 基于NSUC1610的步進電機控制原理及其實際應用
基于NSUC1610的步進電機控制原理及其實際應用
納芯微推出“Cube N課堂”系列,該系列聚焦納芯微的嵌入式電機驅動SoC 產品系列。探索其多元應用,與大家共同玩轉奇妙的“產品魔方”。
本期內容
隨著現代汽車電子技術的快速發展,步進電機作為一種精確且可靠的執行元件,在汽車電子系統中的應用日益廣泛。為了實現車載步進電機應用的精確控制,納芯微推出了集成LIN和MOSFET功率級的單芯片車用小電機驅動SoC——NSUC1610,可以幫助客戶實現安全可靠的車載電機控制。
本文將結合步進電機的結構與驅動方法,重點介紹基于NSUC1610的步進電機控制原理及其實際應用,并為大家提供了相應的demo演示。
文末更有精彩互動有獎,等待大家參與領取歐~
請觀看視頻↓
以下是為大家準備的詳細的文字解讀~
步進電機結構及其驅動方法
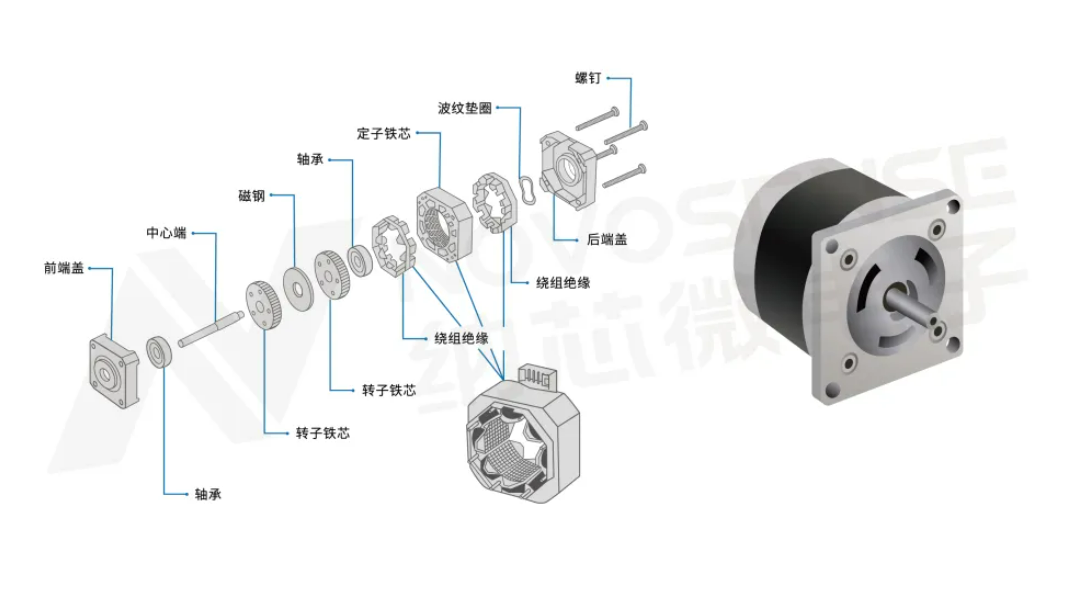
與人們熟知的大部分電機一樣,步進電機的結構也是由定子和轉子組成。轉子由軸承、鐵芯、磁鋼等構成。轉子鐵芯帶有齒輪,是步進電機單部步距的行程;定子是由鐵芯、定子繞組和支撐結構構成。
