 無人機DIY制作全過程,簡直是酷斃了
無人機DIY制作全過程,簡直是酷斃了
經常上MK的網站看飛行錄相,四軸飛行起來穩定性真好,簡直是酷斃了。最終沒能抵制住誘惑,沖動之下決定自已也做個來玩玩。從網上收集資料,一切從0起步。經歷了幾個月的走走停停,現在已陸續完成了無刷電調、四軸機架、遙控器多通道改造、IMU模塊、飛控板設計制作。現小有成果,公布出來和大家交流交流,以資進步
由于水平所限,只熟悉和使用51架構的MCU,系統的所有模塊都是架構在C8051F的基礎上。但四軸所涉及的原理、控制理論都是一樣的原理,希望各位童鞋不吝賜教,多多指導,謝謝!!!
1.從舊貨攤買的兩個硬盤
2.費了九牛二虎之力,最后改造一個拆手機用的起子,搞定了
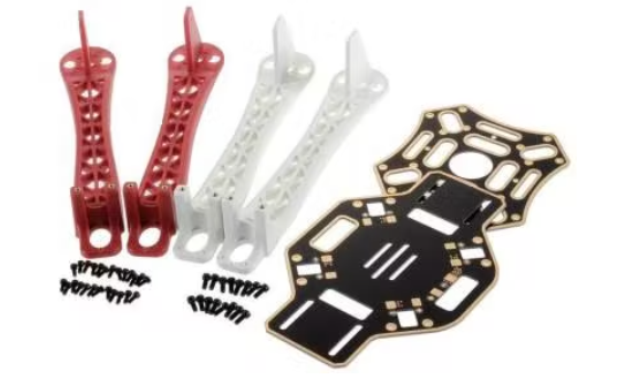
機架打算用現有的電直尾管和管座配上硬盤片構成,電機用新西達2212 KV930,兩正兩反的槳用口碑不錯的德國EPP1045 。
3.固定電直尾管的座子,好貴呀
4.固定電直尾管的座子,好貴呀
5.和到手的電機、尾管合張照。
---------------------------------------
6.外加工的4個電機安裝座
7.機體主要部分完成
8.加工機架的得力工具
9.EPP1045
10.一正一反
11.和市場上3塊錢一個的正槳對比
12.用電機原配的槳保護器固定兩葉槳
13.焊上香蕉頭,感覺重量不小,拆除前留個影
14.電機安裝固定方式
15.機架整體結構
16.平視角度,很有型吧
17.整機完成效果圖
好了,機架完成了。接下來是遙控器的改造時間 , 買了個又便宜又大塊的FT06-C,準備先把6通改到8通,增加兩個比例通道,并且配上LCD液晶屏,用來顯示控的相關參數。控的高頻頭還留用,PPM編碼板整個換掉它。
18.準備拿來折騰的天地飛6C控
19.FT06-C內部結構
20.在這個位置加個LCD屏
21.打回來的樣板,這樣做省¥¥
22.為裁板專門買的勾刀
23.花了一個多小時時間,搞定!
24.拆掉FT06-C控的原裝PPM板
25.比下位置,很正點:)
26.FT06-C的這個位置,剛好能放進一個5110屏
27.液晶屏的PCB板
28.預期效果
29.PPM控制板焊接完工
30.看背面。底部電源走線,被工廠做板時移錯了位置
31.新到手的5110LCD屏
32.布線時未注意,搞反了液晶的方向:-(
33.液晶屏點亮成功
34.效果怎樣:)
35.安裝右邊電位器
36.右邊
37.安裝左邊電位器
38.左邊
39.液晶、電位器的連線
40.增加的兩個電位器
41.旋鈕安裝好的樣子
42.增加的電位器旋鈕高度
43.工程模式,校準搖桿中立點
44.工作時,顯示前6個通道的PPM有效值
45.從接收機輸出測得的8通道PPM波形
46.在G3.5中試飛測試
航拍一定要注意安全,航拍器摔壞的損失大,是一方面,另一方面,航拍器如果出現故障墜落,就可能會對人造成嚴重危險。相比直升飛機機械部分多,故障點多,槳翼大,總體重量大,多軸航拍器,螺旋槳多,機械部分極少,大多是電子設備控制,飛行完畢應注意檢修。“螺旋槳之間是有氣流影響的,高頻振動下,螺旋槳難免斷裂,那么就會發生“射槳”情況,斷裂的槳飛出去,跟樹葉差不多沒什么損害。但是,飛行器會失去平衡,導致墜機。”如果在較高的高度發現“射槳”,可以馬上推油門,由于力的作用,這樣就可以減小飛行器下降的速度。
---------------------------------------
更多智能硬件技術熱文可關注最新一期《智能硬件特刊》
-
無人機技術
+關注
關注
42文章
189瀏覽量
56251 -
無人機航拍
+關注
關注
1文章
19瀏覽量
10930 -
無人機飛控
+關注
關注
8文章
20瀏覽量
16202
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論