

伴隨著智能視頻分析系統(tǒng)的迅速進(jìn)步和執(zhí)行,安全性監(jiān)控的廣泛運(yùn)用激發(fā)了智能視頻分析系統(tǒng)和分析技術(shù)性的逐步推進(jìn)科學(xué)研究。在各方面的真實(shí)運(yùn)用中,將人工智能視頻分析關(guān)鍵技術(shù)于傳統(tǒng)式視頻監(jiān)控行業(yè)已變?yōu)橥瓿僧?dāng)代技術(shù)性綜合性視頻管理方法的硬性需求。智能視頻分析系統(tǒng)是一種涉及到數(shù)字圖像處理、計(jì)算機(jī)視覺(jué)、人工智能等方面的智能視頻分析商品。它可以分析視頻地區(qū)、物件遺留下或遺失、逆向行駛、群體相對(duì)密度出現(xiàn)異常等異常現(xiàn)象,并立即推送警報(bào)信息內(nèi)容。
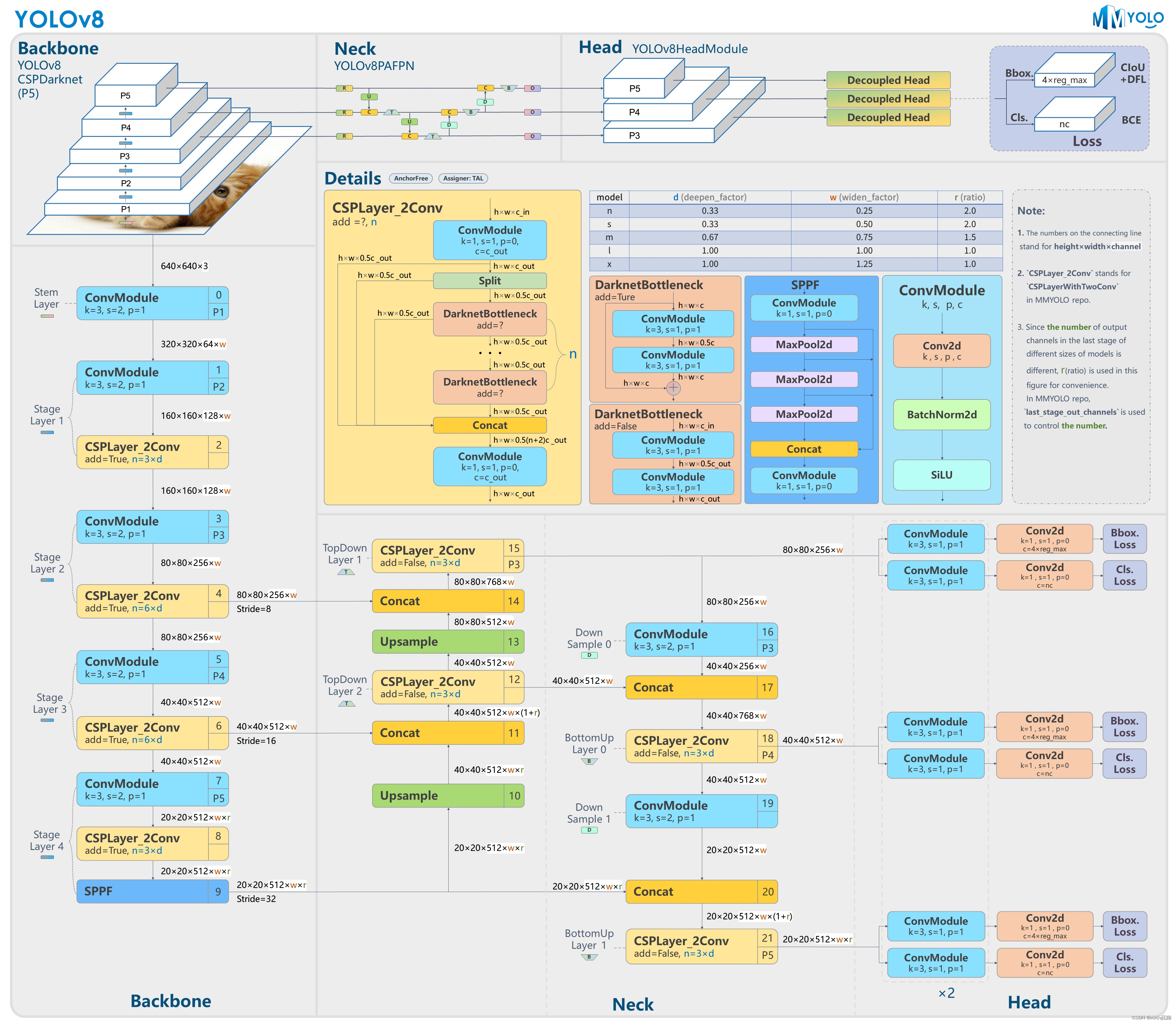
現(xiàn)代目標(biāo)檢測(cè)器大部分都會(huì)在正負(fù)樣本分配策略上面做文章,典型的如 YOLOX 的 simOTA、TOOD 的 TaskAlignedAssigner 和 RTMDet 的 DynamicSoftLabelAssigner,這類 Assigner 大都是動(dòng)態(tài)分配策略,而 YOLOv5 采用的依然是靜態(tài)分配策略。考慮到動(dòng)態(tài)分配策略的優(yōu)異性,YOLOv8 算法中則直接引用了 TOOD 的 TaskAlignedAssigner。TaskAlignedAssigner 的匹配策略簡(jiǎn)單總結(jié)為: 根據(jù)分類與回歸的分?jǐn)?shù)加權(quán)的分?jǐn)?shù)選擇正樣本。
智能視頻分析系統(tǒng)可以識(shí)別個(gè)人行為分析涉及到多種多樣優(yōu)化算法,包含深度學(xué)習(xí)算法、視頻結(jié)構(gòu)型技術(shù)性、圖像識(shí)別算法、面部較為優(yōu)化算法、身體鑒別優(yōu)化算法、畫(huà)面活體算法、AI3D畫(huà)面矯正算法、人或物體移動(dòng)偵測(cè)算法、視覺(jué)圖像比對(duì)算法、圖片物體前后軌跡算法、人體跟蹤算法等。
class Conv(nn.Module): # 標(biāo)準(zhǔn)的卷積 參數(shù)(輸入通道數(shù), 輸出通道數(shù), 卷積核大小, 步長(zhǎng), 填充, 組, 擴(kuò)張, 激活函數(shù)) default_act = nn.SiLU() # 默認(rèn)的激活函數(shù) def __init__(self, c1, c2, k=1, s=1, p=None, g=1, d=1, act=True): super().