


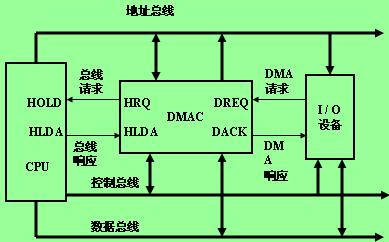
直接存儲器訪問(DMA,Direct Memory Access)的優點
· 提高系統效率:通過繞過CPU,DMA顯著減少了數據傳輸對CPU資源的占用,使得CPU能夠專注于其他計算任務,提升了系統整體的響應速度和處理能力。
·加快數據傳輸速度:針對多總線高性能MCU,DMA可以避免不同總線同步問題,提供更高的數據傳輸速率。
·降低系統延遲:由于減少了CPU參與數據搬運的環節,系統延遲顯著降低,這對于實時系統和高性能計算應用至關重要,確保了數據的即時處理和反饋。
·簡化軟件設計:DMA控制器的硬件自動化處理降低了軟件層面對數據傳輸的復雜管理,使得軟件設計更為簡潔,降低了開發難度和維護成本。
先楫產品中,有大量支持DMA的設備,其中USB、Ethernet、ADC、DAC等有自己的內部DMA,AHB和AXI總線上還有公共的DMA設備——HDMA、XDMA。
HDMA、XDMA都是多通道DMA,可以通過DMAMUX實現多通道的數據傳輸。
HDMA、XDMA分別接入AHB和AXI總線,在總線內部傳輸效率更高,可以支持8-64bit數據寬度的傳輸。
本文將通過兩個應用案例,說明DMA在如何在實時控制中提高系統的穩定性和實時性。
DMA準確控制
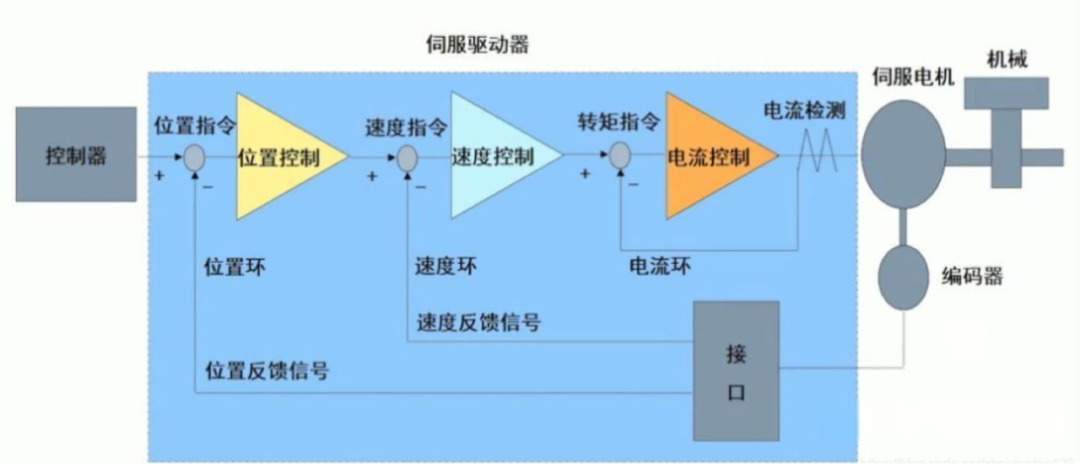
下圖是典型伺服三環的控制框圖,其中編碼器是控制的關鍵反饋,除了準確讀取位置之外,還需要通過不同時刻讀取位置計算轉速。讀取位置的時刻在伺服閉環中占非常關鍵的作用。
常見位置讀取方式是在定時中斷中讀取位置,確保讀取間隔時刻一致。但由于軟件響應時間不確定,讀取間隔很難保證一致。
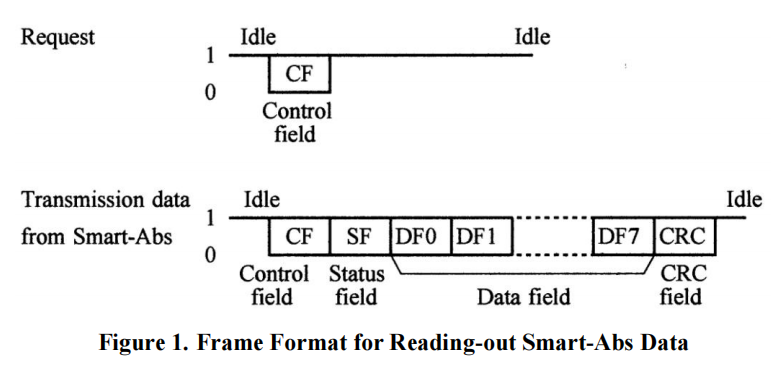
本文通過DMA+鏈表方式實現HPM6200用串口與多摩川編碼器定時通訊的方式。多摩川編碼器通訊協議見下圖:
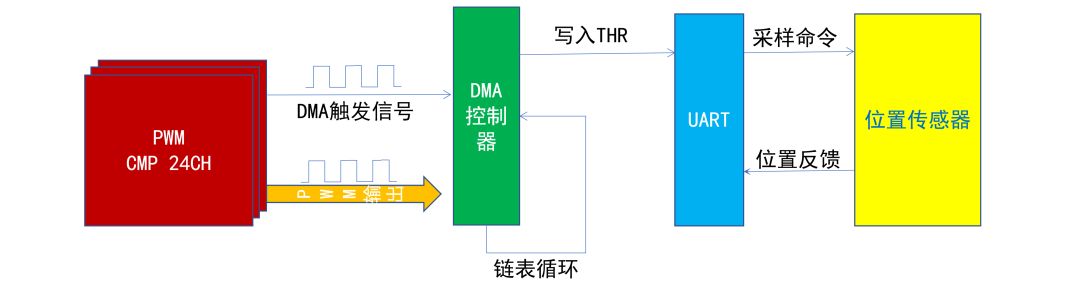
例程通過PWM定期觸發DMA,由DMA啟動串口讀取動作。DMA動作完成后利用鏈式傳輸,可以在處理器不介入的情況下,連續完成多個不同配置的傳輸任務。
程序中使用了PWM、DMA、UART三個模塊
· PWM負責定時輸出DMA觸發信號;
· DMA接收觸發信號后將采樣命令寫入UART的THR寄存器;
· UART負責收發位置傳感器信息,其中接收建議使用硬件idle+FIFO模式。
先楫的UART有硬件收發使能控制,只需要DE設置為有效,485通訊可以自動實現收發方向控制,無須CPU干預。
HPMICRO
HPM6280集成了9個UART模塊:
除了常規配置之外,還支持硬件空閑中斷
支持16 字節的 TXFIFO 和 RXFIFO
硬件收發使能自動控制
通過簡單配置即可實現2.5Mbps通訊、RS485自動收發使能控制、硬件空閑中斷接收數據等功能。
void config_uart(void)
{
hpm_stat_t stat;
uart_config_t config = {0};
/* if TEST_UART is same as BOARD_CONSOLE_BASE, it has been initialized in board_init(); */
uart_default_config(HPM_UART7, &config);
