 驅動LSM6DS3TR-C實現高效運動檢測與數據采集(9)----獲取磁力計數據
驅動LSM6DS3TR-C實現高效運動檢測與數據采集(9)----獲取磁力計數據
概述
本文將介紹如何使用 LIS2MDL 傳感器來主要步驟包括初始化傳感器接口、驗證設備ID、配置傳感器的數據輸出率和濾波器,以及通過輪詢方式持續讀取磁力數據和溫度數據。讀取到的數據會被轉換為適當的單位并通過串行通信輸出。
需要樣片的可以加群申請:615061293 。

視頻教學
[https://www.bilibili.com/video/BV17x4y147Kc/]
樣品申請
[https://www.wjx.top/vm/OhcKxJk.aspx#]
源碼下載
[https://download.csdn.net/download/qq_24312945/89562797]
九軸融合
在六軸基礎上添加磁力計執行九軸融合 ,MotionFX庫實現了一種傳感器融合算法,用于估計空間中的3D方向。它使用基于卡爾曼濾波器的數字濾波器理論來融合來自多個傳感器的數據,并補償單個傳感器的局限性。例如:
● 陀螺儀數據可能會漂移,這會影響方向估計;使用磁力計可以提供絕對方向信息來解決這個問題。
● 磁力計帶寬不高且易受磁干擾影響,但這些弱點可以通過陀螺儀補償。
● 九軸傳感器融合使用加速度計、陀螺儀和磁力計的數據,提供包括航向(即磁北方向)的絕對方向。
● 六軸傳感器融合僅使用加速度計和陀螺儀數據,計算量較小,但不提供絕對方向信息。
● 六軸傳感器融合適用于快速移動的場景(如游戲)和不需要絕對方向的情況。

