

安全帽佩戴監(jiān)控是鐵路工程施工人員安全管理中的重點和難點,它對檢測算法的準確 率與檢測速度都有較高的要求。本文提出一種基于神經(jīng)網(wǎng)絡架構搜索的安全帽佩戴檢測算法 NAS-YOLO。該神經(jīng)網(wǎng)絡架構由上、下行操作單元組成,采用二進制門策略對網(wǎng)絡架構進行更 新,通過數(shù)據(jù)驅動的方式自動確定合適的神經(jīng)網(wǎng)絡體系結構。實驗結果表明,NAS-YOLO算法 在準確率、召回率及平均檢測速度方面均優(yōu)于實時目標檢測算法 YOLOv3,可以在工程施工中 對施工人員安全帽佩戴情況進行實時監(jiān)控。
關鍵詞 安全帽佩戴;神經(jīng)網(wǎng)絡架構搜索;自動檢測;檢測算法;實時監(jiān)控
引言
施工現(xiàn)場環(huán)境復雜多變,人群密集,頻繁出現(xiàn)工 人不遵守規(guī)章所引發(fā)的傷亡事故,安全帽作為一 種常見的防護用具,能夠有效減輕外來危險源對頭 部的傷害,因此,實時監(jiān)控施工場所工人安全帽佩戴 情況至關重要。 然而人工監(jiān)管費時費力,無法滿足 安全生產(chǎn)要求。 以計算機視覺為技術支撐的智能監(jiān) 控系統(tǒng)有人力成本低、檢測效率高等優(yōu)勢,為自動監(jiān) 測施工現(xiàn)場工人佩戴安全帽情況的方案落地提供了 技術方向

1. 安全帽監(jiān)控系統(tǒng)邏輯架構
安全帽監(jiān)控系統(tǒng)的邏輯結構主要分為視頻采集、智能視頻分析和監(jiān)控中心3個模塊,如圖1所示。視頻采集模塊負責通過攝像機進行視頻采 集;智能視頻分析模塊是通過算法實現(xiàn)目標檢測、分類,并進行行為和事件檢測,同時還負責對違規(guī)行為發(fā)出報警信息,是安全帽監(jiān)控系統(tǒng)的核心模塊;監(jiān)控中心與監(jiān)控人員直接交互,起到對整個監(jiān)控系統(tǒng)進行監(jiān)視和管理的作用。
安全帽監(jiān)控系統(tǒng)首先由視頻采集模塊獲取視頻 數(shù)據(jù);再由智能視頻分析模塊利用目標檢測技術提取出視頻中的動態(tài)目標,同時進行分類;然后,將分類得到的目標信息與預先設定好的報警準則進行邏輯判斷,如符合預定準則,則智能視頻分析模塊向監(jiān)控中心發(fā)送預警或報警信息;如不符合預定準則,則繼續(xù)進行目標檢測[8]。目標檢測與分類是通 過人工智能技術(即深度神經(jīng)網(wǎng)絡) 來完成的。與 常用的深度神經(jīng)網(wǎng)絡算法不同,這里介紹通過 NAS算法自動搜索合適的神經(jīng)網(wǎng)絡架構。
2.YOLOv3檢測模型
YOLOv3 的主干網(wǎng)絡為 Darkent-53,其中,包含53個卷積層和5個殘差塊,整體網(wǎng)絡結構如圖 2 所 示。 每個殘差塊包含殘差單元,而殘差單元由DBL組件組成,DBL 組件中包括卷積、批量歸一化和 Leaky reiu激活函數(shù)。 殘差單元由DBL通過相加而 成,殘差塊由DBL和殘差單元構成,其中,殘差塊借 鑒ResNet的思想,增強了特征融合能力。 YOLOv3 通過改變卷積核的步長來實現(xiàn)張量的尺度變換,輸 出 3 個不同大小的尺度。
YOLOv3網(wǎng)絡結構
3. NAS算法
NAS 算法是自動機器學習領域的熱點算法之 一,可通過數(shù)據(jù)特征自動找到合適的神經(jīng)網(wǎng)絡架 構[9] 。該算法的原理是光定義搜索空間;然后,通 過搜索策略找出候選網(wǎng)絡架構,對候選網(wǎng)絡進行評 估;最后,根據(jù)評估結果進行下一輪的搜索。由于 NAS 的根本思想是探索各種潛在的解決方案,搜 索空間越大,需要訓練與評估的架構就越多,消耗 的資源與時間就越多。因此,搜索空間的設定將直 接影響計算開銷。目前 NAS 的主流設計方法為先 基于單元 (cell) 的架構進行設計,再將單元堆疊 在主干網(wǎng)絡上,構成整體網(wǎng)絡架構,并由此限制搜 索空間大小。換言之,大型網(wǎng)絡是由多個單元組成 的,而單元的結構是由整個網(wǎng)絡共享的[10] ,因此主 干網(wǎng)絡的選擇也十分重要。
目前主流的目標檢測算法是 Fast r-cnn[11] 系列 算法,首先使用神經(jīng)網(wǎng)絡生成待檢測預選定位框, 再對預選定位框進行調整和分類,屬于兩階段算 法,雖然精度高,但實時性不強。而YOLO (You Only Look Once)[12] 系列的一階段算法采用了回歸 的思想,直接在圖像上回歸出預選定位框,同時預 測預選定位框所屬類別。YOLO 系列算法的檢測 精度雖然略低于 Fast r-cnn 系列,但是運行速度 快,能夠很好地完成實時目標檢測任務。另外,還 有 SSD (Single Shot MultiBox Detector)[13] 算法,結合了回歸思想和預選定位框機制,使得檢測速度和準確率都得到提升。YOLO 系列算法經(jīng)過不斷 更新,其中 YOLOv3[14] 結合了多種網(wǎng)絡設計技 巧,包括了SSD算法中的多尺度特征融合策略[15] , 進一步提高了網(wǎng)絡的檢測性能。因此,本文以 YOLOv3 為基礎框架,設計了基于神經(jīng)網(wǎng)絡架構 搜 索 的 YOLO 網(wǎng) 絡 , 即 NAS-YOLO。 NASYOLO由2種單元架構組成,分別是下行單元和上 行單元,并通過基于單元的搜索方式,確定其最終 網(wǎng)絡拓撲結構。

