") 穩(wěn)態(tài)誤差反映了系統(tǒng)的什么性能
穩(wěn)態(tài)誤差反映了系統(tǒng)的什么性能
穩(wěn)態(tài)誤差是控制系統(tǒng)中一個重要的性能指標(biāo),它反映了系統(tǒng)在達(dá)到穩(wěn)態(tài)時,輸出與期望值之間的差異。在控制系統(tǒng)的設(shè)計和分析中,穩(wěn)態(tài)誤差的分析和計算對于提高系統(tǒng)性能具有重要意義。
一、穩(wěn)態(tài)誤差的概念
穩(wěn)態(tài)誤差是指在系統(tǒng)達(dá)到穩(wěn)態(tài)后,系統(tǒng)輸出與期望輸出之間的差值。在控制系統(tǒng)中,穩(wěn)態(tài)誤差是衡量系統(tǒng)性能的重要指標(biāo)之一。穩(wěn)態(tài)誤差的大小直接影響到系統(tǒng)的控制精度和穩(wěn)定性。
穩(wěn)態(tài)誤差通常用符號Es表示,其定義為:
[ E_s = r(t) - y(t) ]
其中,r(t)是系統(tǒng)的期望輸出,y(t)是系統(tǒng)的實際輸出。
二、穩(wěn)態(tài)誤差的計算方法
穩(wěn)態(tài)誤差的計算方法主要取決于系統(tǒng)的類型和控制策略。以下是幾種常見的穩(wěn)態(tài)誤差計算方法:
- 開環(huán)系統(tǒng) :在開環(huán)系統(tǒng)中,系統(tǒng)的輸出僅依賴于輸入,而不受反饋信號的影響。因此,穩(wěn)態(tài)誤差可以通過直接比較期望輸出和實際輸出來計算。
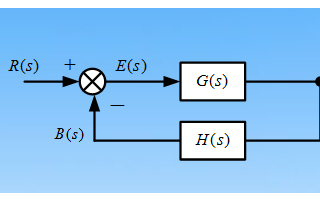
- 閉環(huán)系統(tǒng) :在閉環(huán)系統(tǒng)中,系統(tǒng)的輸出受到反饋信號的影響。穩(wěn)態(tài)誤差的計算需要考慮系統(tǒng)的動態(tài)特性和控制策略。常見的計算方法包括:
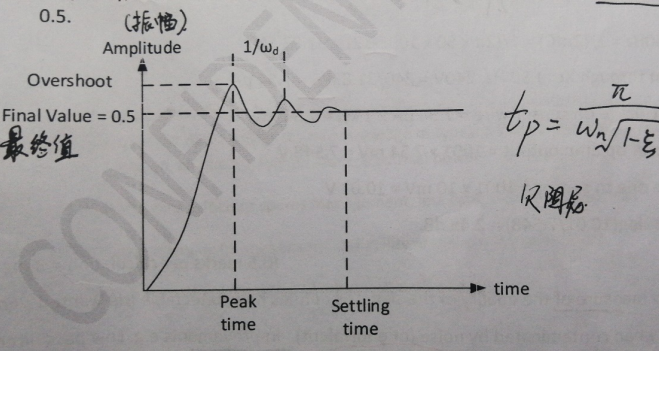
- 單位階躍響應(yīng)法 :在單位階躍輸入下,系統(tǒng)的穩(wěn)態(tài)誤差可以通過系統(tǒng)的穩(wěn)態(tài)增益來計算。
- 單位斜坡響應(yīng)法 :在單位斜坡輸入下,系統(tǒng)的穩(wěn)態(tài)誤差可以通過系統(tǒng)的穩(wěn)態(tài)誤差系數(shù)來計算。
- 單位加速度響應(yīng)法 :在單位加速度輸入下,系統(tǒng)的穩(wěn)態(tài)誤差可以通過系統(tǒng)的穩(wěn)態(tài)誤差系數(shù)和系統(tǒng)的動態(tài)特性來計算。
- 非線性系統(tǒng) :對于非線性系統(tǒng),穩(wěn)態(tài)誤差的計算需要考慮系統(tǒng)的非線性特性。常見的計算方法包括:
- 分段線性化法 :將非線性系統(tǒng)分段線性化,然后分別計算每一段的穩(wěn)態(tài)誤差。
- 近似計算法 :通過近似方法,如泰勒級數(shù)展開,來計算非線性系統(tǒng)的穩(wěn)態(tài)誤差。
三、穩(wěn)態(tài)誤差的影響因素
穩(wěn)態(tài)誤差的大小受到多種因素的影響,主要包括:
- 系統(tǒng)模型的準(zhǔn)確性 :系統(tǒng)模型的準(zhǔn)確性直接影響到穩(wěn)態(tài)誤差的計算。如果系統(tǒng)模型存在誤差,那么計算得到的穩(wěn)態(tài)誤差也會存在誤差。
- 控制策略的選擇 :不同的控制策略會導(dǎo)致不同的穩(wěn)態(tài)誤差。例如,PID控制、模糊控制、自適應(yīng)控制等控制策略在穩(wěn)態(tài)誤差方面的表現(xiàn)各不相同。