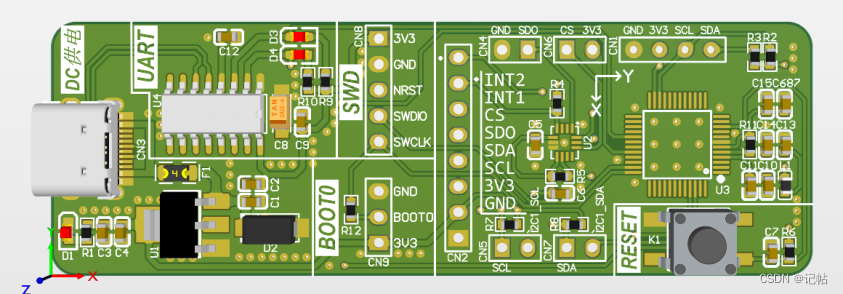
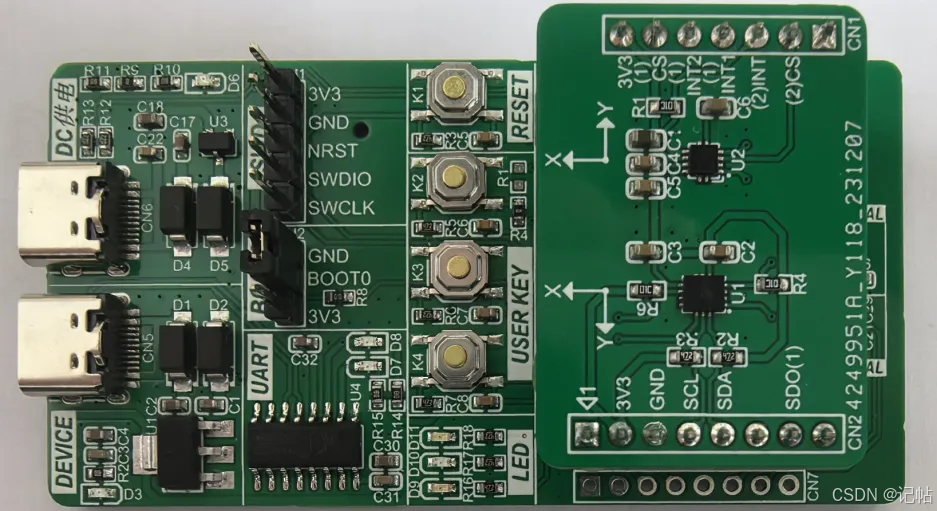
通信模式
對于LIS2MDL,可以使用SPI或者IIC進行通訊。 最小系統圖如下所示。
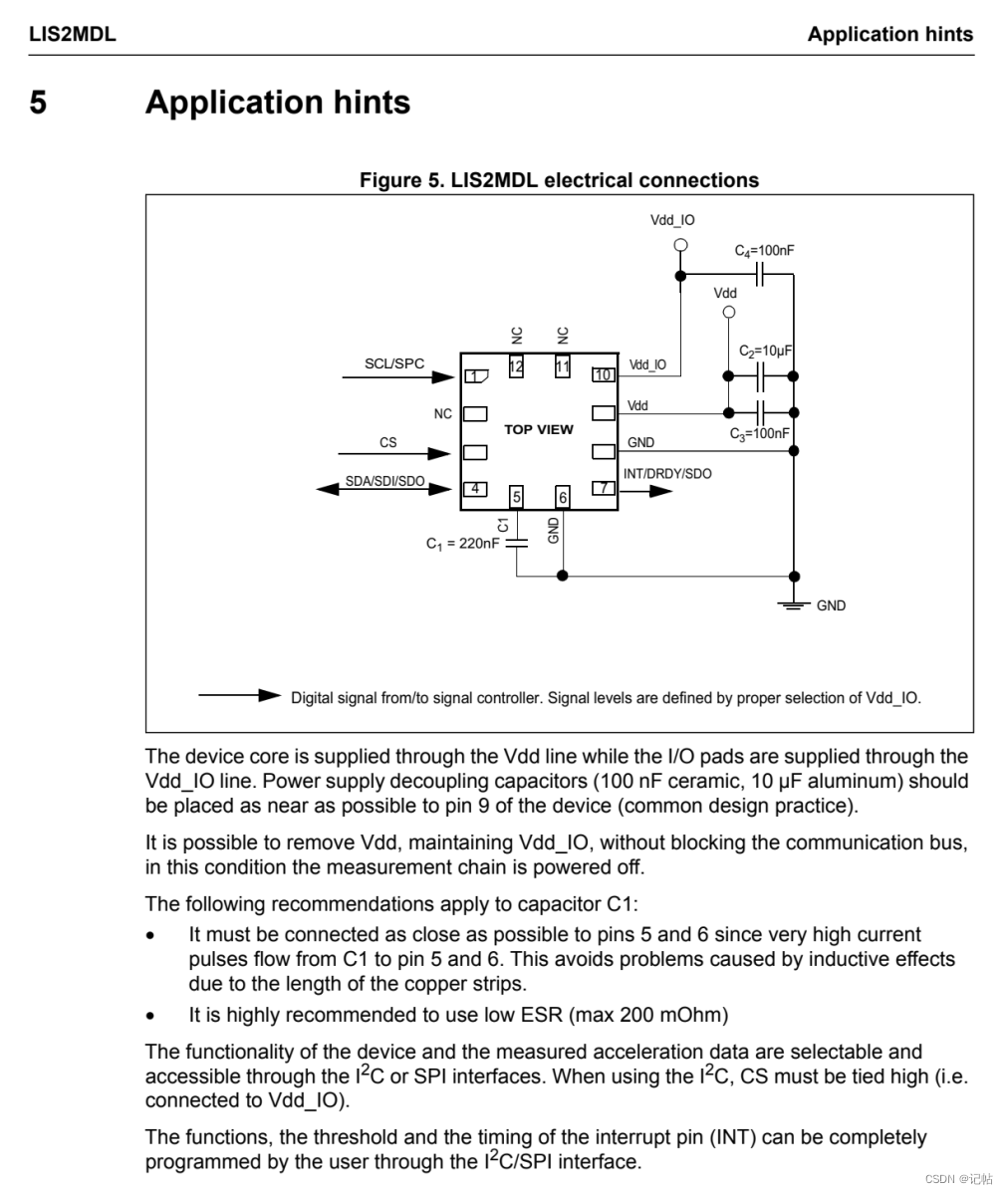
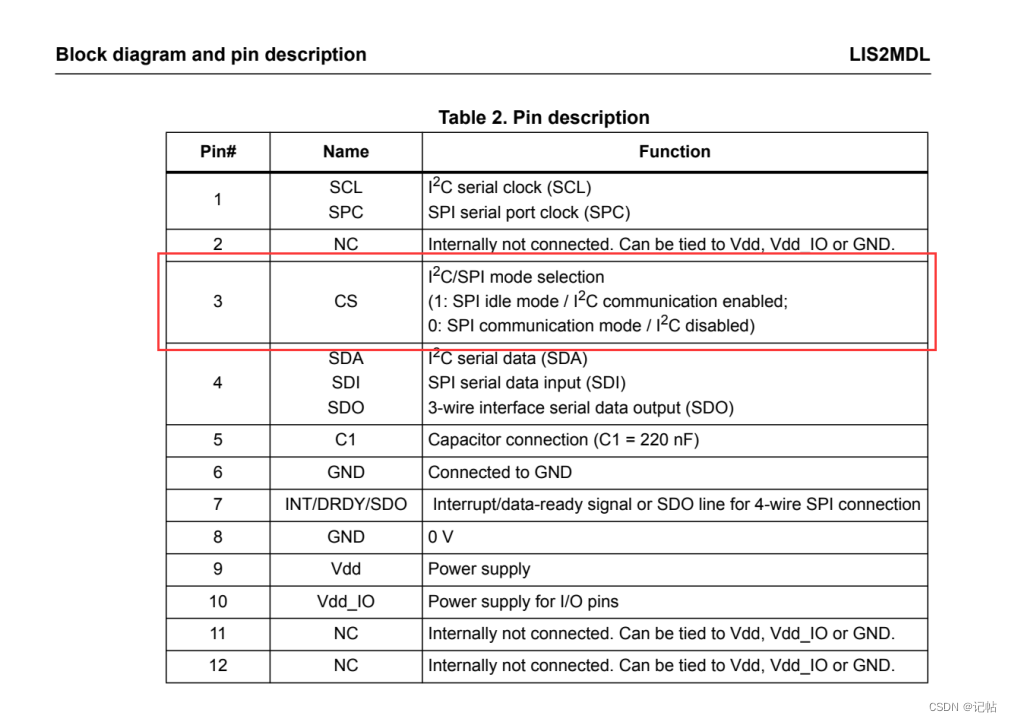
在CS管腳為1的時候,為IIC模式
本文使用的板子原理圖如下所示。

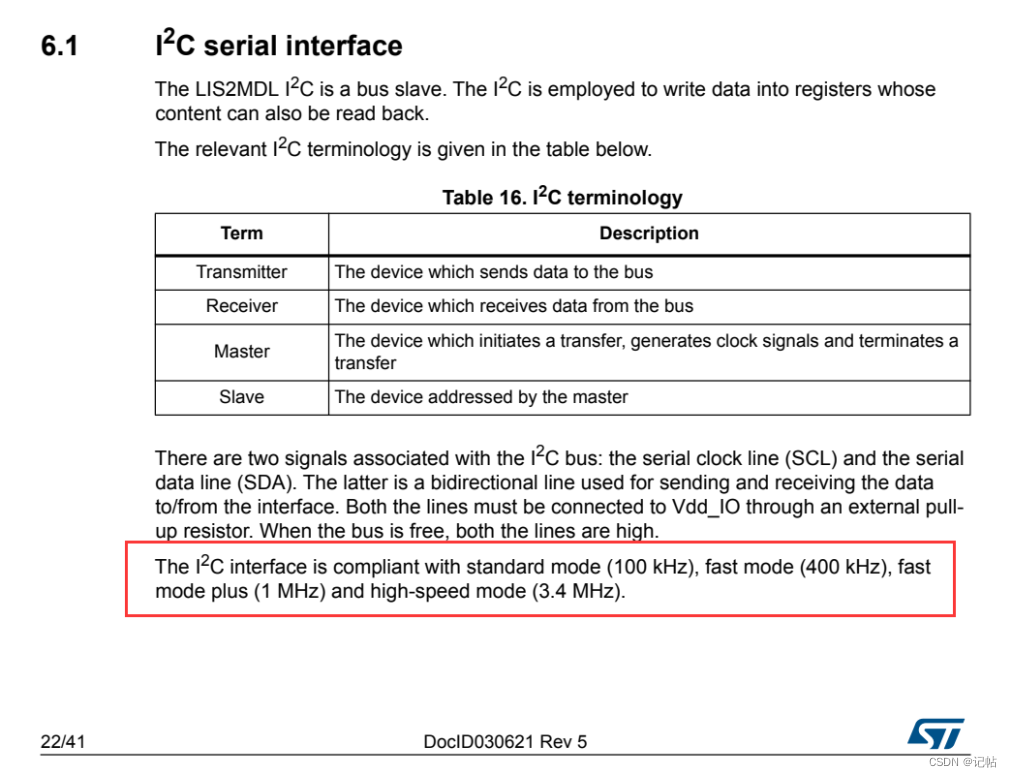
速率
該模塊支持的速度為普通模式(100k)、快速模式(400k)、快速模式+(1M)、高速模式(3.4M)。
參考程序
[https://github.com/STMicroelectronics/lis2mdl-pid]
變量定義
int16_t data_raw_magnetic[3];
static float magnetic_mG[3];
/* Private functions ---------------------------------------------------------*/
/*
* WARNING:
* Functions declare in this section are defined at the end of this file
* and are strictly related to the hardware platform used.
