 閉環增益首一型和尾一型的特點
閉環增益首一型和尾一型的特點
閉環增益是控制系統中的一個重要概念,它描述了系統在閉環工作狀態下的放大倍數。閉環增益的類型主要有兩種:首一型和尾一型。這兩種類型的閉環增益在控制系統的設計和分析中具有不同的應用和特點。
一、閉環增益的基本概念
1.1 閉環控制系統
閉環控制系統是一種反饋控制系統,它通過測量系統的輸出信號并與期望的輸入信號進行比較,得到誤差信號。然后將誤差信號輸入到控制器中,控制器根據誤差信號產生控制信號,進而控制執行器對系統進行調節,使系統的輸出信號盡可能接近期望的輸入信號。
1.2 閉環增益的定義
閉環增益是指在閉環控制系統中,輸入信號與輸出信號之間的比值。它反映了系統對輸入信號的放大能力。閉環增益的計算公式為:
閉環增益 = 系統輸出 / 系統輸入
1.3 閉環增益的類型
閉環增益的類型主要有兩種:首一型和尾一型。首一型閉環增益是指在控制系統的開環傳遞函數中,分子的最高次項為1,而分母的最高次項不為1的閉環增益。尾一型閉環增益是指在控制系統的開環傳遞函數中,分母的最高次項為1,而分子的最高次項不為1的閉環增益。
二、首一型閉環增益
2.1 首一型閉環增益的特點
首一型閉環增益具有以下特點:
- 系統穩定性好:由于首一型閉環增益的分子最高次項為1,因此在控制系統的開環傳遞函數中,分子的階數高于分母的階數,這有助于提高系統的穩定性。
- 快速響應:首一型閉環增益的分子階數較高,使得系統在輸入信號變化時,輸出信號能夠快速跟隨輸入信號,具有較好的動態性能。
- 抗干擾能力較強:由于首一型閉環增益的分子階數較高,系統對外部干擾的抑制能力較強,能夠減小干擾對系統性能的影響。
2.2 首一型閉環增益的計算方法
首一型閉環增益的計算方法如下:
- 確定系統的開環傳遞函數:首先需要確定控制系統的開環傳遞函數,通常表示為G(s)。
- 計算閉環傳遞函數:根據閉環控制系統的基本原理,閉環傳遞函數可以表示為T(s) = G(s) / (1 + G(s)H(s)),其中H(s)為反饋環節的傳遞函數。
- 計算閉環增益:將閉環傳遞函數T(s)代入閉環增益的計算公式,即可得到首一型閉環增益。
2.3 首一型閉環增益的應用
首一型閉環增益在實際應用中具有廣泛的應用,例如在工業自動化、航空航天、機器人技術等領域。首一型閉環增益能夠提供較好的穩定性和動態性能,因此在需要快速響應和抗干擾能力較強的場合,首一型閉環增益是一個較好的選擇。
三、尾一型閉環增益
3.1 尾一型閉環增益的特點
尾一型閉環增益具有以下特點:
- 系統穩定性較差:由于尾一型閉環增益的分母最高次項為1,因此在控制系統的開環傳遞函數中,分母的階數高于分子的階數,這可能導致系統的穩定性較差。
- 響應速度較慢:尾一型閉環增益的分母階數較高,使得系統在輸入信號變化時,輸出信號的響應速度較慢,動態性能較差。
- 抗干擾能力較弱:由于尾一型閉環增益的分母階數較高,系統對外部干擾的抑制能力較弱,容易受到干擾的影響。
3.2 尾一型閉環增益的計算方法
尾一型閉環增益的計算方法與首一型閉環增益類似,主要包括確定系統的開環傳遞函數、計算閉環傳遞函數和計算閉環增益三個步驟。
3.3 尾一型閉環增益的應用
尾一型閉環增益在實際應用中相對較少,但在某些特定場合,例如需要降低系統響應速度以減少能耗或減小機械磨損的場合,尾一型閉環增益可能會被選用。
-
控制系統
+關注
關注
41文章
6604瀏覽量
110576 -
測量系統
+關注
關注
2文章
537瀏覽量
41386 -
輸出信號
+關注
關注
0文章
281瀏覽量
11858 -
閉環增益
+關注
關注
0文章
13瀏覽量
1971
發布評論請先 登錄
相關推薦
運放的閉環增益問題
[經驗] 運放閉環學習筆記:第一講:運放開環缺點及閉環優點
淺析主通路和反饋通路的開環增益與閉環增益
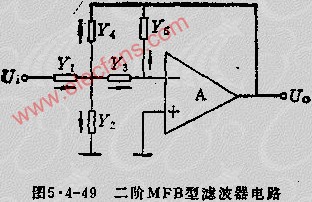
無限增益多端反饋型濾波器





 工商網監
工商網監
評論