3.1 架構搜索方式
對二值化的路徑更新使用了 Cai H 等[20] 提出 的二進制門方法。這是一種數(shù)據(jù)驅動的方式,具體 操作如下。 1) 在訓練網(wǎng)絡權重參數(shù)時,先凍結架構參數(shù), 并為每批輸入的數(shù)據(jù)隨機選取二進制門,根據(jù)二進 制門得到存活路徑。 2) 在訓練數(shù)據(jù)集中,通過標準梯度下降,更 新存活路徑的權值參數(shù)。 3) 在訓練架構參數(shù)時,先凍結權重參數(shù),后 重置二進制門,更新并驗證數(shù)據(jù)集中的架構參數(shù)。 這2個更新步驟以替代方式執(zhí)行,一旦完成架構參 數(shù)的訓練,就可以通過修剪冗余路徑來導出緊湊的 架構。 每次架構參數(shù)的更新只涉及2條路徑,從而將 內存需求降低到訓練緊湊模型的相同水平。
3.2 模型訓練
使用安全帽佩戴檢測數(shù)據(jù)集對 NAS-YOLO 算 法進行訓練。該數(shù)據(jù)集共有 7 581 張圖像,包含 9 044 個佩戴了安全帽的人像 (正樣本),以及 111 514 個普通人像 (沒有佩戴安全帽,即負樣 本)。隨機選取數(shù)據(jù)集中一半的圖像作為訓練集, 另一半作為驗證集,使用二進制門搜索策略對神經(jīng) 網(wǎng)絡架構進行搜索。其中,批量的大小設置為 8, 共進行了200期的架構搜索優(yōu)化。 網(wǎng) 絡 權 重 訓 練 中 , 選 用 隨 機 梯 度 下 降 (Stochastic Gradient Descent,SGD) 優(yōu)化器,動 量 設 置 為 0. 95, 余 弦 學 習 率 從 0. 025 衰 減 到 0. 01,權重衰減為 0. 0003。架構參數(shù) α 的訓練使 用 Adam 優(yōu)化器[21],學習率設置為 0. 0003,重 量 衰 減 設 置 為 0. 0001。 使 用 1 塊 GeForce RTX 2080ti GPU 對 整 個 架 構 搜 索 , 大 約 需 要 2 天 時間
4. 結果驗證與分析
4.1 算法訓練
YOLOv3和NAS-YOLO訓練過程中的損失函 數(shù)曲線 (Loss Curve) 分別見圖2和圖3。圖中, 損失值越小,表示訓練出的模型與數(shù)據(jù)集的真實模 型越接近;在2次訓練過程中,網(wǎng)絡損失均保持穩(wěn) 定下降趨勢,YOLOv3在迭代 10 000次左右收斂, NAS-YOLO在迭代 40 000次左右收斂,說明訓練 基本順利;與圖2的曲線相比,圖3的曲線收斂于 一個更小的值,說明改進后的模型更接近數(shù)據(jù)集的 真實模型。
4.2 算法測試
將完成模型訓練NAS-YOLO網(wǎng)絡與現(xiàn)有的目 標檢測網(wǎng)絡進行對比,并將幾種算法分別應用于安 全帽監(jiān)控系統(tǒng)中,進行安全帽佩戴狀態(tài)的自動識 別。隨機選取2名工地管理人員,對視頻中施工人 員是否佩戴安全帽進行識別與判斷。一名管理人員 先做出判斷,另一名再對其判斷結果進行審查與修 正。將2名管理人員的識別判斷結果作為真值,評 估 NAS-YOLO 與 SSD、 Fast r-CNN、 YOLOv3 算法的實際應用準確度和運行速度。與其他方法相比,NASYOLO的平均準確率(mean Average Precision,mAP) 最高,達 96. 72%;處理速度也最快,檢測速度可達59. 6FPS (Frames Per Second);但召回率略低 于 Fast r-CNN,而 Fast r-CNN 運行速度慢,無法 應用于實時的目標檢測任務。
-
機器視覺
+關注
關注
163文章
4517瀏覽量
122371 -
人工智能
+關注
關注
1804文章
48788瀏覽量
246989 -
深度學習
+關注
關注
73文章
5555瀏覽量
122539
發(fā)布評論請先 登錄
智能安全帽|智能頭盔|AI安全帽音視頻語音對講多功能