*
*/
static int32_t lis2mdl_platform_write(void *handle, uint8_t reg, const uint8_t *bufp,
uint16_t len);
static int32_t lis2mdl_platform_read(void *handle, uint8_t reg, uint8_t *bufp,
uint16_t len);
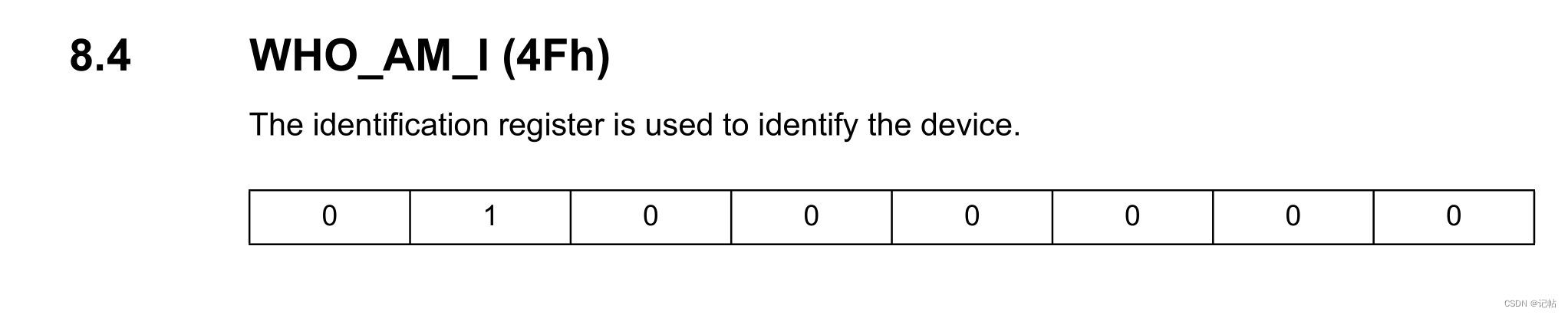
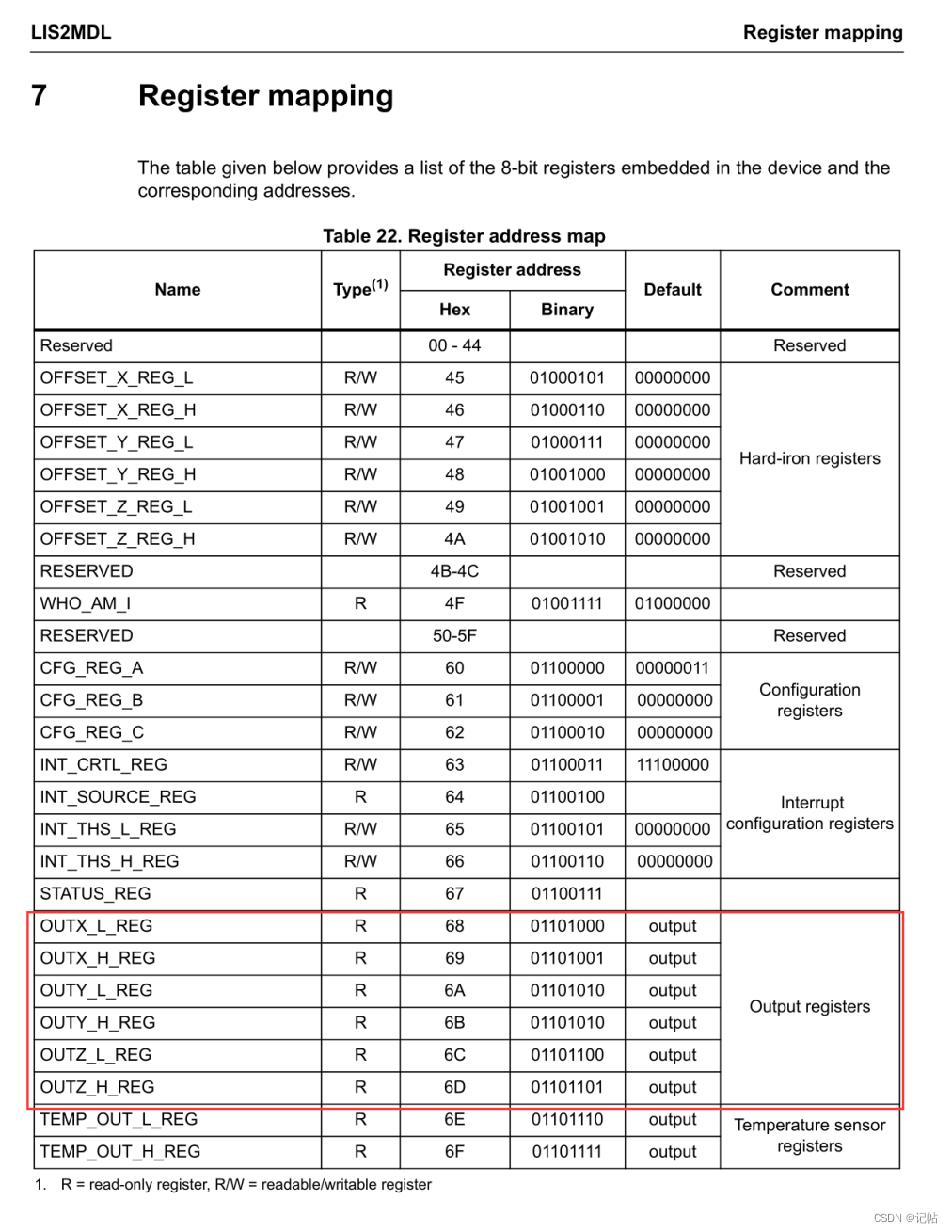
獲取ID
可以向WHO_AM_I (4Fh)獲取固定值,判斷是否為0x40
is2mdl_device_id_get為獲取函數。
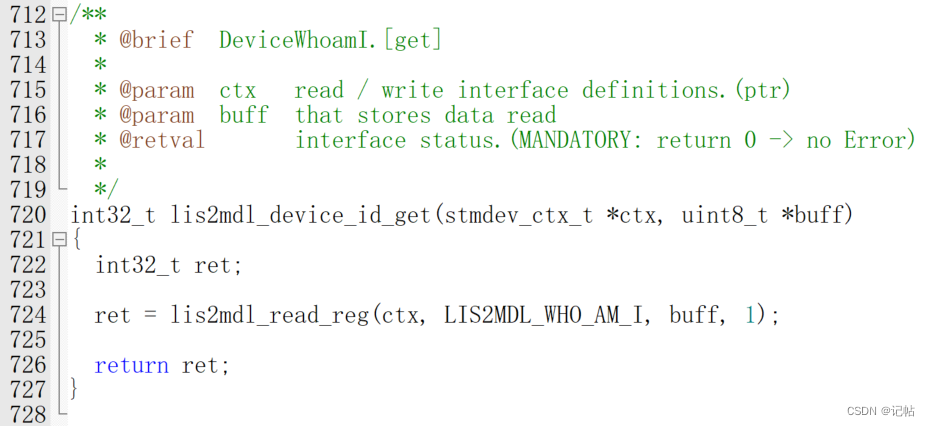
對應的獲取ID驅動程序,如下所示。
/* Check device ID */
lis2mdl_device_id_get(&lis2mdl_dev_ctx, &whoamI);
printf("LIS2MDL_ID=0x%x,whoamI=0x%x",LIS2MDL_ID,whoamI);
if (whoamI != LIS2MDL_ID)
while (1) {
/* manage here device not found */
}
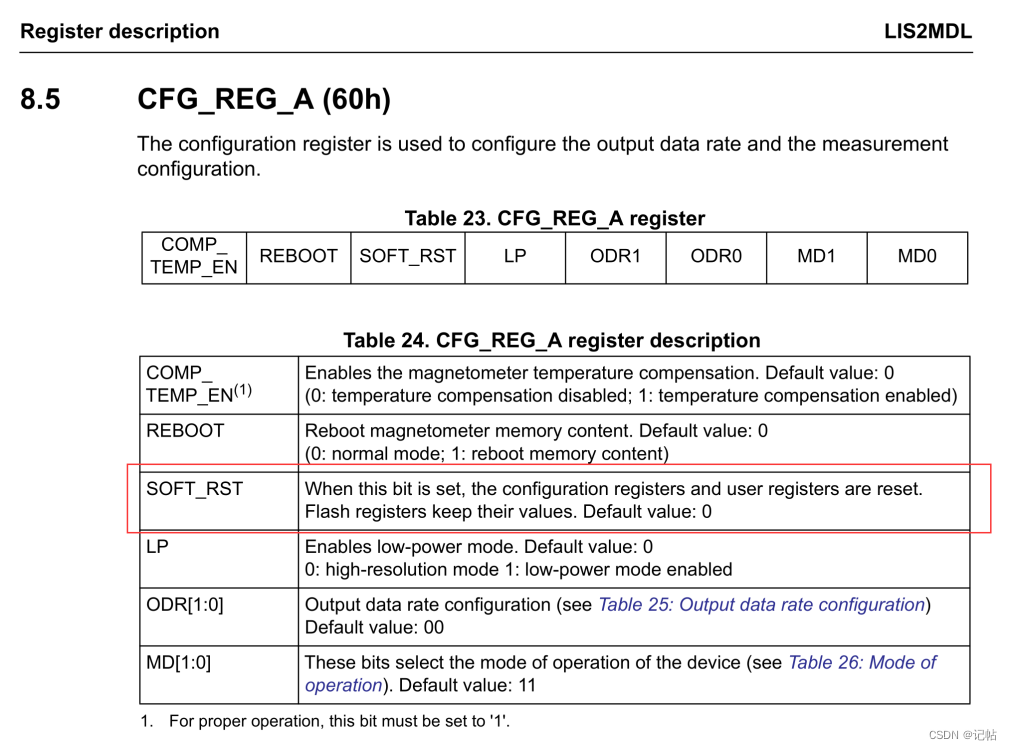
復位操作
可以向CFG_REG_A (60h)的SOFT_RST寄存器寫入1進行復位。
lis2mdl_reset_set為重置函數。
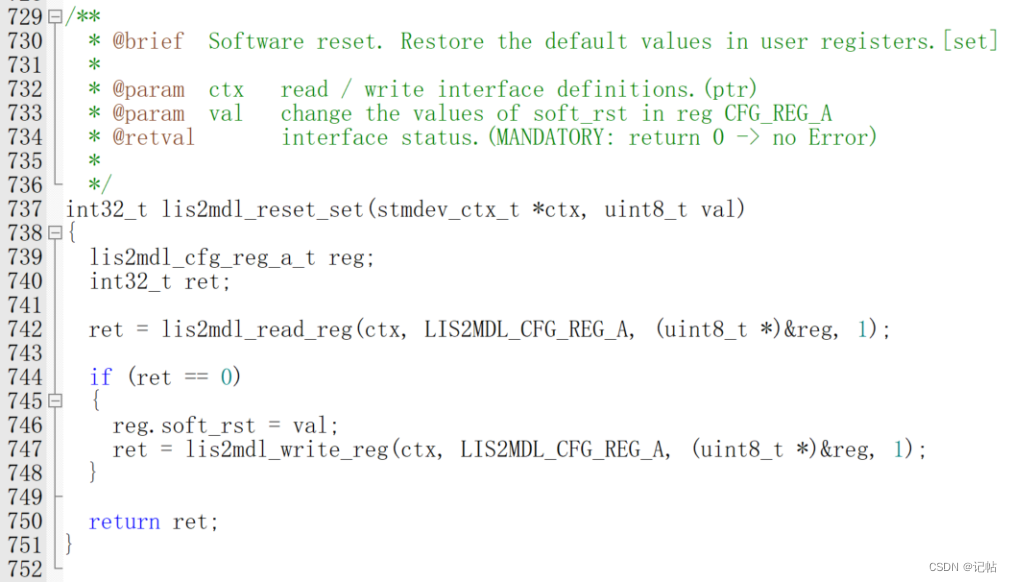
對應的驅動程序,如下所示。
/* Restore default configuration */
lis2mdl_reset_set(&dev_ctx, PROPERTY_ENABLE);
do {
lis2mdl_reset_get(&dev_ctx, &rst);
} while (rst);
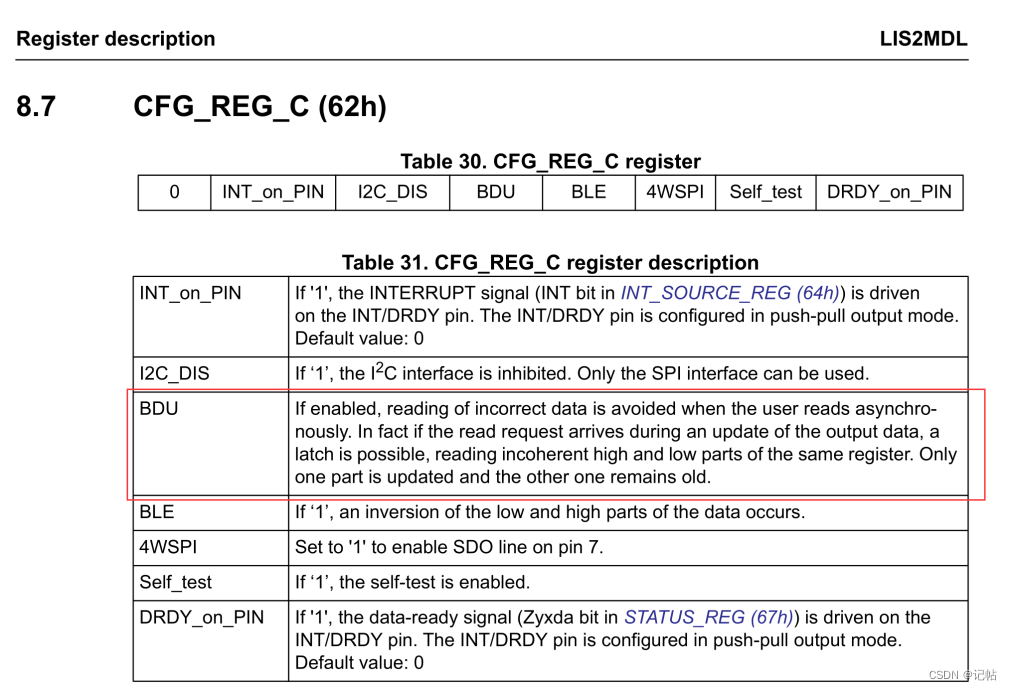
BDU設置
在很多傳感器中,數據通常被存儲在輸出寄存器中,這些寄存器分為兩部分:MSB和LSB。這兩部分共同表示一個完整的數據值。例如,在一個加速度計中,MSB和LSB可能共同表示一個加速度的測量值。
連續更新模式(BDU = ‘0’):在默認模式下,輸出寄存器的值會持續不斷地被更新。這意味著在你讀取MSB和LSB的時候,寄存器中的數據可能會因為新的測量數據而更新。這可能導致一個問題:當你讀取MSB時,如果寄存器更新了,接下來讀取的LSB可能就是新的測量值的一部分,而不是與MSB相對應的值。這樣,你得到的就是一個“拼湊”的數據,它可能無法準確代表任何實際的測量時刻。