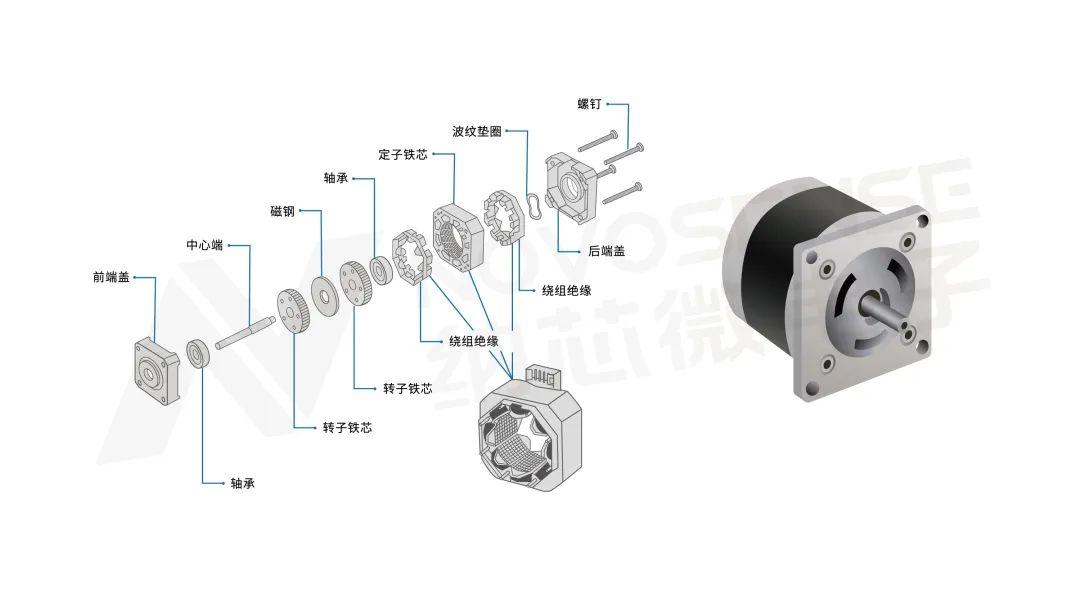
步進電機結構
根據繞組方式,步進電機主要分為兩大類:一類是單極性步進電機,它是由帶中心抽頭(公共線)的單繞組組成,其電流均由1、2、3、4四根線的相線流入中心抽頭公共線,因此電流方向是單向的。另一類是雙極性步進電機,由沒有中心抽頭的繞組構成,其電流方向是雙向的。
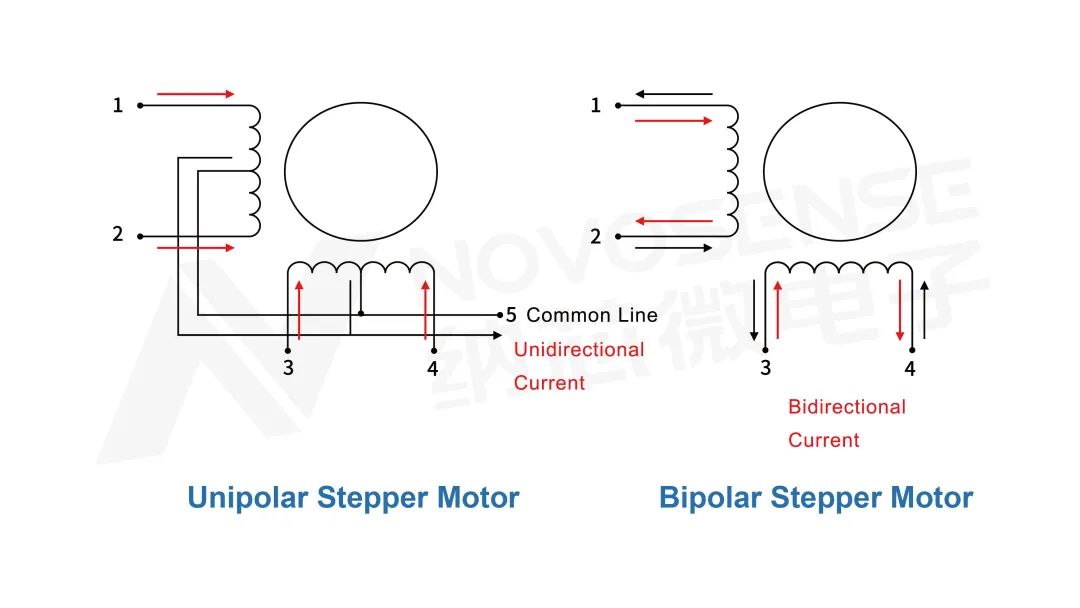
步進電機的分類
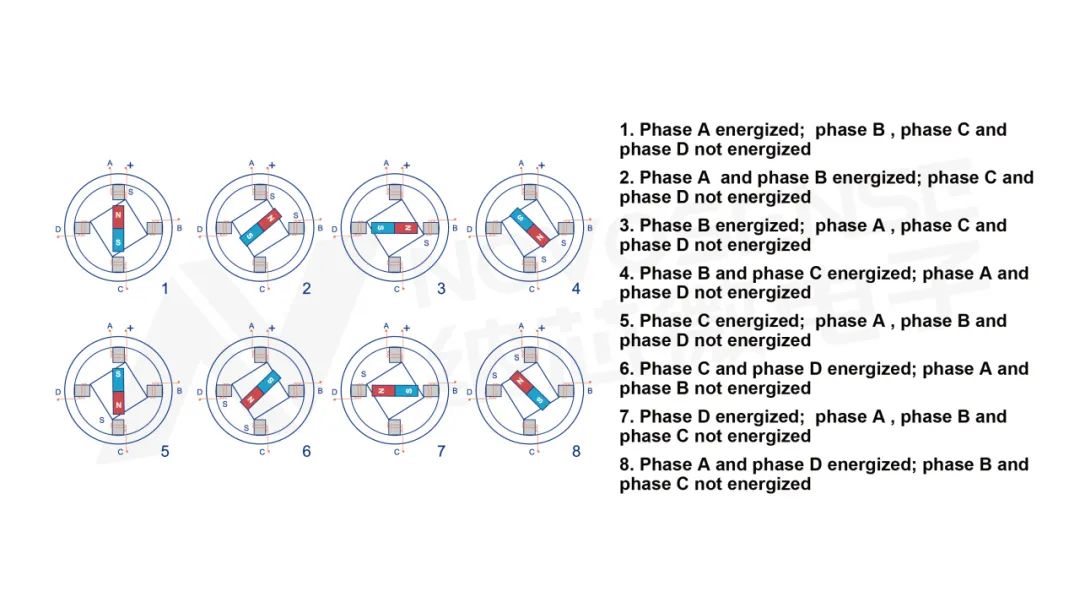
單極性步進全步運轉示意圖
單極性步進電機和雙極性步進電機的驅動方式不盡相同,上圖中單極性步進電機的A、B、C、D分別是兩相四線,5為抽頭的公共線。在驅動電機全步運行時,步驟如下
1
第一步
A相通電,B、C、D相不通電,A相產生磁場,且磁極是S極,吸引轉子的N極;
2
第二步
A、B相全部通電且電流相同,產生相同的磁極,兩個S極磁場矢量合成,吸引轉子向A、B相之間旋轉;
3
第三步