- 系統(tǒng)參數(shù)的變化 :系統(tǒng)參數(shù)的變化會影響系統(tǒng)的動態(tài)特性,從而影響穩(wěn)態(tài)誤差。例如,系統(tǒng)的增益、時間常數(shù)、阻尼比等參數(shù)的變化都會導(dǎo)致穩(wěn)態(tài)誤差的變化。
- 外部干擾 :外部干擾會影響系統(tǒng)的輸出,從而影響穩(wěn)態(tài)誤差。例如,溫度變化、電源波動等外部干擾都可能導(dǎo)致穩(wěn)態(tài)誤差的增加。
- 測量誤差 :測量誤差會導(dǎo)致實際輸出與期望輸出之間的差異,從而影響穩(wěn)態(tài)誤差。例如,傳感器的精度、噪聲等都會影響測量誤差。
四、減小穩(wěn)態(tài)誤差的方法
減小穩(wěn)態(tài)誤差是控制系統(tǒng)設(shè)計的重要目標(biāo)之一。以下是一些常見的減小穩(wěn)態(tài)誤差的方法:
- 提高系統(tǒng)模型的準(zhǔn)確性 :通過精確建模和參數(shù)估計,可以提高系統(tǒng)模型的準(zhǔn)確性,從而減小穩(wěn)態(tài)誤差。
- 選擇合適的控制策略 :根據(jù)系統(tǒng)的特點和控制要求,選擇合適的控制策略。例如,對于要求高精度的系統(tǒng),可以選擇PID控制;對于非線性系統(tǒng),可以選擇模糊控制或自適應(yīng)控制。
- 優(yōu)化系統(tǒng)參數(shù) :通過參數(shù)優(yōu)化,可以改善系統(tǒng)的動態(tài)特性,從而減小穩(wěn)態(tài)誤差。例如,可以通過調(diào)整系統(tǒng)的增益、時間常數(shù)、阻尼比等參數(shù),來減小穩(wěn)態(tài)誤差。
- 提高系統(tǒng)的抗干擾能力 :通過設(shè)計魯棒控制器或采用濾波器等方法,可以提高系統(tǒng)的抗干擾能力,從而減小穩(wěn)態(tài)誤差。
- 提高測量精度 :通過選擇高精度的傳感器或采用誤差補(bǔ)償技術(shù),可以提高測量精度,從而減小穩(wěn)態(tài)誤差。
- 采用前饋控制 :前饋控制可以預(yù)測系統(tǒng)的未來行為,從而提前調(diào)整控制輸入,減小穩(wěn)態(tài)誤差。
- 采用非線性控制 :對于非線性系統(tǒng),可以采用非線性控制策略,如非線性PID控制、滑模控制等,來減小穩(wěn)態(tài)誤差。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6604瀏覽量
110576 -
模型
+關(guān)注
關(guān)注
1文章
3226瀏覽量
48809 -
反饋信號
+關(guān)注
關(guān)注
0文章
31瀏覽量
8218 -
穩(wěn)態(tài)誤差
+關(guān)注
關(guān)注
0文章
8瀏覽量
2094
發(fā)布評論請先 登錄
相關(guān)推薦
【純菜鳥】PID算法穩(wěn)態(tài)誤差過大P
從別的專業(yè)轉(zhuǎn)到控制領(lǐng)域的,自動控制的知識尚不是很扎實,求解答用PID算法,設(shè)定值是一個方波,0的部分穩(wěn)態(tài)誤差很大(穩(wěn)態(tài)值是0.3左右)請問是參數(shù)設(shè)置的問題還是本身程序?qū)戝e了?求解答
發(fā)表于 02-19 02:12
系統(tǒng)時間響應(yīng)的性能指標(biāo)
