 帶Arduino的旋轉編碼器設計 旋轉編碼器的工作原理和特點
帶Arduino的旋轉編碼器設計 旋轉編碼器的工作原理和特點
一、旋轉編碼器概述
旋轉編碼器(Rotary Encoder),也稱為軸編碼器,是一種將旋轉的機械位移量轉換為電氣信號的傳感器。這些電氣信號經過處理后,可以用于檢測位置、速度等參數。旋轉編碼器廣泛應用于工業控制、機器人技術、精密測量、自動化設備以及計算機輸入設備等領域。作為一種集光機電技術于一體的速度位移傳感器,旋轉編碼器具有高精度、高分辨率、長壽命和穩定可靠等優點。
二、旋轉編碼器的工作原理
旋轉編碼器的工作原理主要基于光電轉換或磁電轉換技術。以光電式旋轉編碼器為例,其工作原理簡述如下:
- 光電轉換過程 :
- 信號處理 :
- 接收到的初始電信號經過后續電路的處理,如放大、整形等,最終輸出為脈沖信號或代碼信號。這些信號可以直接被控制系統讀取和處理。
- 方向判斷與計數 :
- 對于增量式旋轉編碼器,通常會有A、B兩相輸出信號,且兩相信號之間存在90度的相位差。通過檢測A、B兩相信號的相位關系,可以判斷旋轉編碼器的旋轉方向。
- 同時,通過計數A相或B相信號的脈沖數量,可以計算出旋轉編碼器的旋轉角度或位移量。
- 零位脈沖 :
- 部分旋轉編碼器還會提供一個Z相信號作為零位脈沖。每當旋轉編碼器旋轉一圈時,Z相信號會輸出一個脈沖,用于校準或作為參考零位。 # 三、旋轉編碼器的特點
旋轉編碼器作為一種高精度、高可靠性的傳感器,具有以下顯著特點:
- 高精度與高分辨率 :
- 旋轉編碼器能夠精確地將旋轉的機械位移量轉換為電氣信號,具有較高的測量精度和分辨率。例如,光學式增量型編碼器可以有較高的單圈脈沖數,如2500到10000個脈沖,從而實現對旋轉角度或位移量的精細測量。
- 長壽命與穩定性 :
- 旋轉編碼器采用無觸點的光電或磁電轉換技術,避免了傳統機械接觸式傳感器因磨損而導致的性能下降問題。因此,旋轉編碼器具有較長的使用壽命和穩定的性能表現。
- 多功能性 :
- 旋轉編碼器不僅可以測量旋轉角度或位移量,還可以根據輸出信號的頻率計算出旋轉速度。此外,通過配合其他傳感器或控制系統,還可以實現更復雜的功能和自動化控制。
- 適應性強 :
- 旋轉編碼器具有多種類型和規格可供選擇,如增量式、絕對值式、單路輸出、雙路輸出等。這些不同類型的旋轉編碼器可以適應不同的應用場景和測量需求。
- 易于安裝與維護 :
- 旋轉編碼器體積小、重量輕、結構緊湊,易于安裝在各種機械設備上。同時,由于其無觸點的設計特點,使得旋轉編碼器的維護成本相對較低。
- 抗干擾能力強 :
- 旋轉編碼器采用光電或磁電轉換技術,信號傳輸過程中不易受到外界電磁干擾的影響。因此,旋轉編碼器在惡劣的工業環境中也能保持穩定的性能表現。
四、旋轉編碼器的應用領域
旋轉編碼器因其高精度、高分辨率和穩定可靠的性能特點,在多個領域得到了廣泛應用:
- 工業自動化 :
- 機器人技術 :
- 在機器人技術中,旋轉編碼器被廣泛應用于關節角度的測量和控制。通過精確測量機器人關節的旋轉角度和速度,可以實現對機器人姿態和運動軌跡的精確控制。
- 精密測量 :
- 在精密測量領域,如光學儀器、精密機床等場合中,旋轉編碼器常被用于測量微小的旋轉角度或位移量。其高精度和高分辨率的特點使得測量結果更加準確可靠。
- 計算機輸入設備 :
- 在計算機輸入設備中,如鼠標和軌跡球等裝置中,也常采用旋轉編碼器來檢測用戶的旋轉操作。通過測量旋轉編碼器的旋轉角度和速度等參數,可以實現對光標位置的精確控制。
五、旋轉編碼器的分類
旋轉編碼器根據其工作原理和輸出信號的特點,可以大致分為以下幾類:
- 增量式旋轉編碼器 :
- 增量式旋轉編碼器是最常見的一種類型。它輸出的是與旋轉角度增量成正比的脈沖信號。通過檢測A、B兩相的脈沖數量和相位差,可以確定旋轉的方向和角度。增量式編碼器結構簡單,成本較低,但每次上電或復位后,需要借助外部設備或算法來確定起始位置。
- 絕對值式旋轉編碼器 :
- 絕對值式旋轉編碼器在旋轉過程中,每個角度位置都對應一個唯一的編碼值。即使斷電或重啟,也能直接讀取當前的角度位置,無需重新校準。這種編碼器通常使用二進制、格雷碼或BCD碼等方式進行編碼,具有較高的抗干擾能力和可靠性。
- 混合式旋轉編碼器 :
- 單圈與多圈旋轉編碼器 :