B相通電,A相斷電,B相產生磁場,且磁極是S極,吸引轉子的N極;
4
第四步
B、C相通電且電流相等產生相同的磁性,兩個S極磁場矢量合成,即可吸引轉子向BC相之間旋轉。
依次類推五六七八步,使整個步進電機旋轉起來。
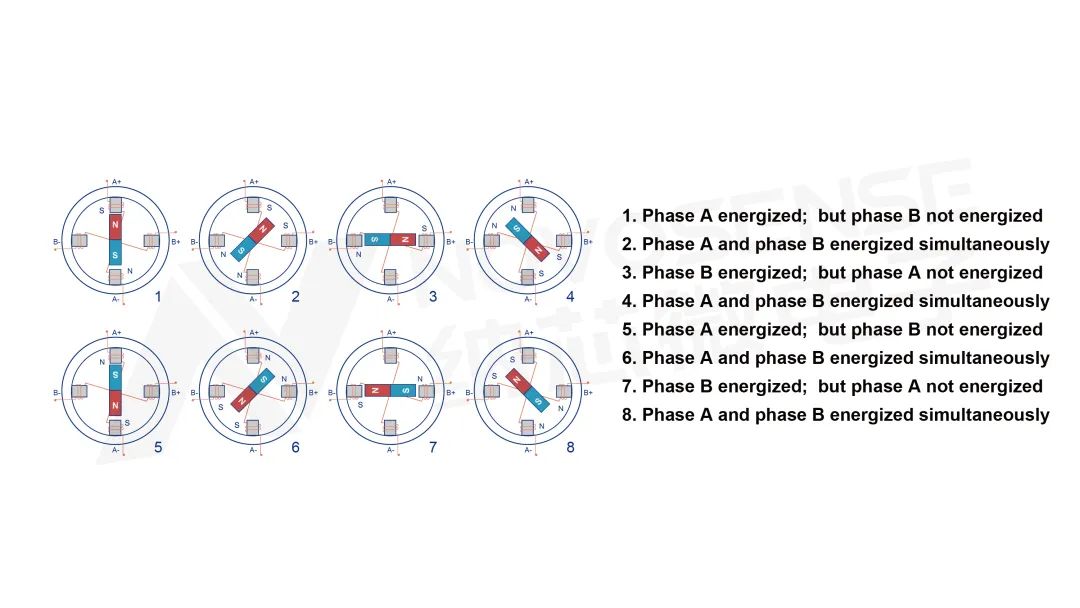
雙極性步進全步運轉示意圖
雙極性步進電機的驅動是直接驅動A+、A-、B+、B-兩相四根線來實現運轉的。步驟如下
1
第一步
A相通電,B相不通電,A相產生磁場且A+磁極是S極,A-磁極是N極,吸引轉子的N極至A+,S極至A-;
2
第二步
A、B相全部通電且電流相同,產生相同的磁極,兩個S極的N極磁場矢量合成,吸引轉子N極向A+、B+相之間旋轉;
3
第三步
B相通電,A相斷電,B相產生磁場且磁極是S極,吸引轉子的N極至B+;
3
第四步
B相通電,A相斷電且電流相等,產生相同磁性,兩個S極磁場矢量合成,吸引轉子N極,向B+、A-相之間旋轉。
依此類推五六七八步,整個步進電機便旋轉起來。
基于NSUC1610的步進電機控制
