 方向轉角傳感器安裝在什么位置
方向轉角傳感器安裝在什么位置
方向轉角傳感器,又稱為角度傳感器或旋轉傳感器,是一種用于測量旋轉角度的傳感器。它可以廣泛應用于汽車、機器人、航空航天、工業自動化等領域。
- 方向轉角傳感器的工作原理
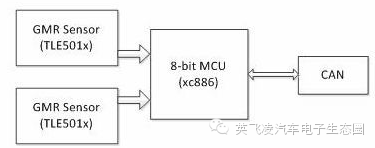
方向轉角傳感器的工作原理是通過測量旋轉物體的角度變化來實現對角度的測量。常見的方向轉角傳感器有光電式、磁電式、電容式、電阻式等。其中,光電式方向轉角傳感器是最常見的一種,其工作原理是利用光電元件將旋轉物體的旋轉角度轉換為電信號。
- 方向轉角傳感器的安裝位置
方向轉角傳感器的安裝位置取決于其應用場景和測量對象。以下是一些常見的安裝位置:
2.1 汽車領域
在汽車領域,方向轉角傳感器通常安裝在以下幾個位置:
2.1.1 方向盤轉角傳感器
方向盤轉角傳感器安裝在方向盤下方,用于測量駕駛員轉動方向盤的角度,從而控制汽車的轉向系統。這種傳感器通常采用非接觸式測量方式,以避免對方向盤的磨損。
2.1.2 輪胎轉角傳感器
輪胎轉角傳感器安裝在車輪的輪轂上,用于測量車輪的旋轉角度,從而實現對汽車行駛方向的控制。這種傳感器通常采用磁電式或光電式測量方式。
2.1.3 驅動軸轉角傳感器
驅動軸轉角傳感器安裝在汽車的驅動軸上,用于測量驅動軸的旋轉角度,從而實現對汽車行駛速度和方向的控制。這種傳感器通常采用磁電式或光電式測量方式。
2.2 機器人領域
在機器人領域,方向轉角傳感器通常安裝在以下幾個位置:
2.2.1 關節轉角傳感器
關節轉角傳感器安裝在機器人的關節處,用于測量關節的旋轉角度,從而實現對機器人運動的控制。這種傳感器通常采用磁電式或光電式測量方式。
2.2.2 手腕轉角傳感器
手腕轉角傳感器安裝在機器人的手腕處,用于測量手腕的旋轉角度,從而實現對機器人手部運動的控制。這種傳感器通常采用磁電式或光電式測量方式。
2.3 航空航天領域
在航空航天領域,方向轉角傳感器通常安裝在以下幾個位置:
2.3.1 翼面轉角傳感器
翼面轉角傳感器安裝在飛機的翼面上,用于測量翼面的旋轉角度,從而實現對飛機飛行姿態的控制。這種傳感器通常采用磁電式或光電式測量方式。
2.3.2 發動機轉角傳感器
發動機轉角傳感器安裝在飛機發動機的轉子上,用于測量發動機的旋轉角度,從而實現對發動機運行狀態的監控。這種傳感器通常采用磁電式或光電式測量方式。
2.4 工業自動化領域
在工業自動化領域,方向轉角傳感器通常安裝在以下幾個位置:
2.4.1 機械臂轉角傳感器
機械臂轉角傳感器安裝在工業機器人的機械臂上,用于測量機械臂的旋轉角度,從而實現對機器人運動的控制。這種傳感器通常采用磁電式或光電式測量方式。
2.4.2 傳送帶轉角傳感器
傳送帶轉角傳感器安裝在工業生產線的傳送帶上,用于測量傳送帶的旋轉角度,從而實現對生產線運行狀態的監控。這種傳感器通常采用磁電式或光電式測量方式。
- 方向轉角傳感器的安裝方法
3.1 確定安裝位置
在安裝方向轉角傳感器之前,需要根據應用場景和測量對象確定傳感器的安裝位置。可以參考上述安裝位置的介紹,選擇合適的安裝位置。
3.2 準備安裝工具
安裝方向轉角傳感器需要一些基本的工具,如螺絲刀、扳手、電鉆等。確保工具齊全并處于良好狀態,以便于安裝過程的順利進行。
3.3 安裝傳感器
根據傳感器的類型和安裝位置,采用適當的安裝方法。以下是一些常見的安裝方法:
3.3.1 固定式安裝
固定式安裝是將傳感器固定在測量對象上,使其與測量對象同步旋轉。這種安裝方法適用于大多數方向轉角傳感器,如光電式、磁電式等。
3.3.2 非接觸式安裝
非接觸式安裝是將傳感器安裝在測量對象附近,通過傳感器與測量對象之間的相對位置變化來測量角度。這種安裝方法適用于一些特殊場合,如方向盤轉角傳感器等。
3.3.3 嵌入式安裝
嵌入式安裝是將傳感器嵌入到測量對象內部,使其與測量對象成為一個整體。這種安裝方法適用于一些對空間要求較高的場合,如發動機轉角傳感器等。
-
工業自動化
+關注
關注
17文章
2419瀏覽量
67284 -
電信號
+關注
關注
1文章
822瀏覽量
20608 -
磁電式
+關注
關注
0文章
9瀏覽量
1971
發布評論請先 登錄
相關推薦
曲軸位置傳感器類型都有哪些
碰撞傳感器的種類與安裝位置
曲軸位置傳感器有哪些類型
車速傳感器安裝位置
關于方向盤轉角傳感器(SAS)的性能分析
曲軸位置傳感器的工作原理
曲軸位置傳感器及凸輪軸位置傳感器常見故障及檢測
角度傳感器安裝在挖掘機的什么位置





 工商網監
工商網監
評論