- 單圈旋轉編碼器只能測量一圈內的旋轉角度或位移量。而多圈旋轉編碼器則能夠記錄并輸出多圈旋轉的累積值,適用于需要大范圍旋轉測量的場合。
六、旋轉編碼器的選型與應用注意事項
- 精度與分辨率 :
- 根據應用需求選擇合適的精度和分辨率。精度要求高的場合應選擇高分辨率的編碼器。
- 輸出信號類型 :
- 根據控制系統或處理電路的兼容性,選擇合適的輸出信號類型(如TTL、HTL、RS-422等)。
- 工作環境 :
- 考慮工作環境中的溫度、濕度、振動、電磁干擾等因素,選擇適合該環境的編碼器。
- 安裝方式 :
- 根據機械設備的結構和空間限制,選擇合適的安裝方式(如軸向安裝、徑向安裝等)。
- 防護等級 :
- 根據應用場合的防塵、防水需求,選擇具有相應防護等級的編碼器。
- 成本考慮 :
- 在滿足性能要求的前提下,綜合考慮編碼器的成本,選擇性價比高的產品。
七、旋轉編碼器的發展趨勢
隨著工業自動化、智能制造和物聯網技術的快速發展,旋轉編碼器作為重要的傳感器元件,也在不斷地發展和創新。未來,旋轉編碼器的發展趨勢可能包括以下幾個方面:
- 更高精度與更高分辨率 :
- 隨著精密制造技術的進步,旋轉編碼器的精度和分辨率將得到進一步提升,以滿足更高精度的測量需求。
- 智能化與網絡化 :
- 小型化與集成化 :
- 隨著電子元器件的小型化和集成化趨勢,旋轉編碼器也將朝著更小的體積和更高的集成度方向發展,以適應更緊湊的機械設備空間。
- 多功能化與定制化 :
- 根據不同應用場合的特定需求,開發具有多種功能和定制化特性的旋轉編碼器,以滿足用戶的個性化需求。
- 環保與可持續發展 :
- 注重旋轉編碼器的環保性能和可持續發展能力,采用環保材料和節能設計,降低產品的生命周期成本和環境影響。
總之,旋轉編碼器作為工業自動化和精密測量領域中的重要傳感器元件,其性能和應用范圍將隨著技術的不斷進步而不斷拓展。未來,旋轉編碼器將在更多領域發揮重要作用,為智能制造和物聯網技術的發展提供有力支持。
八、帶 Arduino 的旋轉編碼器設計
1、帶 Arduino 的旋轉編碼器設計(一)
旋轉編碼器可用于計數操作,它將旋轉角度轉換為計數數字信號,可以無限制地旋轉360°并給出脈沖輸出。本文將提供基本的 Arduino 旋轉編碼器接口細節以及傳統旋轉編碼器的操作。
旋轉編碼器
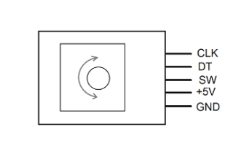
該旋轉編碼器分線板有五個引腳,
- GND → 接地電源
- → +5V 電源
- SW → 按鈕開關
- DT → 編碼器引腳 B
- CLK → 編碼器引腳 A
當軸順時針旋轉時,編碼器引腳 A 處生成與編碼器引腳 B 90° 異相的輸出脈沖。
順便說一句,當軸逆時針旋轉時,編碼器輸出引腳 A 和 B 處生成的輸出會反轉。

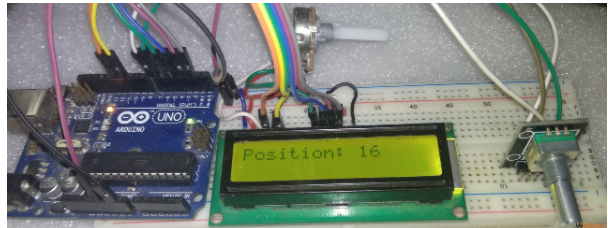
旋轉編碼器Arduino接口

將旋轉編碼器的電源引腳連接到Arduino板,+連接到5V,Gnd連接到Gnd。然后將 CLK(編碼器輸出 A)引腳連接到 Arduino 數字引腳 D2,將 DT(編碼器輸出 B)引腳連接到數字引腳 D1。完成連接后,上傳以下草圖以獲取串行監視器中旋轉編碼器的角度和位置。
旋轉編碼器的 Arduino 代碼
#define encoderOutA 2 // CLK pin of Rotary Enocoder
#define encoderOutB 1 // DT pin of Rotary Enocoder
int counter = 0;
int presentState;
int previousState;
void setup() {
pinMode (encoderOutA,INPUT);
pinMode (encoderOutB,INPUT);
Serial.begin (9600);
previousState = digitalRead(encoderOutA); // Get current state of the encoderOutA
}
void loop() {
presentState = digitalRead(encoderOutA);
if (presentState != previousState)
{
if (digitalRead(encoderOutB) != presentState)