納芯微NSUC1610采用數字恒流控制技術,由PWM 100%控制每個周期的電流輸出,實現對輸出電流的精確調節。這意味著,在輸出電流未達到設定電流值之前,PWM輸出on,一旦達到設定電流值便輸出off;如果在輸出off之后的輸出電流低于設定值,就會在下一個周期重新輸出高電平,繼續增加輸出電流,以便在PWM輸出off時使電流及時衰減至設定值。
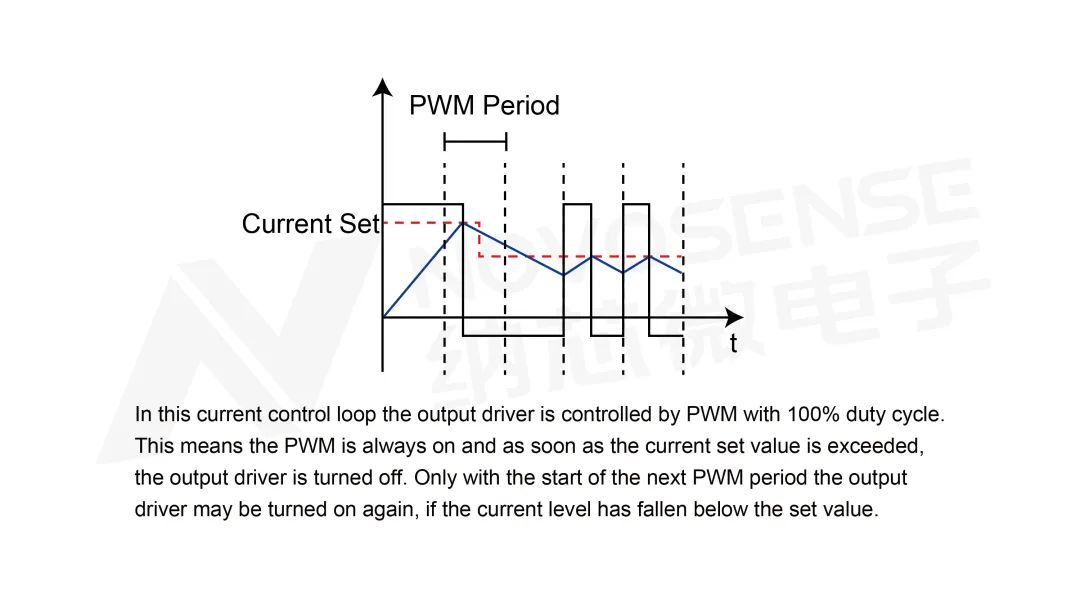
硬件電流控制
NSUC1610的電流控制采用三種衰減方式,以適應不同類型和需求的步進電機。第一種是慢衰減(slow decay)方式,打開電流輸出時,上橋臂輸出PWM波,下橋臂輸出常高;關閉電流時,關閉上橋臂,下橋臂保持常高,通過MOSFET的體二極管實現泄放。這種方式是將電流的電能轉化為熱能,但泄放能力有限。
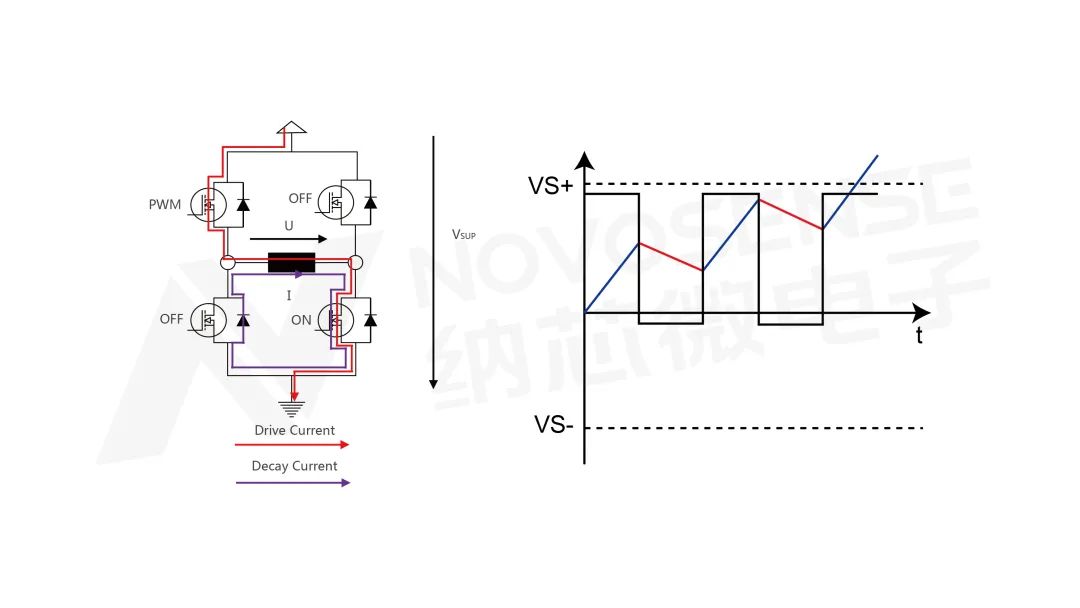
異步慢衰減
第二種是快衰減(fast decay)方式,打開電流輸出時,上下橋臂均輸出PWM波;關閉電流輸出時,通過打開反向的上下橋臂,直接將能量泄放至電源充電,此時泄放能力較大。
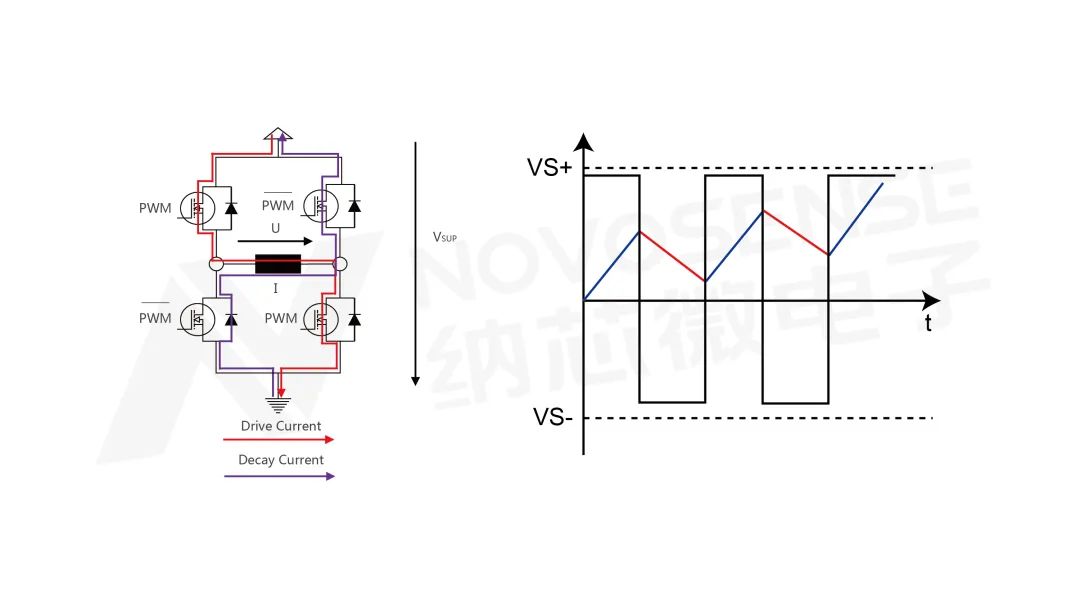
