


CAN波形一定都是標標準準的方波嗎?其實并非如此,今天就把CAN總線上的幅值“異常”歸歸類。
 ?CAN-bus信號產生原理
?CAN-bus信號產生原理
眾所周知,一個標準CAN節點由微處理器、控制器、收發器構成。多個節點成總線型架構掛在一起,兩個端節點上并有終端電阻。其結構簡圖如下圖所示。
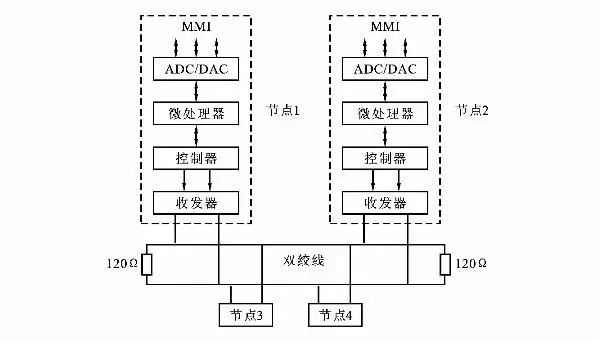
圖1CAN-bus節點網絡結構
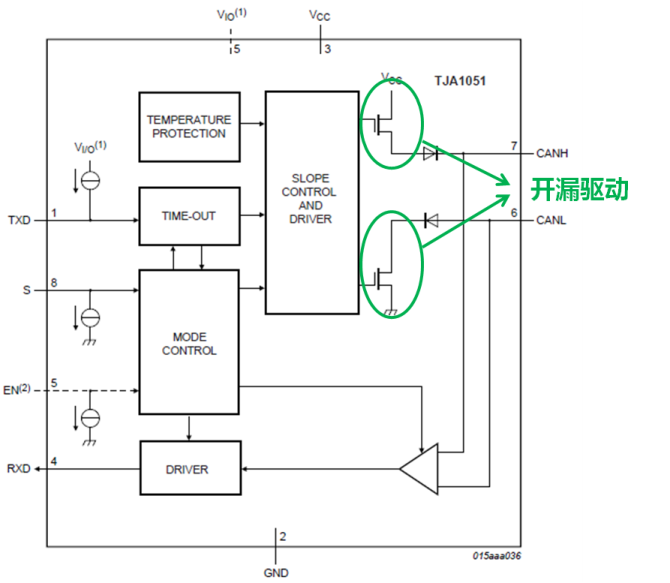
可以看出,與總線直接相連的是CAN節點的收發器,其內部電路等效如下圖所示,CAN-H、CAN-L直接由三極管驅動,近似可以看成電流型輸出。結合上文所述網絡架構中的終端電阻,節點發出信號時電流流過終端電阻產生電壓信號,當同一時間多個節點同時發出信號時就會使總線上的電流高于單一節點發出的電流,使得我們觀察電壓信號時出現突增的現象。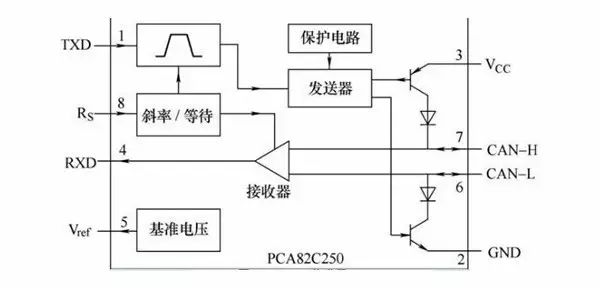
圖2CAN收發器結構CAN-bus是總線型結構,通常狀態下一般只有一個節點占有總線。那么有幾種情況會導致多個節點同時發出,進而導致幅值出現“異常”呢,下文通過致遠電子CANScope分析儀的幾個測試案例總結一下。
?應答位上的幅值“異常”
最常見的,當CAN網絡上存在3個以上的節點時,應答位上的幅值要明顯高于同一報文的其他位置,如下圖所示。可以看到報文在ID段、數據段、CRC校驗段處的幅值均比較一致,但是到應答位處時幅值出現突增。這是為什么呢,大家都知道CAN-bus總線擁有自動應答機制,即當某一節點發送完一幀報文時,所有總線中的其余非只聽節點均會在應答位處做出響應,如果報文被成功識別則發出一個顯性位作為應答信號。
結合上文所述,應答位此時CAN總線上的電流是若干節點電流疊加的綜合,所以應答位的幅值高就很容易講通了。
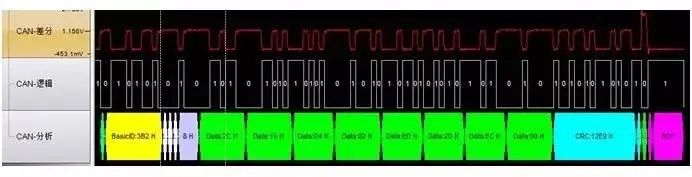 圖3 應答位上的幅值“異常”
圖3 應答位上的幅值“異常”
?ID段上的幅值“異常”