{
counter ++;
}
else {
counter --;
}
Serial.print("Position: ");
Serial.println(counter);
}
previousState = presentState; // Replace previous state of the encoderOutA with the current state
}
在Arduino代碼中,首先定義輸出引腳并將計數初始化為0,然后聲明當前和先前的狀態變量。通過使用“IF”條件循環,獲取旋轉編碼器的當前狀態并與之前的狀態進行比較。如果沒有變化,則計數保持不變,否則,順時針旋轉時計數值增加,逆時針旋轉時計數值減少。
2、帶 Arduino 的旋轉編碼器設計(二)
介紹
為了確定旋轉軸的角位置,使用了稱為旋轉編碼器的傳感器。因此,傳感器根據旋轉產生電信號。該傳感器在包裝、紡織、印刷、機器人等不同行業有著廣泛的應用。因此,在本文中,我們將連接“旋轉編碼器與 Arduino UNO”。旋轉編碼器是電位計的現代化數字等效物,但它們的適應性更強。
概述
硬件概述
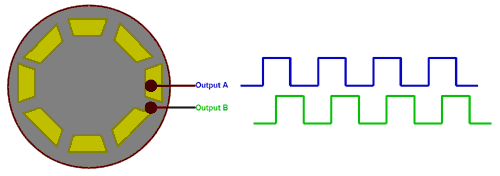
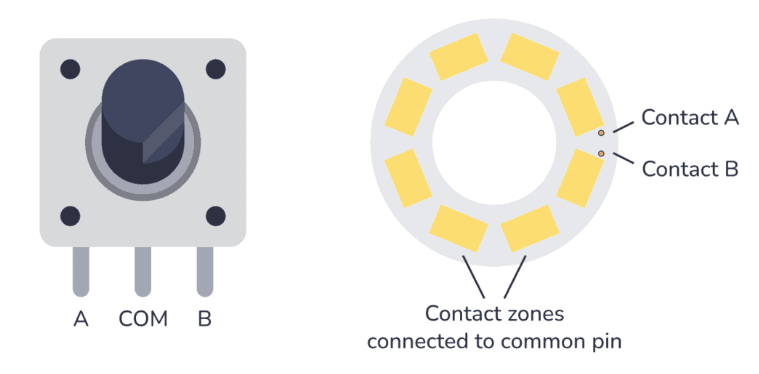
該模塊包括一個圓盤,該圓盤具有連接到公共引腳 C 的等距接觸區域,以及另外兩個接觸引腳 A 和 B。
這個特殊的模塊位于一個帶有五個引腳的分線板上,我們將在本次 Arduino 演示中使用它。第一個是輸出 A 引腳,第二個是輸出 B 引腳,第三個是 Button 引腳,最后兩個引腳是 VCC 和 GND 引腳。
工作準則
當圓盤開始逐步旋轉時,引腳A和B將與公共引腳接觸,從而產生兩個方波輸出信號。如果我們只計算信號的脈沖,我們就可以使用兩個輸出中的任何一個來確定旋轉位置。然而,如果我們希望確定旋轉方向,則必須同時分析兩個信號。
兩個輸出信號始終彼此相差 90 度。如果編碼器順時針旋轉,輸出 A 將領先于輸出 B。
旋轉編碼器和電位器的區別
旋轉電位器和編碼器之間最明顯的區別是,編碼器可以沿任一方向連續旋轉,而電位器只能順時針或逆時針旋轉一定的量,然后必須停止。
因此,當您需要知道旋鈕的確切位置時,電位器是最佳選擇。另一方面,旋轉編碼器適用于您只需要知道位置變化而不是確切位置的情況。
電路原理圖

Arduino代碼
// Rotary Encoder Inputs
#define CLK 2
#define DT 3
#define SW 4
int counter = 0;
int currentStateCLK;
int lastStateCLK;
String currentDir ="";
unsigned long lastButtonPress = 0;
void setup() {
// Set encoder pins as inputs
pinMode(CLK,INPUT);
pinMode(DT,INPUT);
pinMode(SW, INPUT_PULLUP);
// Setup Serial Monitor
Serial.begin(9600);
// Read the initial state of CLK
lastStateCLK = digitalRead(CLK);
}
void loop() {
// Read the current state of CLK
currentStateCLK = digitalRead(CLK);
// If last and current state of CLK are different, then pulse occurred
// React to only 1 state change to avoid double count
if (currentStateCLK != lastStateCLK && currentStateCLK == 1){
// If the DT state is different than the CLK state then
// the encoder is rotating CCW so decrement
if (digitalRead(DT) != currentStateCLK) {