同步快速衰減
第三種是混合衰減(mix decay)方式,它結合了前兩種方式,一段時間采用慢衰減方式,一段時間采用快衰減方式,并調控兩者的時間比例。
至于具體采用哪一種衰減方式來衰減電流,需要根據電機的電感參數及電機的轉速等合理選擇。
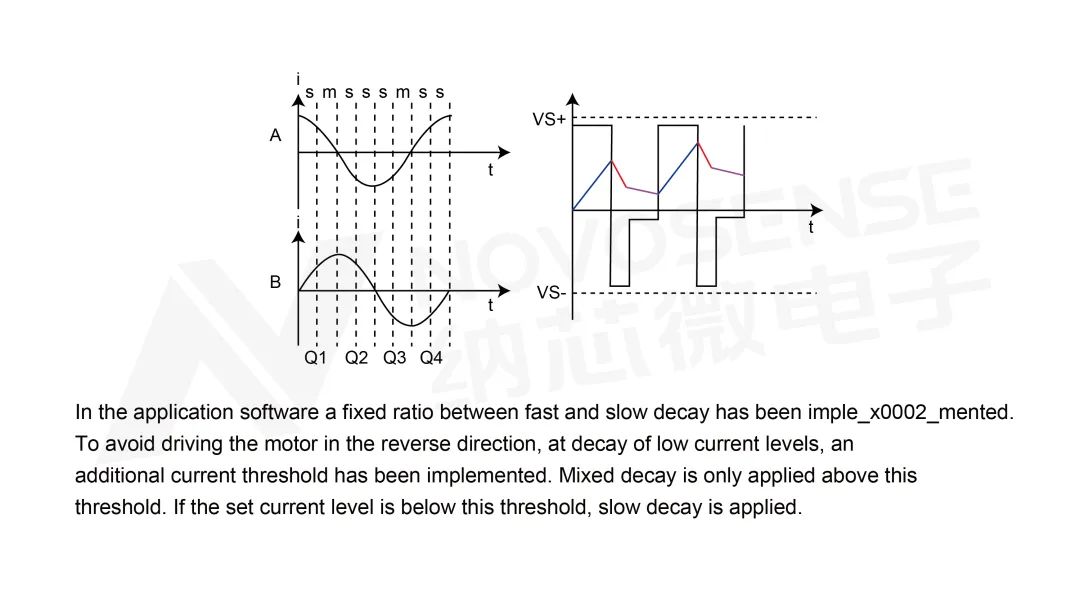
混合衰減
在采用NSUC1610驅動雙極性步進電機時,只需將電機的A+、A-、B+、B-四根線直接與MOUT0、MOUT1、MOUT2、MOUT3相連,VSS、ISNS管腳直接接地,外圍電路只需加一些必要的電容、電阻及二極管等被動元件,即可實現用單芯片控制雙極性步進電機,同時還可以實現與LIN主機的通信,大大地提高系統的集成度和可靠性。
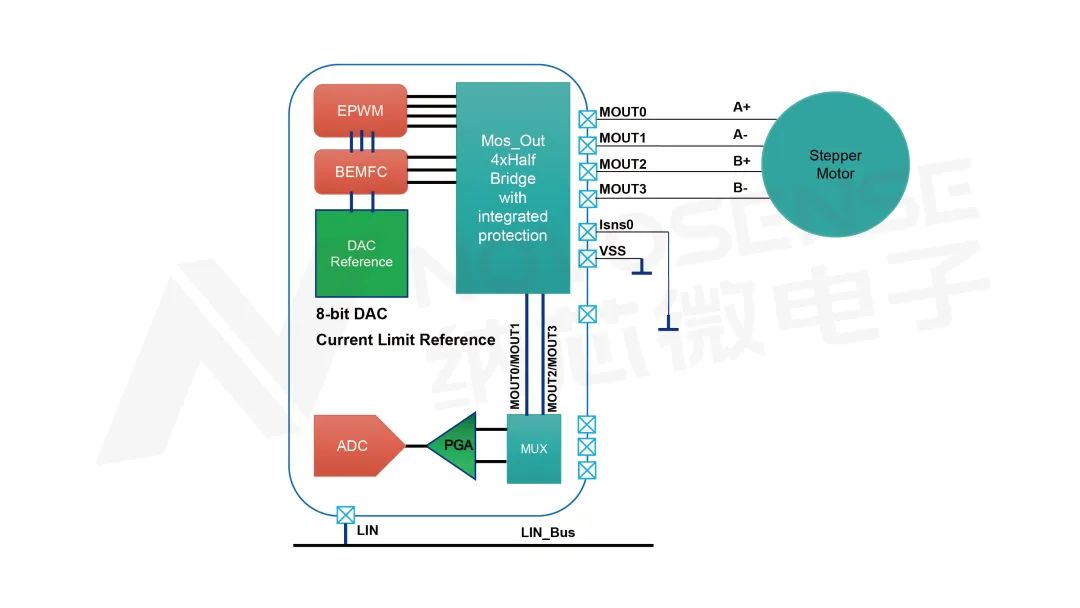
基于NSUC1610的步進電機圖
從步進電機的驅動原理來看,通過給電機的兩相通上交流電流即可使電機旋轉。實際上,這是比較粗糙的步進電機控制方式,這種控制方式產生的電流突變點較多,轉距不恒定,旋轉也就不太平順。
