") 減小系統(tǒng)穩(wěn)態(tài)誤差的方法有哪些?
減小系統(tǒng)穩(wěn)態(tài)誤差的方法有哪些?
- 引言
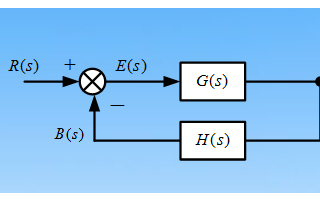
在控制系統(tǒng)中,穩(wěn)態(tài)誤差是指系統(tǒng)在穩(wěn)態(tài)條件下,輸出與期望值之間的偏差。減小穩(wěn)態(tài)誤差對(duì)于提高系統(tǒng)的控制精度和性能至關(guān)重要。
- 系統(tǒng)穩(wěn)態(tài)誤差的概念
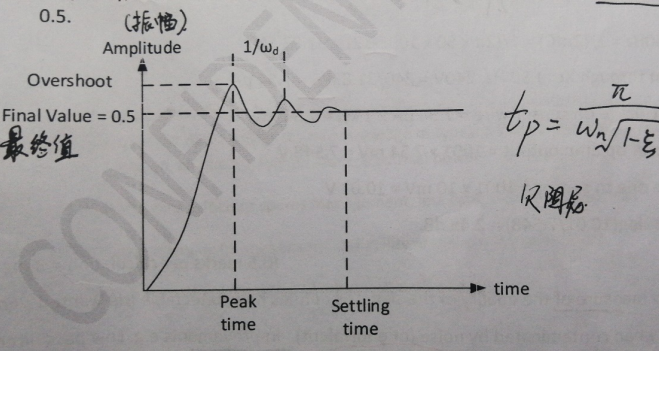
穩(wěn)態(tài)誤差是指在系統(tǒng)達(dá)到穩(wěn)態(tài)后,輸出與期望值之間的偏差。它反映了系統(tǒng)在長(zhǎng)時(shí)間運(yùn)行過程中,對(duì)輸入信號(hào)的響應(yīng)能力。穩(wěn)態(tài)誤差的大小直接影響到系統(tǒng)的控制精度和性能。在實(shí)際應(yīng)用中,減小穩(wěn)態(tài)誤差是提高系統(tǒng)性能的關(guān)鍵。
- 減小系統(tǒng)穩(wěn)態(tài)誤差的控制策略
3.1 比例控制(P控制)
比例控制是一種基本的控制策略,通過比例系數(shù)將誤差信號(hào)放大,以減小穩(wěn)態(tài)誤差。P控制的傳遞函數(shù)為:
G_p(s) = K_p
其中,K_p為比例系數(shù),s為拉普拉斯變換中的復(fù)變量。
3.2 比例-積分控制(PI控制)
PI控制是P控制的擴(kuò)展,通過在P控制的基礎(chǔ)上增加積分環(huán)節(jié),可以進(jìn)一步減小穩(wěn)態(tài)誤差。PI控制的傳遞函數(shù)為:
G_pi(s) = K_p + K_i / s
其中,K_p為比例系數(shù),K_i為積分系數(shù)。
3.3 比例-積分-微分控制(PID控制)
PID控制是PI控制的進(jìn)一步擴(kuò)展,通過在PI控制的基礎(chǔ)上增加微分環(huán)節(jié),可以提高系統(tǒng)的響應(yīng)速度和抗干擾能力。PID控制的傳遞函數(shù)為:
G_pid(s) = K_p + K_i / s + K_d * s
其中,K_p為比例系數(shù),K_i為積分系數(shù),K_d為微分系數(shù)。
3.4 狀態(tài)反饋控制
狀態(tài)反饋控制是一種基于系統(tǒng)狀態(tài)的控制策略,通過設(shè)計(jì)狀態(tài)反饋矩陣,可以減小系統(tǒng)的穩(wěn)態(tài)誤差。狀態(tài)反饋控制的傳遞函數(shù)為:
G_fb(s) = -K * x(t)
其中,K為狀態(tài)反饋矩陣,x(t)為系統(tǒng)狀態(tài)向量。