config.baudrate = 2500000UL;
config.fifo_enable = true;
//config.dma_enable = true;
clock_set_source_divider(clock_uart7, clk_src_pll0_clk0, 5);//80Mhz
clock_add_to_group(clock_uart7, 0);
config.src_freq_in_hz = clock_get_frequency(clock_uart7);//clock_get_frequency(clock_uart0);
config.rx_fifo_level = uart_rx_fifo_trg_gt_three_quarters;/* this config should not change *///uart_rx_fifo_trg_not_empty;
config.rxidle_config.detect_enable = true;
config.rxidle_config.detect_irq_enable = true;
config.rxidle_config.idle_cond = uart_rxline_idle_cond_rxline_logic_one;
config.rxidle_config.threshold = 20U; /* 20bit */
stat = uart_init(HPM_UART7, &config);
if (stat != status_success) {
printf("failed to initialize uart\n");
}
//uart_enable_irq(HPM_UART0, uart_intr_rx_data_avail_or_timeout);
intc_m_enable_irq_with_priority(IRQn_UART7, 1);
}
HPMICRO
下面DMA配置啟用了鏈式傳輸,實現DMA循環觸發UART讀取位置信息。
構建兩個相互鏈接的 DMA 任務描述符列表。DMA控制器會在完成當前任務描述符的相應任務后,從 ChnLLPointer指向地址取下一個任務描述符。下一個任務描述符又關聯當前描述符,如此互鎖,無限循環。
描述符中DMA配置目標數據為握手模式,UART設備返回接收數據完畢信號。
為確保uart數據可以準確傳輸,DMA的高優先級標志位要設置為1。
{
hpm_stat_t stat;
dma_channel_config_t rx_ch_config = { 0 };
dmamux_config(HPM_DMAMUX, ch_num, HPM_DMA_SRC_MOT0_0, true);
/* 1.1 config chain descriptors */
dma_default_channel_config(HPM_HDMA, &rx_ch_config);
rx_ch_config.src_addr = src;
rx_ch_config.src_width = DMA_TRANSFER_WIDTH_BYTE; /* In DMA handshake case, source width and destination width must be BYTE. */
rx_ch_config.src_addr_ctrl = DMA_ADDRESS_CONTROL_INCREMENT;