為了讓電機較為平順絲滑地旋轉,通常采用微步驅動方式。微步驅動方式不同于全步驅動方式,它是在8步全步中去掉了4步,插入了中間點臨界電流,即0電流。通過不斷類推,不斷插入中間電流,即可減小電流突變,細化電機的電流變化,使之接近正弦,從而實現微步。微步的目標是產生A、B相位差90°的正弦電流。
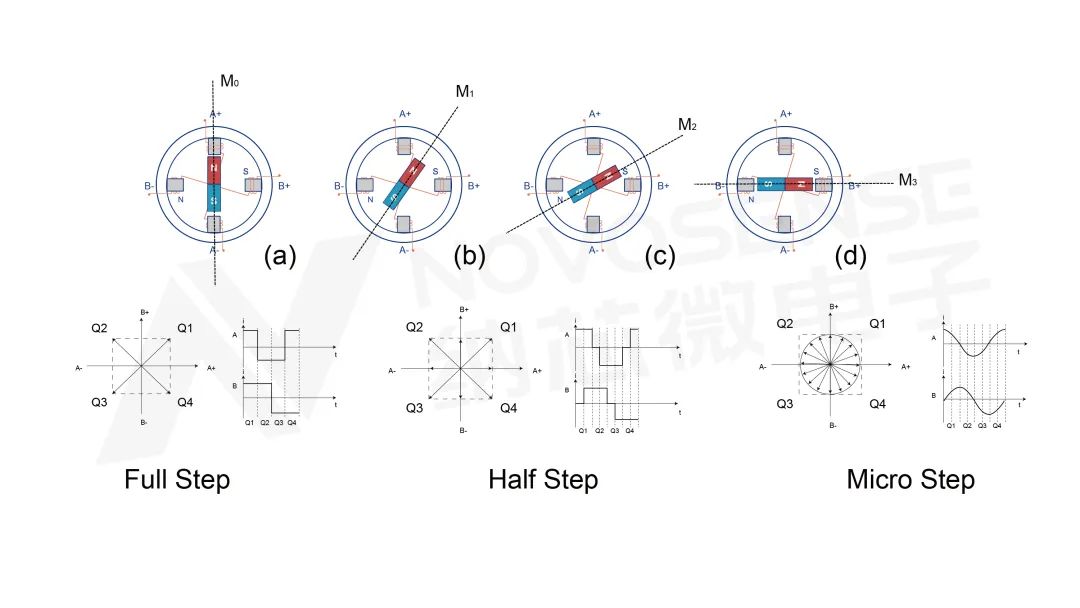
微步原理
NSUC1610利用數字恒流控制實現了微步正弦電流控制,具體實現原理是采用比較器恒流控制。方法是在正端接入一個橋臂電流采樣信號,負端接入一個DAC輸出電壓信號,在每一個微步控制期間觸發固定的DAC輸出。
如果橋臂電流信號大于DAC,則打開相應的橋臂輸出;如果橋臂電流小于DAC值,則關閉相應的橋臂輸出,這樣即可實現每一個微步期間的閉環恒流控制。在整個步進區間中,根據正弦公式改變DAC輸出,即可實現電流信號的正弦輸出,從而實現步進電機的微步控制。
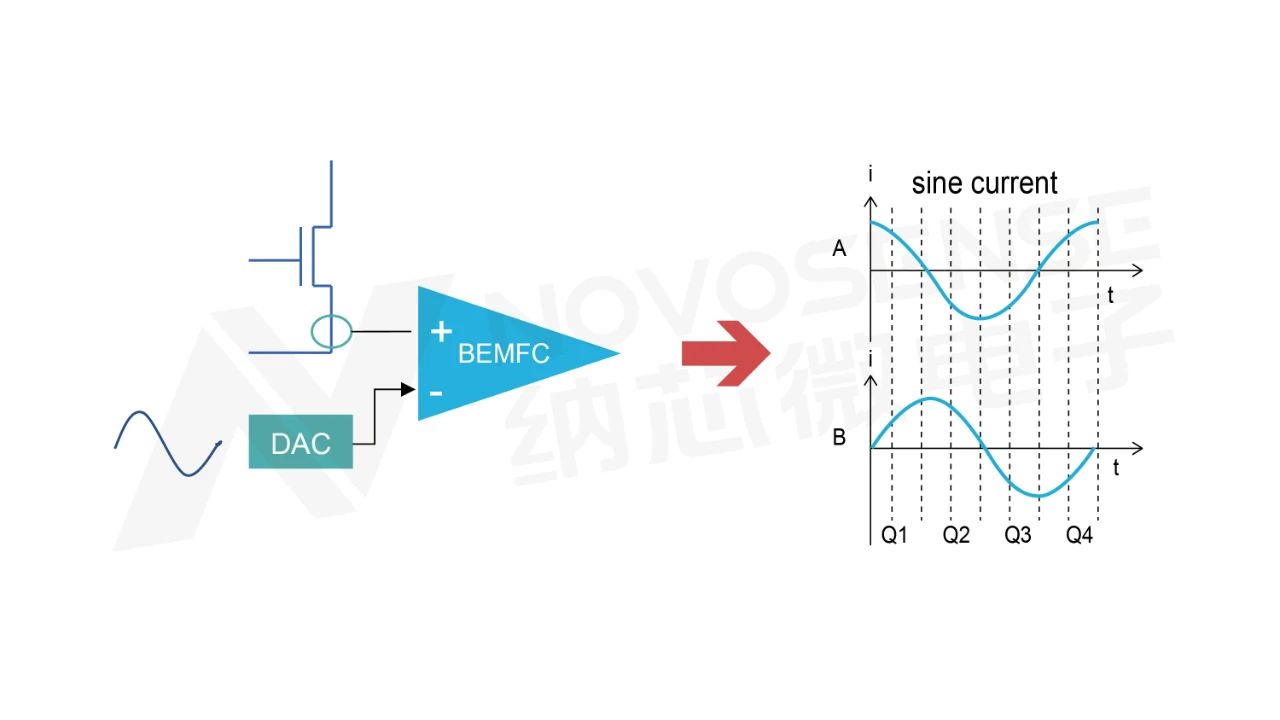
步進電機微步電流控制