塊數據更新(BDU)模式(BDU = ‘1’):當激活BDU功能時,輸出寄存器中的內容不會在讀取MSB和LSB之間更新。這就意味著一旦開始讀取數據(無論是先讀MSB還是LSB),寄存器中的那一組數據就被“鎖定”,直到兩部分都被讀取完畢。這樣可以確保你讀取的MSB和LSB是同一測量時刻的數據,避免了讀取到代表不同采樣時刻的數據。
簡而言之,BDU位的作用是確保在讀取數據時,輸出寄存器的內容保持穩定,從而避免讀取到拼湊或錯誤的數據。這對于需要高精度和穩定性的應用尤為重要。
可以向CFG_REG_C (62h)的BDU寄存器寫入1進行開啟。
對應的驅動程序,如下所示。
/* Enable Block Data Update */
lis2mdl_block_data_update_set(&dev_ctx, PROPERTY_ENABLE);
設置速率
速率可以通過CFG_REG_A (60h)的ODR設置速率。
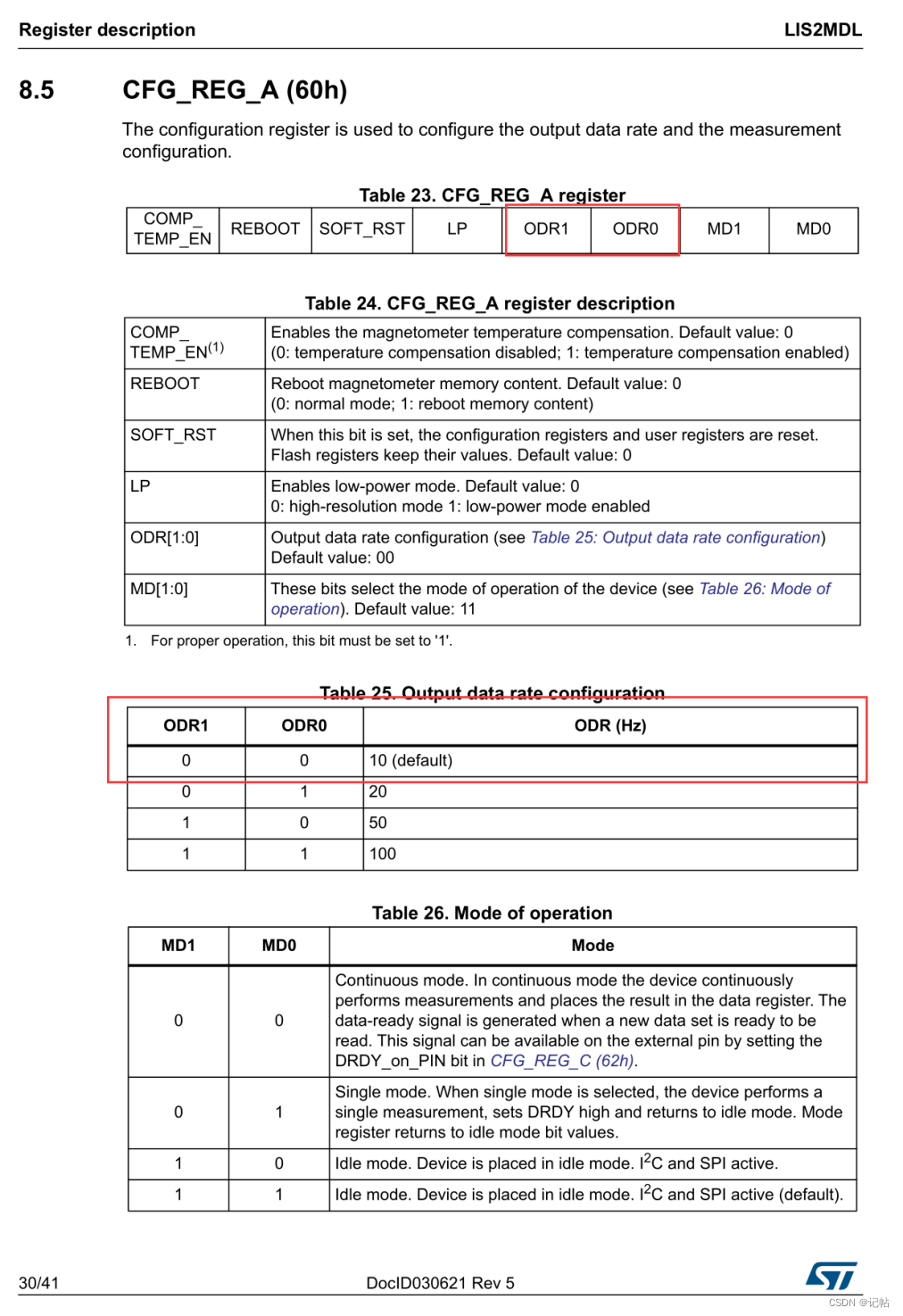
設置速率可以使用如下函數。
/* Set Output Data Rate */
lis2mdl_data_rate_set(&lis2mdl_dev_ctx, LIS2MDL_ODR_50Hz);
啟用偏移消除
LIS2MDL 磁力計的配置寄存器(CFG_REG_B)的OFF_CANC - 這個位用于啟用或禁用偏移消除。
這意味著每次磁力計準備輸出新的測量數據時,它都會自動進行偏移校準,以確保數據的準確性。這通常用于校準傳感器,以消除由于傳感器偏移或環境因素引起的任何誤差。
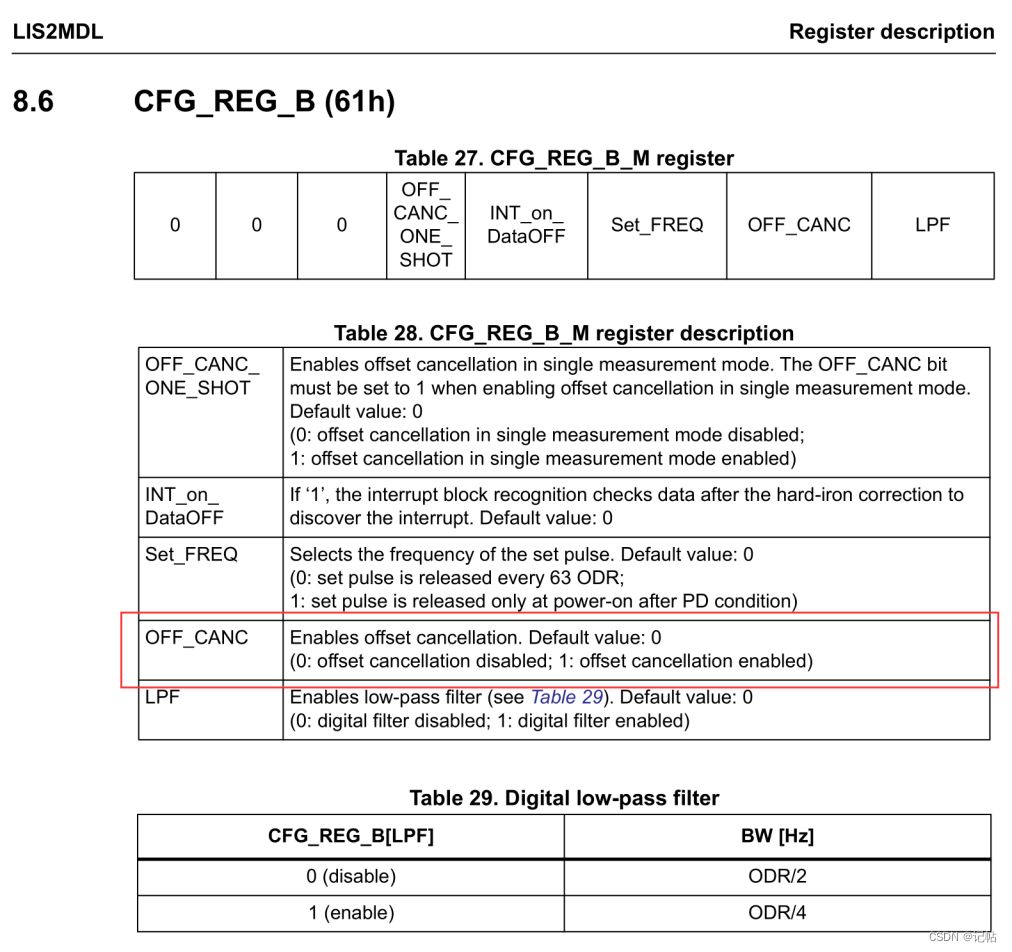
/* Set / Reset sensor mode */
lis2mdl_set_rst_mode_set(&dev_ctx, LIS2MDL_SENS_OFF_CANC_EVERY_ODR);
開啟溫度補償
開啟溫度補償可以通過CFG_REG_A (60h)的COMP_TEMP_EN進行配置。 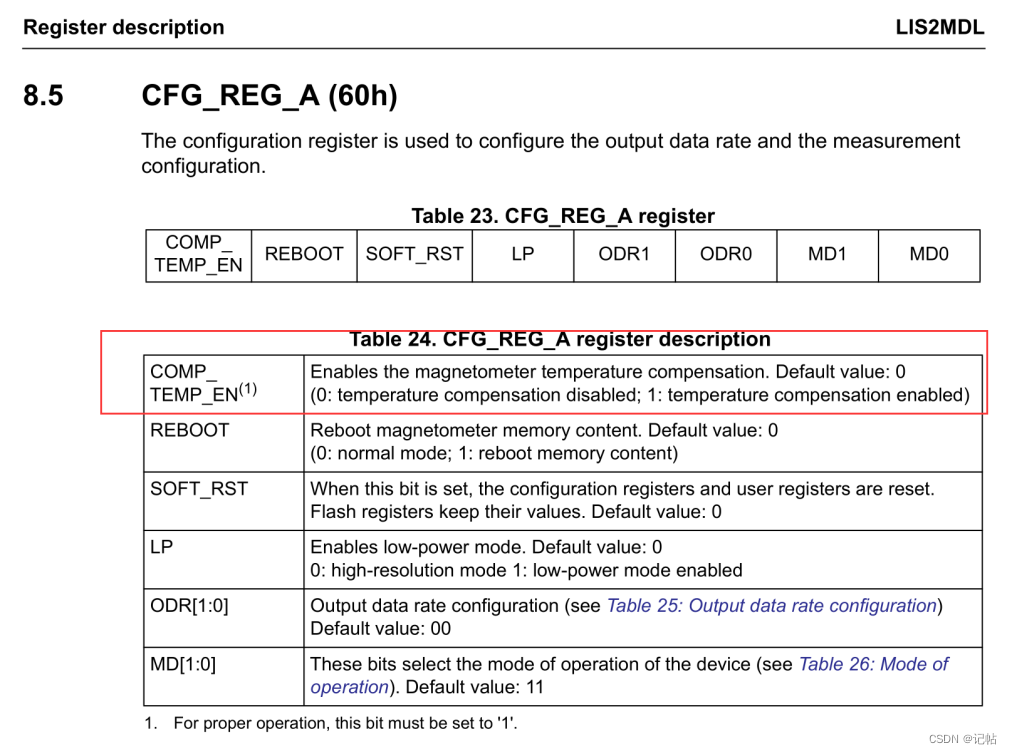
/* Enable temperature compensation */
lis2mdl_offset_temp_comp_set(&dev_ctx, PROPERTY_ENABLE);
設置為連續模式
LIS2MDL 磁力計 CFG_REG_A (60h) 配置寄存器的MD1 和 MD0 - 這兩個位用于選擇設備的工作模式。
