 串級控制系統副回路為什么不選用PID控制
串級控制系統副回路為什么不選用PID控制
串級控制系統副回路不常選用PID控制的原因,主要基于以下幾個方面:
1. 控制要求差異
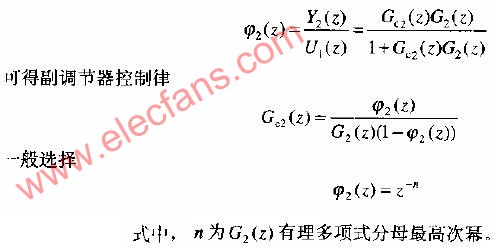
串級控制系統的主要目的是為了高精度地穩定主變量,對主變量的控制要求極高,一般不允許有余差。因此,主控制器通常選擇比例積分(PI)或比例積分微分(PID)控制規律,以確保控制精度和穩定性。相比之下,副回路對副變量的控制要求不嚴,副變量主要跟隨主控制器的輸出變化而變化。因此,副控制器一般采用較為簡單的比例(P)控制規律,必要時引入適當的積分作用,而微分作用通常不是必需的。
2. 系統復雜性與成本
PID控制雖然功能強大,但相比單純的P控制,其實現和調試更為復雜。在副回路中采用PID控制可能會增加系統的復雜性和成本,同時可能并不會帶來顯著的性能提升。因此,從經濟性和實用性的角度出發,副回路更傾向于采用較為簡單的控制策略。
3. 快速響應與穩定性
副回路需要保持較快的響應速度以跟隨主控制器的輸出變化。PID控制中的微分項雖然可以加快響應速度,但也可能引入不必要的噪聲和振蕩,影響系統的穩定性。在副回路中,保持系統的穩定性和快速響應特性通常比追求高精度控制更為重要。因此,為了避免微分項可能帶來的不利影響,副控制器往往不選用PID控制。
4. 擾動處理與主副回路匹配
串級控制系統的設計需要考慮主、副回路中包含的擾動數量和時間常數的匹配問題。副回路中如果包括過多的擾動或時間常數過大,可能會降低其快速控制的效果。同時,如果所有的擾動都包含在副回路中,主調節器可能會失去控制作用。因此,在實際設計中需要權衡各種因素,確保主、副回路的匹配合理。在這個過程中,選擇適當的副控制器控制策略(如P控制)而不是PID控制,可能是基于上述考慮的折衷方案。
綜上所述,串級控制系統副回路不選用PID控制的原因主要包括控制要求差異、系統復雜性與成本、快速響應與穩定性以及擾動處理與主副回路匹配等方面的考慮。在實際應用中,應根據具體需求和系統特性選擇合適的控制策略。
-
控制系統
+關注
關注
41文章
6696瀏覽量
111184 -
回路
+關注
關注
0文章
72瀏覽量
12180 -
PID控制
+關注
關注
10文章
461瀏覽量
40497 -
變量
+關注
關注
0文章
613瀏覽量
28568
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論