__init__() self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p, d), groups=g, dilation=d, bias=False) # 2維卷積,其中采用了自動(dòng)填充函數(shù)。 self.bn = nn.BatchNorm2d(c2) # 使得每一個(gè)batch的特征圖均滿足均值為0,方差為1的分布規(guī)律 # 如果act=True 則采用默認(rèn)的激活函數(shù)SiLU;如果act的類型是nn.Module,則采用傳入的act; 否則不采取任何動(dòng)作 (nn.Identity函數(shù)相當(dāng)于f(x)=x,只用做占位,返回原始的輸入)。 self.act = self.default_act if act is True else act if isinstance(act, nn.Module) else nn.Identity() def forward(self, x): # 前向傳播 return self.act(self.bn(self.conv(x))) # 采用BatchNorm def forward_fuse(self, x): # 用于Model類的fuse函數(shù)融合 Conv + BN 加速推理,一般用于測(cè)試/驗(yàn)證階段 return self.act(self.conv(x)) # 不采用BatchNorm
目前傳統(tǒng)式的視頻監(jiān)控大多數(shù)起著調(diào)查取證的功效,不可以具有防止和預(yù)警信息的功效。選用視覺(jué)效果人工智能視頻個(gè)人行為分析技術(shù)性,可完成即時(shí)分析、實(shí)時(shí)鑒別和即時(shí)預(yù)警信息,鑒別視頻中必須預(yù)警信息的操作和姿態(tài),達(dá)到安全性監(jiān)控情景中不安全行為鑒別的必須。它轉(zhuǎn)變了過(guò)去視頻處于被動(dòng)監(jiān)控的情況,不但僅限于給予視頻照片,還積極智能分析、鑒別和區(qū)別視頻信息內(nèi)容,可以訂制事情種類,一旦出現(xiàn)異常或緊急狀況可以立即警報(bào),其在安全領(lǐng)域的運(yùn)用將必然地有利于擺脫人力資源疲憊的局限,進(jìn)而更合理地協(xié)助安全性工作人員解決緊急狀況。
-
行為分析
+關(guān)注
關(guān)注
0文章
36瀏覽量
1888 -
人工智能算法
+關(guān)注
關(guān)注
0文章
62瀏覽量
5491 -
視頻圖像識(shí)別
+關(guān)注
關(guān)注
0文章
8瀏覽量
2041
發(fā)布評(píng)論請(qǐng)先 登錄
OpenVINO C#如何運(yùn)行YOLO11實(shí)例分割模型