3.5 非線性控制
非線性控制是一種針對(duì)非線性系統(tǒng)的控制策略,通過設(shè)計(jì)非線性控制器,可以減小系統(tǒng)的穩(wěn)態(tài)誤差。常見的非線性控制方法包括滑模控制、反推控制等。
3.6 魯棒控制
魯棒控制是一種在系統(tǒng)參數(shù)變化或存在不確定性時(shí),仍能保持控制性能的控制策略。通過設(shè)計(jì)魯棒控制器,可以減小系統(tǒng)的穩(wěn)態(tài)誤差。常見的魯棒控制方法包括H∞控制、μ綜合控制等。
3.7 自適應(yīng)控制
自適應(yīng)控制是一種能夠根據(jù)系統(tǒng)參數(shù)變化或外部干擾,自動(dòng)調(diào)整控制參數(shù)的控制策略。通過設(shè)計(jì)自適應(yīng)控制器,可以減小系統(tǒng)的穩(wěn)態(tài)誤差。常見的自適應(yīng)控制方法包括模型參考自適應(yīng)控制、自適應(yīng)PID控制等。
3.8 智能控制
智能控制是一種利用人工智能技術(shù),如神經(jīng)網(wǎng)絡(luò)、模糊邏輯等,實(shí)現(xiàn)對(duì)復(fù)雜系統(tǒng)的控制。通過設(shè)計(jì)智能控制器,可以減小系統(tǒng)的穩(wěn)態(tài)誤差。常見的智能控制方法包括神經(jīng)網(wǎng)絡(luò)控制、模糊控制等。
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6604瀏覽量
110576 -
PI控制
+關(guān)注
關(guān)注
0文章
18瀏覽量
12856 -
輸入信號(hào)
+關(guān)注
關(guān)注
0文章
455瀏覽量
12547 -
穩(wěn)態(tài)誤差
+關(guān)注
關(guān)注
0文章
8瀏覽量
2094
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
測(cè)量誤差的分類及減小方法
PID算法比例控制出現(xiàn)穩(wěn)態(tài)誤差
怎么減小相電流測(cè)量的誤差影響?
關(guān)于接觸動(dòng)態(tài)測(cè)溫中減小傳熱誤差方法的探討
控制系統(tǒng)的時(shí)域分析法--控制系統(tǒng)的穩(wěn)態(tài)誤差

控制系統(tǒng)的穩(wěn)態(tài)特性穩(wěn)態(tài)誤差分析詳細(xì)課件免費(fèi)下載
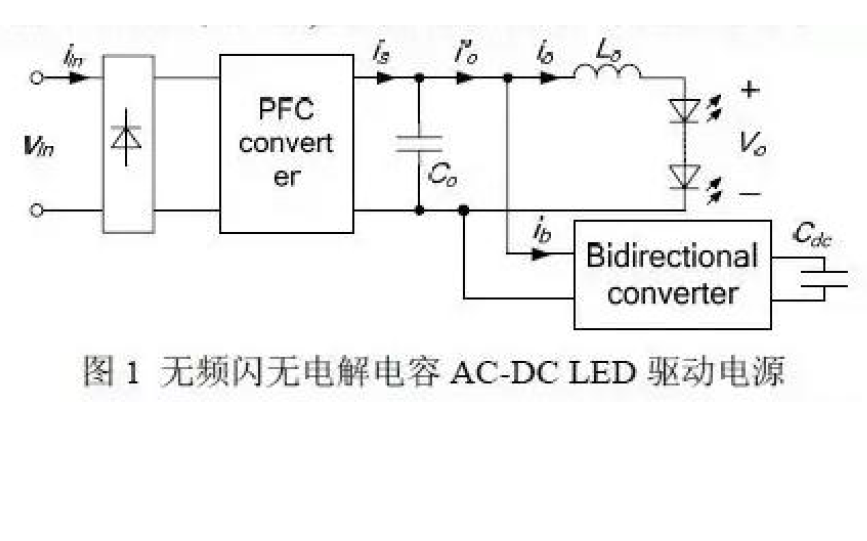
驅(qū)動(dòng)電源中應(yīng)該如何減小LED電流畸變的方法





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論