00 - 連續模式,設備連續進行測量并將結果放在數據寄存器中。
01 - 單次模式,設備進行單次測量,然后返回到空閑模式。
10 和 11 - 空閑模式,設備被置于空閑模式,但I2C和SPI接口仍然激活
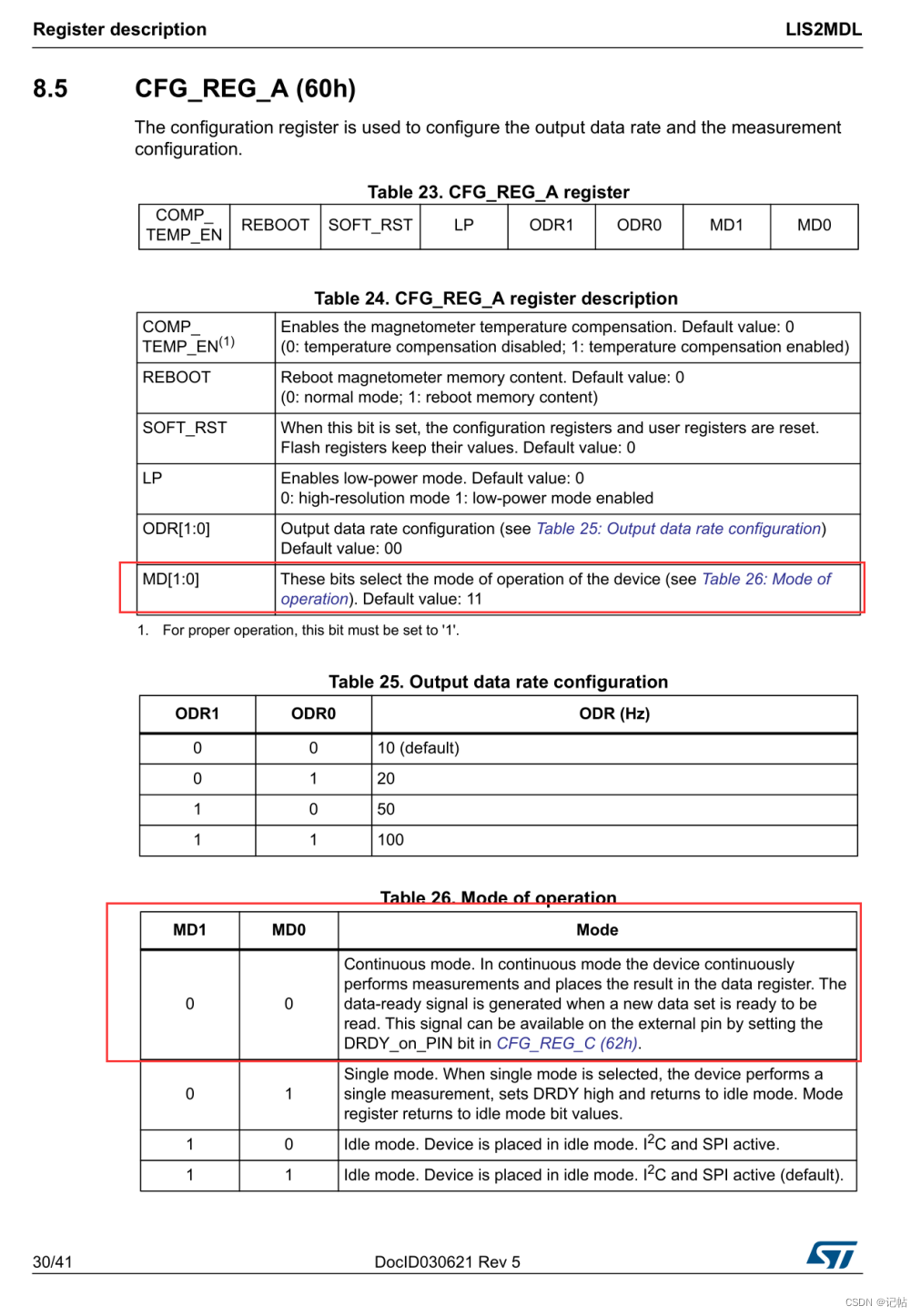
/* Set device in continuous mode */
lis2mdl_operating_mode_set(&dev_ctx, LIS2MDL_CONTINUOUS_MODE);
初始化
/* Initialize mems driver interface */
stmdev_ctx_t lis2mdl_dev_ctx;
lis2mdl_dev_ctx.write_reg = lis2mdl_platform_write;
lis2mdl_dev_ctx.read_reg = lis2mdl_platform_read;
lis2mdl_dev_ctx.mdelay = platform_delay;
lis2mdl_dev_ctx.handle = &SENSOR_BUS;
/* Initialize platform specific hardware */
// platform_init();
/* Wait sensor boot time */
platform_delay(BOOT_TIME);
/* Check device ID */
lis2mdl_device_id_get(&lis2mdl_dev_ctx, &whoamI);
printf("LIS2MDL_ID=0x%x,whoamI=0x%x",LIS2MDL_ID,whoamI);
if (whoamI != LIS2MDL_ID)
while (1) {
/* manage here device not found */
}
/* Restore default configuration */
lis2mdl_reset_set(&lis2mdl_dev_ctx, PROPERTY_ENABLE);
do {
lis2mdl_reset_get(&lis2mdl_dev_ctx, &rst);
} while (rst);
/* Enable Block Data Update */
lis2mdl_block_data_update_set(&lis2mdl_dev_ctx, PROPERTY_ENABLE);
/* Set Output Data Rate */
lis2mdl_data_rate_set(&lis2mdl_dev_ctx, LIS2MDL_ODR_50Hz);