CAN-bus總線的一大特點就是多主結構,即網絡中所有節點功能對等,沒有主從機的概念,所有節點均可自由收發數據。保證多主結構得以實現的關鍵在于CAN總線的仲裁機制也稱為優先級機制。當網絡中同時有多個節點同時發送數據時會在ID段處產生仲裁,優先級高的節點會最終占有總線。
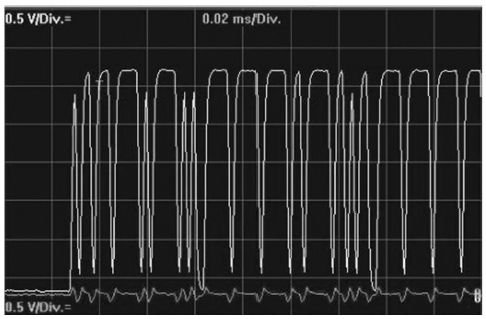
如下圖所示,可以看到在圖中的標記處波形出現了“臺階”。正是由于在“臺階”出現前有兩個節點同時發出數據,導致幅值增高,在“臺階”處某一節點由于優先級高占有總線,另一個節點暫時退出,使得幅值又回歸平常。
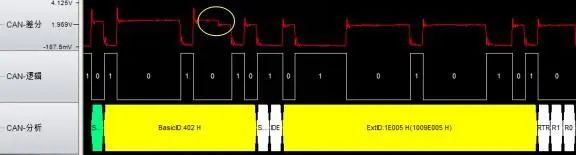 圖4 ID段上的幅值異常
圖4 ID段上的幅值異常
?錯誤幀上的幅值“異常”
再看看這個案例,可以看到在波形的后半部分也出現了臺階式的幅值增高,光標卡住的顯性電平區間可以看到寬度明顯超過了5個標準位寬,按照CAN總線的位填充規則(不能存在連續六個相同的顯性位或隱性位)表明這是一條錯誤幀。但是不要誤會,并不是因為這個幅值“異常”而導致的錯誤幀,我們知道CAN總線有錯誤重發機制,以保證總線傳輸數據的可靠性。這種可靠性正是通過錯誤幀的“一票否決制”實現的。
當網絡中某一節點識別到一條認為是有問題的報文后會發送六個連續的顯性位(即錯誤幀),投出這一否決票通知網絡上所有其他節點,本條報文無效。此后其他節點會以“跟票”的形式全部發出六個顯性位錯誤幀。所以此時多個節點重疊部分的錯誤幀的幅值就會高一些了。
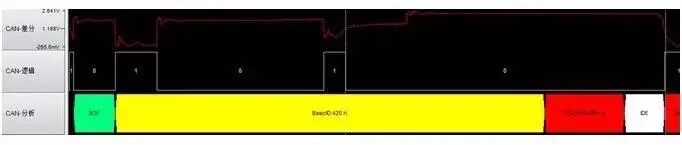
圖5錯誤幀上的幅值異常
-
測試
+關注
關注
8文章
5685瀏覽量
128737 -
CAN總線
+關注
關注
145文章
1981瀏覽量
132710 -
終端電阻
+關注
關注
1文章
96瀏覽量
12155
發布評論請先 登錄
CAN總線通訊異常
CAN通訊的波形異常原因是什么?
CAN總線多節點通信異常問題解決
CAN總線概述及應用_CAN總線的應用案例(汽車CAN總線應用)

CAN接口異常如何分析?
如何解決CAN總線各種現場異常工況
基于機器學習的汽車CAN總線異常檢測方法
CAN L對地短路總線波形
叉車can總線異常怎么解決
CAN總線十萬個為什么 | 聊聊幾種常見的CAN網絡拓撲






 工商網監
工商網監

評論