rx_ch_config.src_mode = DMA_HANDSHAKE_MODE_NORMAL;
rx_ch_config.dst_addr = (uint32_t)&uart_ptr->THR;
rx_ch_config.dst_width = DMA_TRANSFER_WIDTH_BYTE; /* In DMA handshake case, source width and destination width must be BYTE. */
rx_ch_config.dst_addr_ctrl = DMA_ADDRESS_CONTROL_FIXED;
rx_ch_config.dst_mode = DMA_HANDSHAKE_MODE_HANDSHAKE;
rx_ch_config.size_in_byte = 1;
rx_ch_config.priority = 1;
rx_ch_config.src_burst_size = DMA_NUM_TRANSFER_PER_BURST_1T; /* In DMA handshake case, source burst size must be 1 transfer, that is 0. */
rx_ch_config.linked_ptr = core_local_mem_to_sys_address(HPM_CORE0, (uint32_t)&descriptors[1]);//link to next dma action
stat = dma_config_linked_descriptor(HPM_HDMA, &descriptors[0], ch_num, &rx_ch_config);
if (stat != status_success) {
while (1) {
};
}
rx_ch_config.linked_ptr = core_local_mem_to_sys_address(HPM_CORE0, (uint32_t)&descriptors[0]);
stat = dma_config_linked_descriptor(HPM_HDMA, &descriptors[1], ch_num, &rx_ch_config);
if (stat != status_success) {
while (1) {
};
}
HPMICRO
在PWM中配置DMA定期觸發,配置比較器匹配觸發,配置DMA輸出使能。
互聯管理器TRGM是HPM MCU中非常有特色的外設,可以通過配置實現多個外設的輸入輸出相互連接,使得多個外設可以相互配合使用。
HPM6200中TRGM支持4個DMA 請求輸出,用戶可以配置TRGM,從多個DMA請求輸入中,選擇4個連接到 DMAMUX。本文選擇了PWM0的CMP14。
pwm_set_reload(HPM_PWM0, 0, reload);
pwm_set_start_count(HPM_PWM0, 0, 0);
pwm_set_load_counter_shadow_register_trigger(HPM_PWM0,pwm_shadow_register_update_on_modify,0);
/*
* config cmp1 and cmp2
*/
cmp_config[0].mode = pwm_cmp_mode_output_compare;