基于RK3576開發(fā)板的安全帽檢測算法
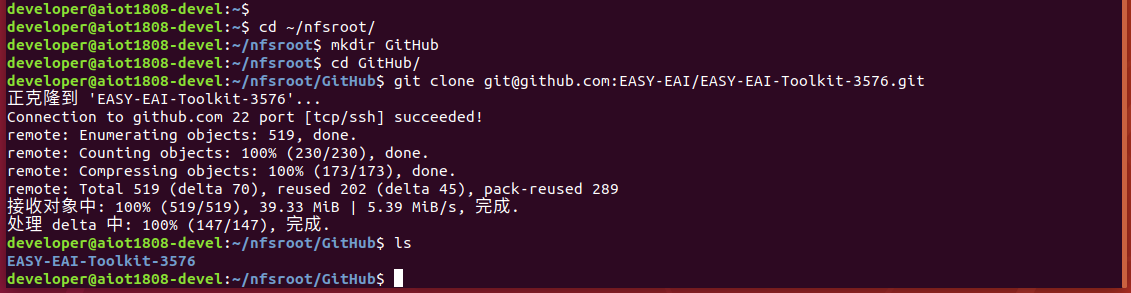
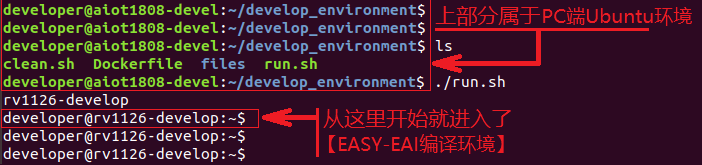
基于RV1126開發(fā)板實現(xiàn)安全帽檢測方案

基于RV1126開發(fā)板的安全帽檢測算法開發(fā)
智能安全帽_智能穿戴設備方案定制

智能安全帽_視頻語音對講|近電感應|4G5G智能安全帽頭盔

獨立北斗定位執(zhí)法記錄儀、單北斗定位智能安全帽、定位安全帽

智能安全帽_氧氣+硫化氫+一氧化碳+可燃氣體檢測防爆安全帽智能頭盔

安全帽未佩戴預警系統(tǒng) 勞保防護用品穿戴監(jiān)測系統(tǒng)

智能安全帽/智能頭盔_RTK高精度定位|生命體征檢測|紅外熱成像

北斗高精度智能安全帽|厘米級高精度定位|云端一體化|智能全能
安全帽佩戴識別攝像機

智能安全帽_智能頭盔_單北斗實時定位|危險氣體檢測|激光測距

智能安全帽_北斗高精度定位|生命體征監(jiān)控_智能頭盔解決方案

口罩佩戴檢測算法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論