在電機旋轉過程中,會出現一定概率的堵轉而導致電機失步。為了檢測電機是否出現堵轉失步,可以通過測量電機的反電動勢來判定。由于電機的反電動勢與其轉速成正比,因此需要為測量到的反電動勢設定一個合理的閾值,小于設定閾值即可認為電機出現了失步。
在整個電流控制區間,電機的反電動勢大部分是不可測量的。只有當電流為0,橋臂沒有導通驅動電機時,測量的兩個橋臂電壓才是真實反電動勢。
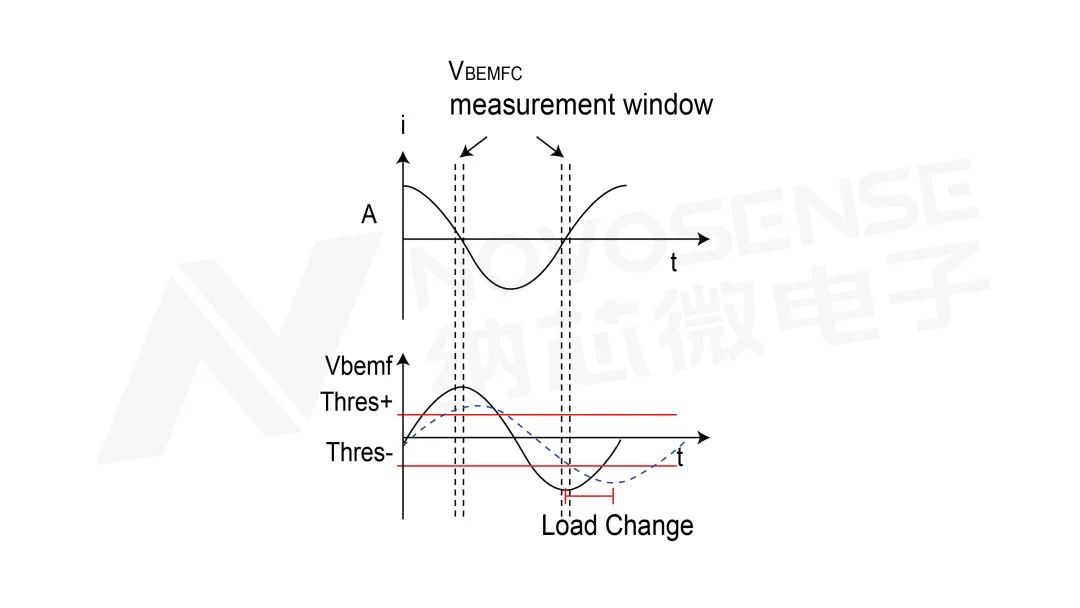
步進電機失速檢測
電機的啟動和停止時速度為0,如果直接滿速啟動或停止,那么電機的啟停就會很突然,出現不平順。為了實現較為平緩的速度控制,可以采用梯形加減速的方式實現位置控制。由于速度控制的曲線是梯形,位移曲線就是S型。從圖中可以看到,電流波形在加速減速階段較為稀疏,而在勻速階段較為密集。一般步進電機停止前,會有一段大的穩定電流,旨在防止電機轉到目標位置時出現過沖;接著進入hold狀態,利用一個小的hold電流可使扭矩保持不變。
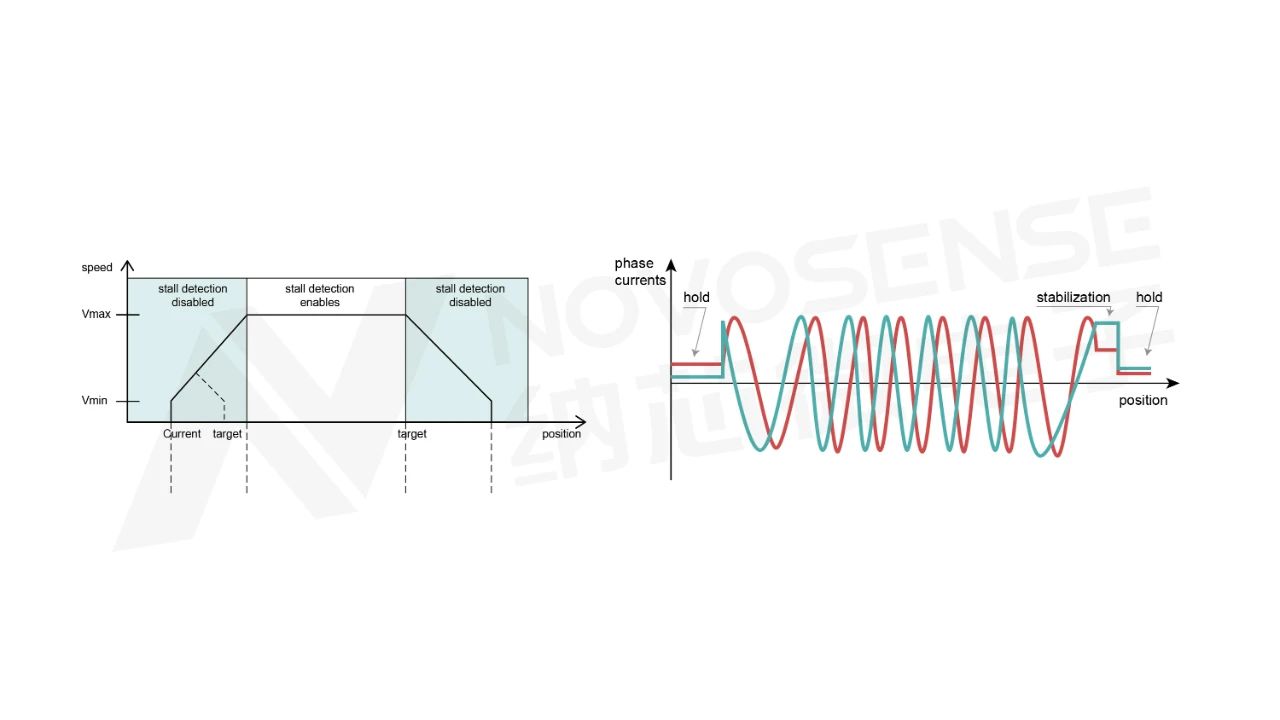
步進電機位置控制
更高效智能的車載步進電機控制
通過采用數字恒流控制技術,NSUC1610實現了對步進電機電流的精確調節,以適應不同類型和需求的步進電機。NSUC1610還支持微步驅動方式,使步進電機的旋轉更加平順絲滑。
-
電機控制
+關注
關注
3534文章
1876瀏覽量
268738 -
soc
+關注
關注
38文章
4161瀏覽量
218160 -
步進電機
+關注
關注
150文章
3109瀏覽量
147443 -
納芯微
+關注
關注
2文章
242瀏覽量
14500
原文標題:Cube N課堂 | 納芯微高集成單芯片SoC如何高效智能控制車載步進電機?
文章出處:【微信號:納芯微電子,微信公眾號:納芯微電子】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
AMEYA360:納芯微高集成單芯片SoC如何高效智能控制車載步進電機?
納芯微電子高集成度嵌入式電機控制IC NSUC1602輕松應對大電流挑戰
國內首發納芯微車用小電機驅動SoC——NSUC1610

納芯微車用小電機驅動SoC——NSUC1610
Cube N課堂 | 嵌入式電機驅動SoC NSUC1610的座椅通風應用解析







 工商網監
工商網監
評論