/* Set / Reset sensor mode */
lis2mdl_set_rst_mode_set(&lis2mdl_dev_ctx, LIS2MDL_SENS_OFF_CANC_EVERY_ODR);
/* Enable temperature compensation */
lis2mdl_offset_temp_comp_set(&lis2mdl_dev_ctx, PROPERTY_ENABLE);
/* Set device in continuous mode */
lis2mdl_operating_mode_set(&lis2mdl_dev_ctx, LIS2MDL_CONTINUOUS_MODE);
輪詢讀取數據
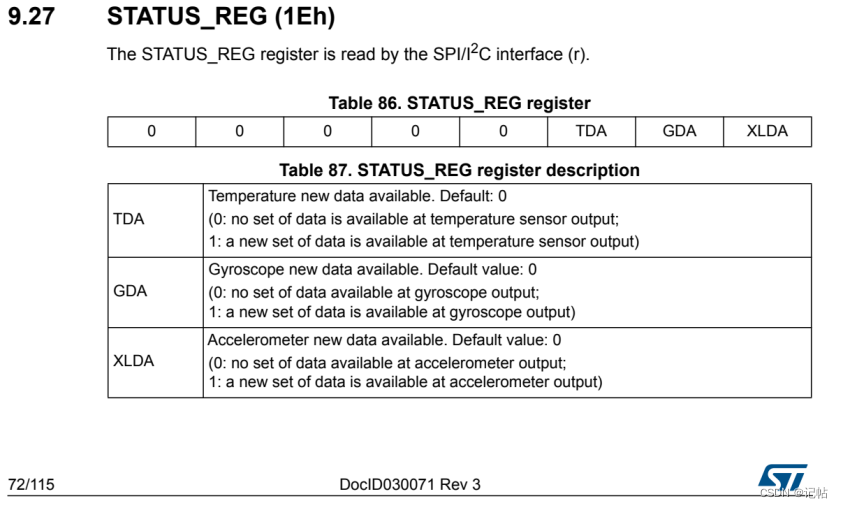
對于數據是否準備好,可以查看STATUS_REG (67h)的Zyxda位,判斷是否有新數據到達。 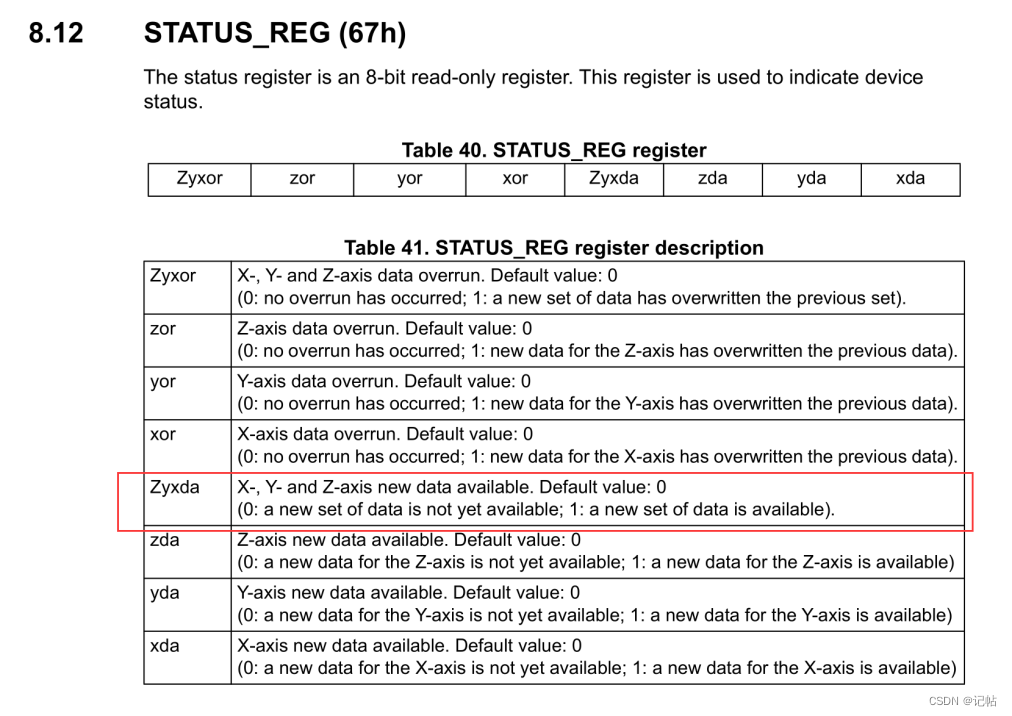
uint8_t reg;
/* Read output only if new value is available */
lis2mdl_mag_data_ready_get(&dev_ctx, ®);
數據OUTX_L_REG(68h)-OUTZ_H_REG(6Dh)獲取。
memset(data_raw_magnetic, 0x00, 3 * sizeof(int16_t));
lis2mdl_magnetic_raw_get(&lis2mdl_dev_ctx, data_raw_magnetic);
magnetic_mG[0] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[0]);
magnetic_mG[1] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[1]);
magnetic_mG[2] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[2]);
if(i==0)
printf("Magnetic field [mG]:%4.2ft%4.2ft%4.2frn",
magnetic_mG[0], magnetic_mG[1], magnetic_mG[2]);
// lsm6ds3tr_c_motion_fx_determin();
添加到如下所示地方。

演示

主程序
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if(fifo_flag)