cmp_config[0].cmp = reload + 1;
cmp_config[0].update_trigger = pwm_shadow_register_update_on_hw_event;
cmp_config[1].mode = pwm_cmp_mode_output_compare;
cmp_config[1].cmp = reload + 1;
cmp_config[1].update_trigger = pwm_shadow_register_update_on_hw_event;
cmp_config[2].mode = pwm_cmp_mode_output_compare;//channel to update compare shadow
cmp_config[2].cmp = reload;
cmp_config[2].update_trigger = pwm_shadow_register_update_on_modify;
cmp_config[3].mode = pwm_cmp_mode_output_compare;//dma trigger channel
cmp_config[3].cmp = reload-100;
cmp_config[3].update_trigger = pwm_shadow_register_update_on_modify;
pwm_get_default_pwm_pair_config(HPM_PWM0, &pwm_pair_config);
pwm_pair_config.pwm[0].enable_output = true;
pwm_pair_config.pwm[0].dead_zone_in_half_cycle = 8000;
pwm_pair_config.pwm[0].invert_output = false;
pwm_pair_config.pwm[1].enable_output = true;
pwm_pair_config.pwm[1].dead_zone_in_half_cycle = 16000;
pwm_pair_config.pwm[1].invert_output = false;
/*
* config pwm
*/
if (status_success != pwm_setup_waveform_in_pair(HPM_PWM0, 0, &pwm_pair_config, cmp_index, cmp_config, 2)) {
printf("failed to setup waveform\n");
while(1);
}
//====================set dma trriger from cmp[14]============================
pwm_config_cmp(HPM_PWM0, 14, &cmp_config[3]);//dma trigger
pwm_enable_dma_request(HPM_PWM0,1<<14);//enable pwm signal output to dma
trgm_dma_request_config(HPM_TRGM0,0,14);//connect cmp14 to HPM_DMA_SRC_MOT0_0
HPMICRO
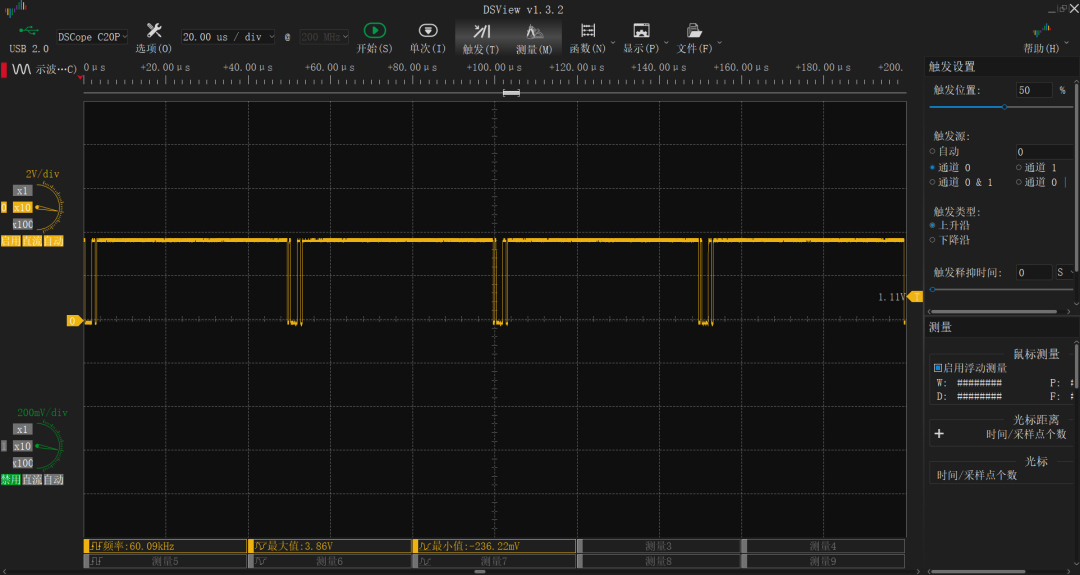