用動態(tài)性能描述。(2)穩(wěn)態(tài)過程穩(wěn)態(tài)過程指系統(tǒng)在典型輸入信號作用下,當(dāng)時間t趨于無窮時,系統(tǒng)輸出量的表現(xiàn)方式。
發(fā)表于 10-12 09:49
PID算法比例控制出現(xiàn)穩(wěn)態(tài)誤差
學(xué)習(xí)PID過程中對只有P控制會出現(xiàn)穩(wěn)態(tài)誤差這個問題很疑惑,但是在網(wǎng)上沒有找到關(guān)于穩(wěn)態(tài)誤差的解釋,只是說了有穩(wěn)態(tài)
發(fā)表于 05-15 05:51
預(yù)均衡OFDM系統(tǒng)中定時誤差的性能影響
仿真研究了整數(shù)倍和分?jǐn)?shù)倍定時誤差對于預(yù)均衡OFDM系統(tǒng)的性能影響,結(jié)果表明:定時誤差將造成解調(diào)數(shù)據(jù)的相位旋轉(zhuǎn), 并導(dǎo)致預(yù)均衡
發(fā)表于 02-28 16:38
?19次下載
控制系統(tǒng)的時域分析法--控制系統(tǒng)的穩(wěn)態(tài)誤差
控制系統(tǒng)的時域分析法--控制系統(tǒng)的穩(wěn)態(tài)誤差
發(fā)表于 07-27 14:18
?3102次閱讀

控制系統(tǒng)的穩(wěn)態(tài)特性穩(wěn)態(tài)誤差分析詳細(xì)課件免費下載
本文檔的主要內(nèi)容詳細(xì)介紹的是控制系統(tǒng)的穩(wěn)態(tài)特性穩(wěn)態(tài)誤差分析詳細(xì)課件免費下載。
發(fā)表于 11-22 08:00
?7次下載
單穩(wěn)態(tài)觸發(fā)器暫穩(wěn)態(tài)持續(xù)時間誤差產(chǎn)生的原因是什么
觸發(fā)器的暫態(tài)持續(xù)時間是指從觸發(fā)器進(jìn)入暫態(tài)狀態(tài)開始到恢復(fù)到穩(wěn)態(tài)所經(jīng)過的時間。 然而,單穩(wěn)態(tài)觸發(fā)器的暫穩(wěn)態(tài)持續(xù)時間往往會存在誤差。這個誤差一般由
減小系統(tǒng)穩(wěn)態(tài)誤差的方法有哪些?
。它反映了系統(tǒng)在長時間運行過程中,對輸入信號的響應(yīng)能力。穩(wěn)態(tài)誤差的大小直接影響到系統(tǒng)的控制精度和
減小系統(tǒng)穩(wěn)態(tài)誤差可采用什么環(huán)節(jié)
減小系統(tǒng)穩(wěn)態(tài)誤差是控制系統(tǒng)設(shè)計中的一個重要目標(biāo),它關(guān)系到系統(tǒng)的精度和性能。本文將介紹減小
怎樣減小或消除擾動產(chǎn)生的穩(wěn)態(tài)誤差
減小或消除擾動產(chǎn)生的穩(wěn)態(tài)誤差是控制系統(tǒng)設(shè)計中的一個重要問題。 擾動的來源和分類 在控制系統(tǒng)中,擾動是指對系統(tǒng)性能產(chǎn)生影響的外部或內(nèi)部因素。根
改善系統(tǒng)穩(wěn)態(tài)精度的途徑有哪些
引言 系統(tǒng)穩(wěn)態(tài)精度是指系統(tǒng)在穩(wěn)定狀態(tài)下的輸出精度,是衡量系統(tǒng)性能的重要指標(biāo)之一。隨著科技的不斷發(fā)展,系統(tǒng)
如何降低輸入引起的穩(wěn)態(tài)誤差
引言 穩(wěn)態(tài)誤差是指在給定輸入信號作用下,系統(tǒng)輸出與期望輸出之間的差異。在控制系統(tǒng)中,穩(wěn)態(tài)誤差的存





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論