{
for(int i=0;i< fifo_num;i++)// 遍歷 FIFO 數據數組
{
int16_t gyr;
gyr=(gyr_fifo[i][1]< 8) + gyr_fifo[i][0];
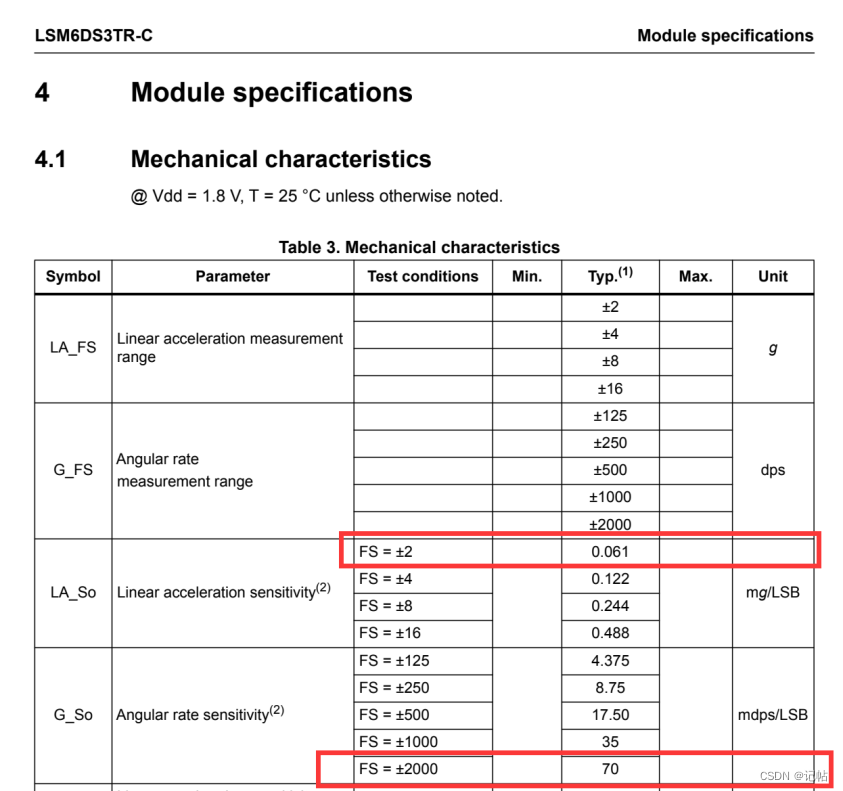
gyr_x =lsm6ds3tr_c_from_fs2000dps_to_mdps(gyr);
gyr=(gyr_fifo[i][3]< 8) + gyr_fifo[i][2];
gyr_y =lsm6ds3tr_c_from_fs2000dps_to_mdps(gyr);
gyr=(gyr_fifo[i][5]< 8) + gyr_fifo[i][4];
gyr_z =lsm6ds3tr_c_from_fs2000dps_to_mdps(gyr);
// printf(
// "gyr_x:%4.2ft%4.2ft%4.2frn",
// gyr_x, gyr_y, gyr_z);
int16_t acc;
acc=(acc_fifo[i][1]< 8) + acc_fifo[i][0];
acc_x =lsm6ds3tr_c_from_fs4g_to_mg(acc);
acc=(acc_fifo[i][3]< 8) + acc_fifo[i][2];
acc_y =lsm6ds3tr_c_from_fs4g_to_mg(acc);
acc=(acc_fifo[i][5]< 8) + acc_fifo[i][4];
acc_z =lsm6ds3tr_c_from_fs4g_to_mg(acc);
// printf(
// "acc_x:%4.2ft%4.2ft%4.2frn",
// acc_x, acc_y, acc_z);
/* 讀取時間戳數據 */
uint32_t timestamp=0;
timestamp=(timestamp_fifo[i][1]< 16)|(timestamp_fifo[i][0]< 8)
|(timestamp_fifo[i][3]);
// printf("Timestamp: %urn", timestamp);
if(deltatime_first==0)//第一次
{
deltatime_1=timestamp;
deltatime_2=deltatime_1;
deltatime_first=1;
}
else
{
deltatime_2=timestamp;
}
memset(data_raw_magnetic, 0x00, 3 * sizeof(int16_t));
lis2mdl_magnetic_raw_get(&lis2mdl_dev_ctx, data_raw_magnetic);