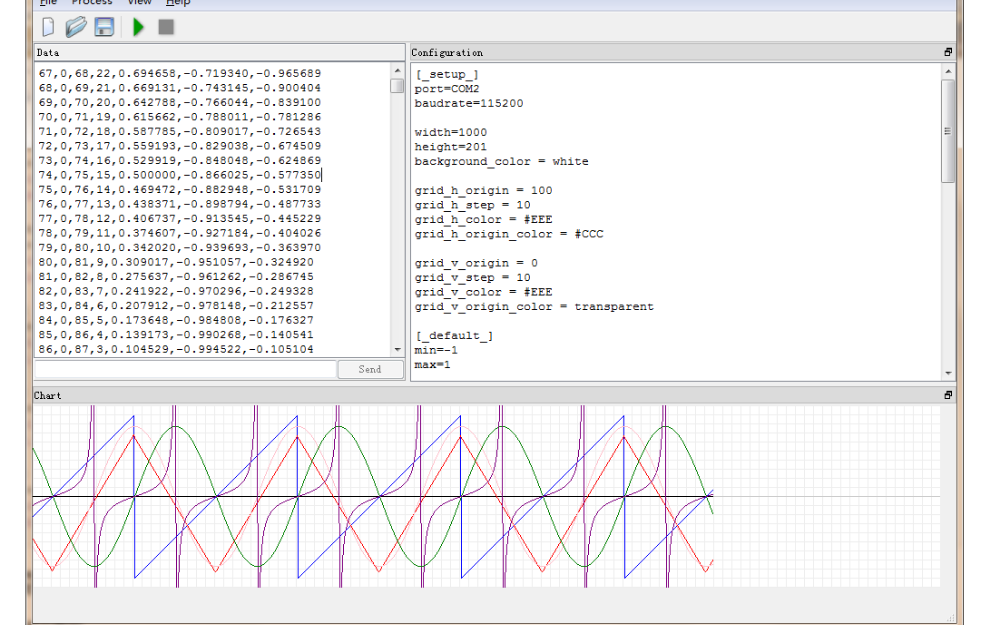
下圖是DMA以20kHz觸發UART定期輸出的波形,定期輸出0X1A,讀取多摩川傳感器中全部信息。
DMA加速傳輸
HPM5300、HPM6800、HPM6E00引入了DMAv2,增加了無限循環、DMA傳輸一半中斷,并修改了burst傳輸長度定義。
下文將列舉一個buck-boost電源應用通過DMAv2更新PWM的例子,演示DMA加速傳輸的方法和效果。
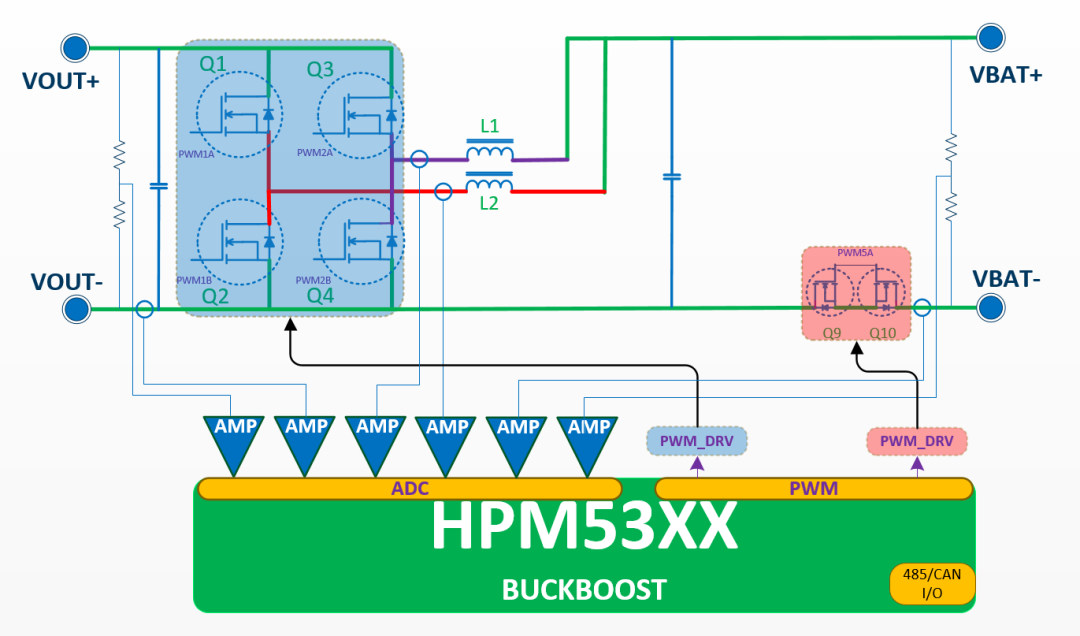
例程選用了兩路交錯buck-boost電路。
高效電源對功率密度有更高的要求,更高的開關頻率可以降低主回路中電感和電容體積,實際應用中,中小功率的電源開關頻率可達100khz以上,頻繁的調節對CPU的運算能力和讀寫外設的速度有更高的要求。
HPM5300單次寫PWM寄存器至少需要5個AHB時鐘(HPM6700、HPM6300時間更長),例程使用了8個PWM比較寄存器,CPU時鐘為480Mhz、AHB總線為160Mhz,連續寫入時至少0.25us,相當于120條CPU clock。
修改PWM刷新方式后,將PWM比較器寄存器的值放入DLM內存中,更新PWM只是占用了CPU 8個訪問高速RAM的時間。
HPMICRO
與HPM6200不同,DMAv2直接支持無限循環模式,CHCTRL[CTRL].INFINITELOOP設置為1即可,不需要鏈表實現無限循環。
將CHCTRL[CTRL].burst_opt配置為1,burst傳輸個數不再是2的指數次方,可以根據實際需要配置。
PWM配置需要清零SHLK[SHLK],影子寄存器鎖定功能。
其它設置與前文配置相同。
void dma_transfer_config(uint8_t DMA_chn, uint8_t PWM_num, uint32_t* CMP0)
{
//---------------configure dma channel-----------------
dma_channel_config_t ch_config = {0};
DMA_chn &= 0x1F;
dma_disable_channel(HPM_HDMA, DMA_chn);//stop channel
dmamux_config(HPM_DMAMUX, DMA_chn, HPM_DMA_SRC_MOT_0, true);//trigger source is from trgms dmacfg0
//dma_reset(APP_GPTMR_DMA);
//---------------configure dma chn0-----------------
dma_default_channel_config(HPM_HDMA, &ch_config);
ch_config.src_addr = core_local_mem_to_sys_address(HPM_CORE0, (uint32_t)&PWM_DMA_struct);//source address
//ch_config.dst_addr = (uint32_t)&HPM_PWM0->CMP[0];//destination address
ch_config.dst_addr = (uint32_t)CMP0;//destination address
