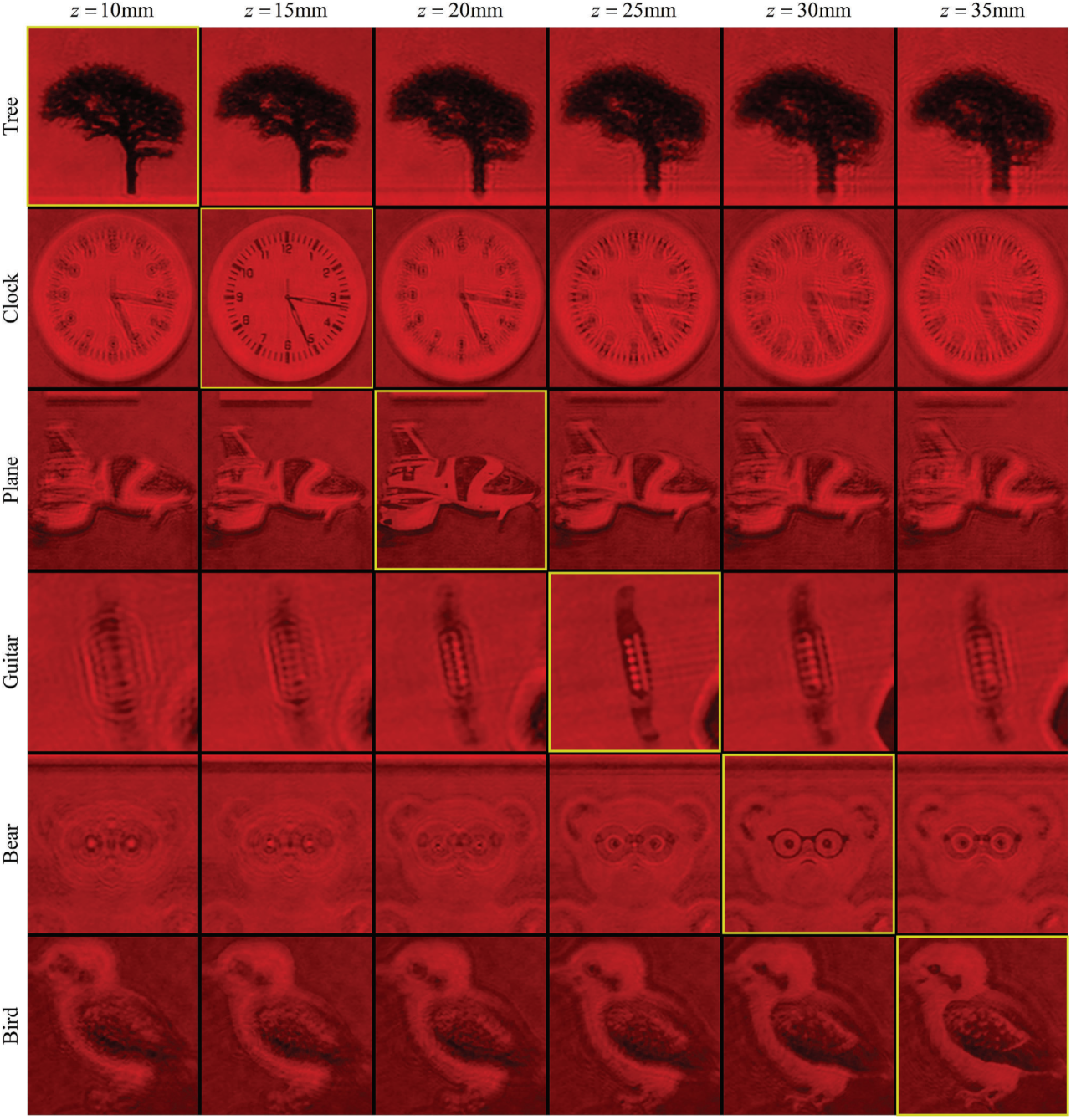 圖7 在不同深度的平面上重建對(duì)象。
圖7 在不同深度的平面上重建對(duì)象。
寫(xiě)在最后
光神經(jīng)網(wǎng)絡(luò)因具有并行大規(guī)模計(jì)算、低功耗運(yùn)行以及快速響應(yīng)的潛力而受人們的廣泛關(guān)注,而空間光調(diào)制器作為衍射器件在衍射神經(jīng)網(wǎng)絡(luò)中扮演著重要角色,并且應(yīng)用在眾多領(lǐng)域中,例如AR/VR的3D全息成像計(jì)算、生物醫(yī)學(xué)成像、光學(xué)傳感等。基于衍射神經(jīng)網(wǎng)絡(luò)的可編程能力,未來(lái)有望實(shí)現(xiàn)更高性能的衍射神經(jīng)網(wǎng)絡(luò)。
審核編輯 黃宇
-
神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
42文章
4772瀏覽量
100857 -
三維全息
+關(guān)注
關(guān)注
0文章
3瀏覽量
5924 -
光調(diào)制器
+關(guān)注
關(guān)注
0文章
85瀏覽量
8394
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
卷積神經(jīng)網(wǎng)絡(luò)與傳統(tǒng)神經(jīng)網(wǎng)絡(luò)的比較
全卷積神經(jīng)網(wǎng)絡(luò)的工作原理和應(yīng)用
基于神經(jīng)網(wǎng)絡(luò)的全息圖生成算法
循環(huán)神經(jīng)網(wǎng)絡(luò)和卷積神經(jīng)網(wǎng)絡(luò)的區(qū)別
卷積神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)示例
卷積神經(jīng)網(wǎng)絡(luò)的實(shí)現(xiàn)原理
cnn卷積神經(jīng)網(wǎng)絡(luò)分類(lèi)有哪些
卷積神經(jīng)網(wǎng)絡(luò)訓(xùn)練的是什么
深度學(xué)習(xí)與卷積神經(jīng)網(wǎng)絡(luò)的應(yīng)用
卷積神經(jīng)網(wǎng)絡(luò)的原理與實(shí)現(xiàn)
卷積神經(jīng)網(wǎng)絡(luò)的基本結(jié)構(gòu)及其功能
卷積神經(jīng)網(wǎng)絡(luò)的原理是什么
卷積神經(jīng)網(wǎng)絡(luò)和bp神經(jīng)網(wǎng)絡(luò)的區(qū)別
深度神經(jīng)網(wǎng)絡(luò)模型有哪些
詳解深度學(xué)習(xí)、神經(jīng)網(wǎng)絡(luò)與卷積神經(jīng)網(wǎng)絡(luò)的應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論