magnetic_mG[0] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[0]);
magnetic_mG[1] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[1]);
magnetic_mG[2] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[2]);
if(i==0)
printf("Magnetic field [mG]:%4.2ft%4.2ft%4.2frn",
magnetic_mG[0], magnetic_mG[1], magnetic_mG[2]);
// lsm6ds3tr_c_motion_fx_determin();
deltatime_1=deltatime_2;
}
fifo_flag=0;
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
審核編輯 黃宇
-
數據采集
+關注
關注
38文章
6053瀏覽量
113621 -
運動檢測
+關注
關注
0文章
34瀏覽量
12612 -
磁力計
+關注
關注
1文章
71瀏覽量
20851
發布評論請先 登錄
相關推薦
驅動LSM6DS3TR-C實現高效運動檢測與數據采集(1)----獲取ID
驅動LSM6DS3TR-C實現高效運動檢測與數據采集(6)----FIFO數據讀取與配置

驅動LSM6驅動LSM6DS3TR-C實現高效運動檢測與數據采集(7)----MotionFX庫解析空間坐標DS3TR-C實現高效運動檢測與數據采
驅動LSM6DS3TR-C實現高效運動檢測與數據采集(10)----融合磁力計進行姿態解算

lsm6ds3tr-c傳感器集合模式無法使用的原因?
LSM6DS3TR-C使用時工作電流比datasheet上大很多是什么原因?
請問LSM6DS3TR和LSM6DS3TR-C兩個型號能否完全兼容?
LSM6DS3TR-C數據讀取異常是安利的問題?怎么處理?
LSM6DS3TR-C的FIFO讀取數據出錯是什么原因造成的?怎么解決?
驅動LSM6DS3TR-C實現高效運動檢測與數據采集(2)----配置濾波器
驅動LSM6DS3TR-C實現高效運動檢測與數據采集(3)----獲取傳感器數據
驅動LSM6DS3TR-C實現高效運動檢測與數據采集(4)----上報匿名上位機實現可視化
驅動LSM6DS3TR-C實現高效運動檢測與數據采集(11)----磁力計校準





 工商網監
工商網監
評論