 agv叉車怎么運行的?速度受哪些因素影響?有哪些不確定因素?
agv叉車怎么運行的?速度受哪些因素影響?有哪些不確定因素?
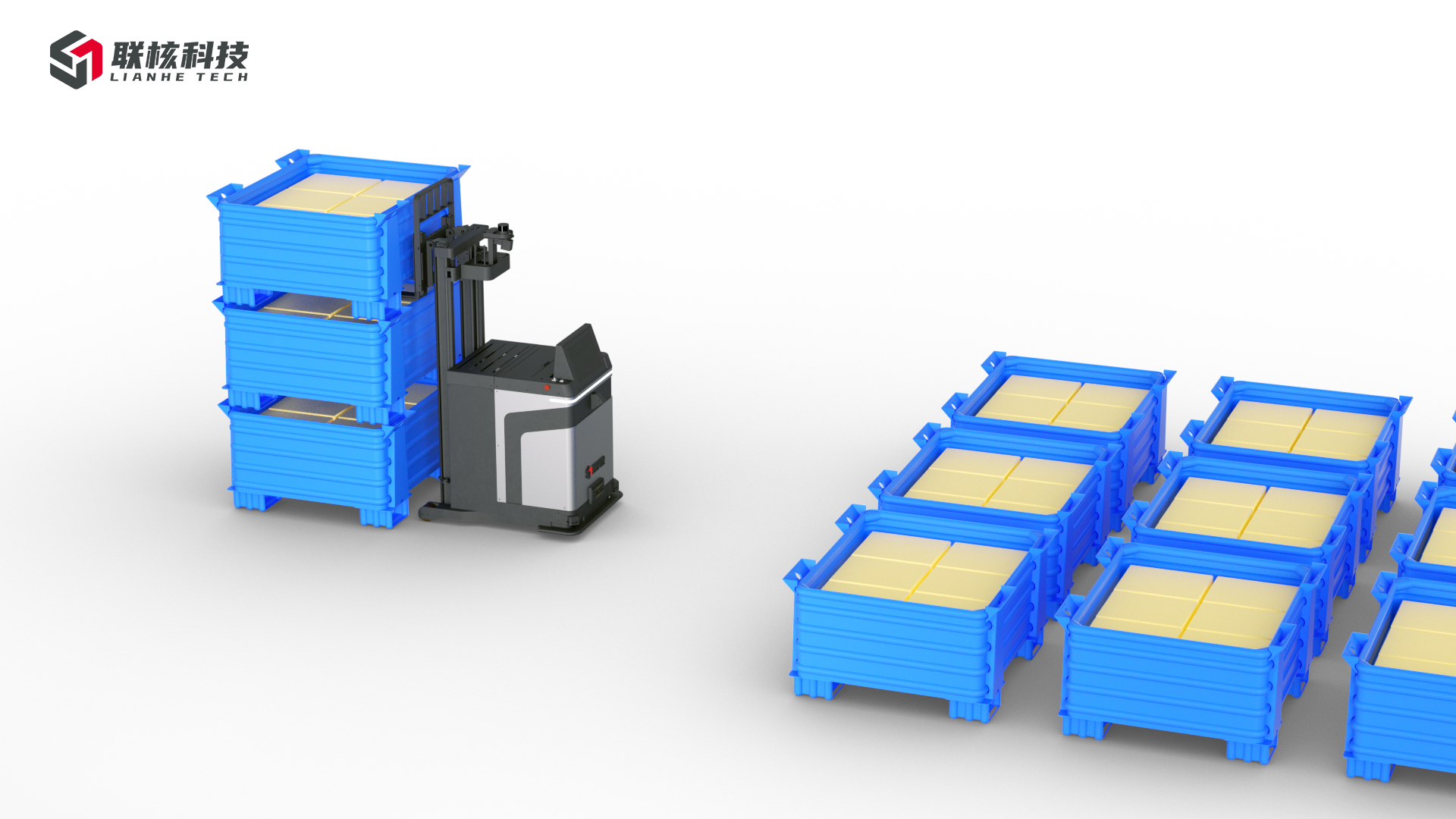
AGV叉車(自動導引車叉車)的運行主要基于其內置的導航系統和傳感器,通過智能化控制實現自主導航和作業。
一、AGV叉車的運行方式 定位與導航:
AGV叉車通過內置的導航系統和傳感器(如激光、紅外、超聲波等)感知周圍環境。這些傳感器信息使AGV叉車能夠與預設地標、磁標、墻壁等進行匹配,從而確定自己的位置并建立地圖。激光導航是其中的一種常見技術,通過激光雷達測量物體及地面的距離和位置,實現導航和定位。
路徑規劃:在導航時,AGV叉車需要規劃從起點到終點的最優路徑。它會根據地圖信息和設定的路徑規則,通過算法(如最短路徑算法、遺傳算法等)計算出最佳路徑。 避障與安全:AGV叉車在移動過程中,會實時監測周圍環境,以便及時避免障礙物。當發現障礙物時,它會通過傳感器接收到的信息,自動調整行進方向或停止移動,以確保安全。
物料搬運:AGV叉車的主要工作是搬運貨物。它通常配備有機械手臂或叉子,可以根據任務要求,自動將貨物從一個位置提取并搬運到另一個位置。