ch_config.src_mode = DMA_HANDSHAKE_MODE_HANDSHAKE;//hand shake mode waiting trigger signal
ch_config.src_width = DMA_TRANSFER_WIDTH_WORD;// 32bit
ch_config.src_addr_ctrl = DMA_ADDRESS_CONTROL_INCREMENT;
ch_config.burst_opt = DMA_SRC_BURST_OPT_CUSTOM_SIZE;//burst size is actural number rather than 2^num
ch_config.src_burst_size = PWM_num;
ch_config.dst_width = DMA_TRANSFER_WIDTH_WORD;//32bit
ch_config.dst_addr_ctrl = DMA_ADDRESS_CONTROL_INCREMENT;
ch_config.dst_mode = DMA_HANDSHAKE_MODE_NORMAL;//normal
ch_config.en_infiniteloop = true;//dma will react if transize has been completed
ch_config.size_in_byte = PWM_num*4;
ch_config.linked_ptr = 0;//no link
if (status_success != dma_setup_channel(HPM_HDMA, DMA_chn, &ch_config, true)) {
printf(" dma setup channel failed\n");
return;
}
}
HPM系列MCU包含了強大互聯管理器和DMA模塊,可以輕松實現外設無限循環的觸發DMA,不需要占用CPU時間每次配置DMA觸發外設。
DMA直接觸發外設動作,將極大提高系統動作的一致性。伺服客戶對比之前中斷觸發讀取位置與DMA觸發讀取位置效果:在2000rpm時,中斷觸發讀取位置得到的計算最大瞬時轉速波動為20rpm,改為DMA觸發后波動降為2rpm。
微逆應用中,同時變頻、變占空比時,通過DMA定時修改PWM比較器和周期寄存器數值消除了同時修改后造成的波形偶發異常問題。
電源應用中,開關頻率往往超過100kHz,對CPU的利用率要求更高,且對PWM、ACMP讀寫頻率和內容更多,DMA讀寫可以有限減輕CPU負擔,提高CPU效率。
-
mcu
+關注
關注
146文章
17994瀏覽量
367764 -
存儲器
+關注
關注
38文章
7653瀏覽量
167570 -
dma
+關注
關注
3文章
576瀏覽量
103353 -
實時控制
+關注
關注
0文章
37瀏覽量
9712
發布評論請先 登錄
ZYNQ開發案例之DMA控制器系統設計
28335的McBSP的DMA控制如何實現?
DMA與DMA控制器
DMA在實時圖像處理中的應用
采用DSP的DMA控制技術分析
基于DMA控制器的UART串行通信設計

實時圖像處理系統的DMA控制器設計

Crossbar的多通道DMA控制器設計
dma控制器芯片8257資料介紹

dma控制器由什么組成
dma控制器的組成
dma控制器是什么_dma控制器工作方式
STM32使用DMA控制器試驗總結






 工商網監
工商網監

評論