如何修改yolov8分割程序中的kmodel?
labview調(diào)用yolov8/11目標(biāo)檢測(cè)、分割、分類
RV1126 yolov8訓(xùn)練部署教程
RV1126 yolov8訓(xùn)練部署教程
RK3576 Yolov11訓(xùn)練部署教程

訊維AI視頻行為分析系統(tǒng):打造全方位智能安防解決方案

AI視頻行為分析系統(tǒng):重塑安全監(jiān)控的智能化未來(lái)!

高效識(shí)別,智能分析,訊維AI視頻行為分析系統(tǒng)開(kāi)啟智慧監(jiān)控時(shí)代!

YOLOv8中的損失函數(shù)解析
RK3588 技術(shù)分享 | 在Android系統(tǒng)中使用NPU實(shí)現(xiàn)Yolov5分類檢測(cè)
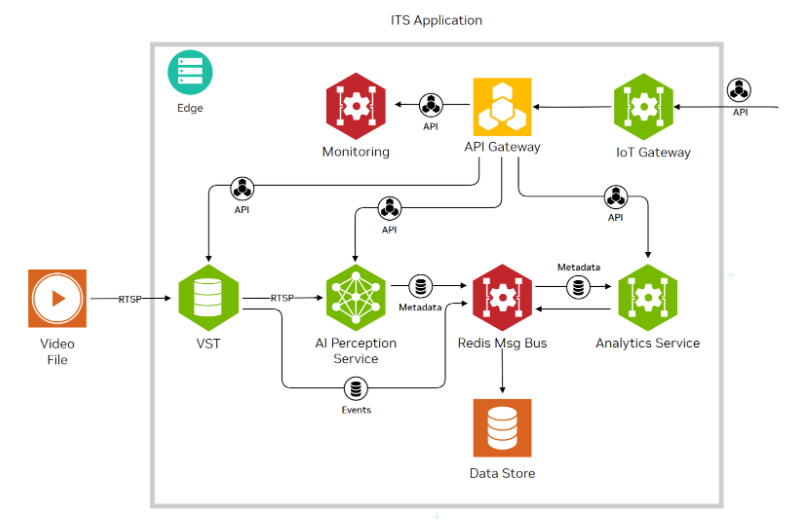
使用NVIDIA JetPack 6.0和YOLOv8構(gòu)建智能交通應(yīng)用
RK3588 技術(shù)分享 | 在Android系統(tǒng)中使用NPU實(shí)現(xiàn)Yolov5分類檢測(cè)
工廠視頻智能分析系統(tǒng)解決方案 TensorFlow






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論