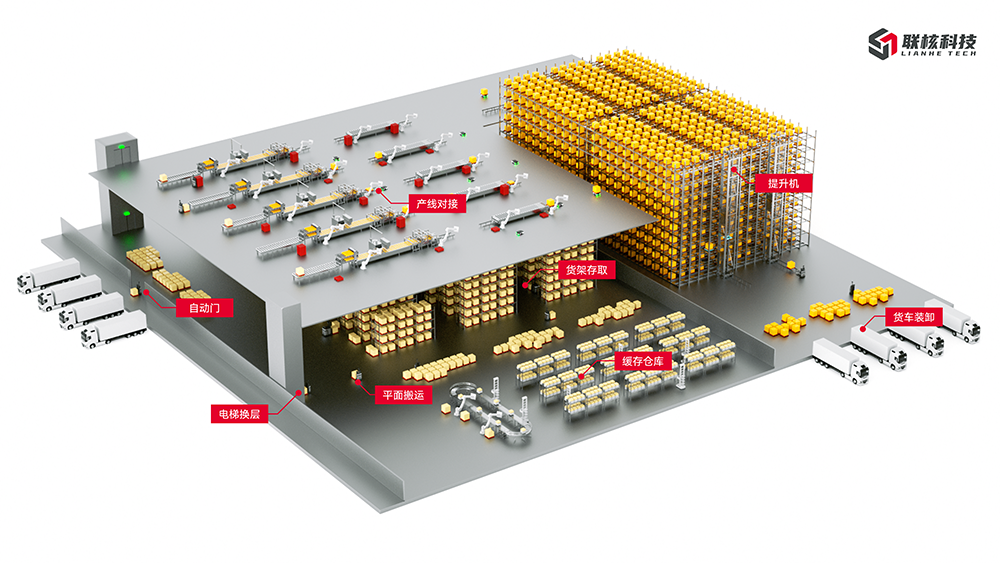
通信與協調:AGV叉車通常與上位系統(如倉庫管理系統)進行聯動,實現任務下發、狀態上報和調度協調等功能。通過與其他AGV叉車的無線通信,它們可以共享地圖信息、避免碰撞,并在需要時實現協同作業。
二、影響AGV叉車行駛速度的因素
承重:AGV叉車的承重是影響其行駛速度的重要因素之一。當AGV叉車承載的貨物重量增加時,會對車輛的結構和動力系統產生一定的影響。
一方面,承重增加會導致車輛的整體重量增加,對電機和電池的要求也就更高。如果超出了AGV叉車的承重范圍,電機和電池可能會因為超負荷工作而受到影響,進而影響行駛速度。
電機性能:電機的功率、扭矩和效率等性能參數直接影響叉車的行駛速度。電機性能越好,AGV叉車在相同條件下能夠達到更高的行駛速度。
電池電量:電池電量的多少直接影響叉車的行駛時間和速度。當電池電量充足時,AGV叉車能夠保持較高的行駛速度;而當電池電量不足時,叉車的行駛速度會受到限制。
輪胎狀況:輪胎的磨損、氣壓等因素也會影響叉車的行駛速度。磨損的輪胎可能增加行駛阻力,降低行駛速度。 路面狀況:路面磨損、坑洼等不平整情況可能導致叉車出現側翻、側滑等意外情況,從而降低行駛速度。
氣候條件:例如,在雨天,叉車可能更容易發生側滑,降低行駛速度;在炎熱的夏季,叉車可能會因為溫度過高而出現故障,影響行駛速度。
綜上所述,AGV叉車的運行依賴于其先進的導航和控制系統,同時其行駛速度受到多種因素的影響。在實際應用中,需要根據具體環境和需求進行合理配置和調整,以確保AGV叉車能夠高效、安全地完成作業任務。
審核編輯 黃宇
-
AGV
+關注
關注
27文章
1302瀏覽量
41074
發布評論請先 登錄
相關推薦
AGV無人叉車/電動叉車的立式舵輪選型指南
電解電容的壽命受哪些因素影響?
TPA2013D1功率是如何計算出來的,和哪些因素有關?
激光導航AGV機器人定位精度受哪些因素影響?

SD2315在叉車和AGV小車轉向系統上的應用
數控機床的加工精度主要受哪些因素影響
買agv叉車之前,先想清楚這8個問題,讓你不再糾結!
半導體應變片的主要特性有哪些?受哪些因素影響?
AGV無人叉車 | 我們為什么要投資“智慧生產”

AGV物流叉車能用在什么行業?效率如何?能定制嗎?

地面平整度影響物流agv叉車運行嗎?怎么檢查地面?收藏!






 工商網監
工商網監
評論