counter --;
currentDir ="CCW";
} else {
// Encoder is rotating CW so increment
counter ++;
currentDir ="CW";
}
Serial.print("Direction: ");
Serial.print(currentDir);
Serial.print(" | Counter: ");
Serial.println(counter);
}
// Remember last CLK state
lastStateCLK = currentStateCLK;
// Read the button state
int btnState = digitalRead(SW);
//If we detect LOW signal, button is pressed
if (btnState == LOW) {
//if 50ms have passed since last LOW pulse, it means that the
//button has been pressed, released and pressed again
if (millis() - lastButtonPress > 50) {
Serial.println("Button pressed!");
}
// Remember last button press event
lastButtonPress = millis();
}
// Put in a slight delay to help debounce the reading
delay(1);
}
工作說明
要了解Arduino UNO的旋轉編碼器,請根據電路圖連接電路或按照連接表進行連接。然后在Arduino IDE中編寫上面給出的代碼,并將其上傳到ARDUINO UNO中。 Arduino 處理代碼并控制編碼器的輸出。因此,您將根據您的代碼觀察旋轉編碼器的旋轉。
代碼說明
- 首先,定義編碼器的引腳,連接到Arduino的不同引腳。例如,CLK引腳連接到Arduino的引腳2,DT連接到引腳3,SW連接到引腳4。然后定義將在代碼中使用的不同變量。變量計數器代表旋轉電位器旋鈕時的計數。變量currentStateCLK和lastStateCLK用于保持 CLK 輸出的狀態。 currentDir 變量已定義為稍后用于在監視器上打印方向。并且,lastButtonPress被定義為消除開關抖動。
- 在 void 設置中,我們已將編碼器的引腳聲明為輸入。此外,為了從 CLK 引腳讀取值,我們提供了digitalRead (CLK ) 函數,并將該讀數存儲在變量lastStateCLK中。
- 在 void 循環中,為了從 CLK 引腳讀取當前狀態,我們再次提供函數 digitalRead (CLK), 并將其存儲在currentStateCLK中。然后我們給出if語句,將lastStateCLK與 currentStateCLK進行比較,以確定旋轉的狀態方向。如果不同,則說明旋鈕為逆時針方向。然后我們將電流設置為 CWW。如果相等,則說明旋鈕為順時針方向。然后我們將 currentDir 設置為 CW。之后,我們用當前狀態更新lastStateCLK。然后我們讀取開關按鈕狀態并給出 if 函數。并且,根據該函數,如果按鈕保持低電平超過 50 毫秒,則會打印Button Pressed在串行監視器上。 ## 應用及用途
- 在傳送帶中控制速度和方向。
- 它可用于在各種電子項目中將大量輸入壓縮為少量輸出。
- 擠壓機、壓力機、焊機和不同的自動化金屬成型機械。
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753069 -
旋轉編碼器
+關注
關注
5文章
158瀏覽量
25953 -
Arduino
+關注
關注
188文章
6468瀏覽量
186952
發布評論請先 登錄
相關推薦
Arduino開發板的旋轉編碼器如何使用
什么是旋轉編碼器 旋轉編碼器的工作原理


旋轉編碼器能直接換嗎_旋轉編碼器更換注意事項

旋轉編碼器的工作原理,旋轉編碼器的作用功能及應用





 工商網監
工商網監
評論