 串級pid內環和外環怎么確定
串級pid內環和外環怎么確定
在控制系統中,串級PID控制器是一種常見的控制策略,它通過將兩個PID控制器串聯起來,實現對系統的精確控制。串級PID控制器由內環和外環組成,內環主要負責系統的快速響應和穩定性,外環則負責系統的穩態性能和精度。
一、串級PID控制器的基本原理
1.1 串級PID控制器的定義
串級PID控制器是一種由兩個PID控制器組成的控制策略,其中一個PID控制器作為內環控制器,另一個作為外環控制器。內環控制器主要負責系統的快速響應和穩定性,外環控制器則負責系統的穩態性能和精度。
1.2 串級PID控制器的結構
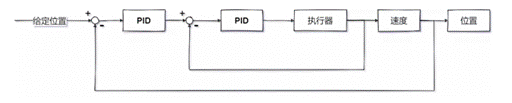
串級PID控制器的結構如圖1所示,其中Gp(s)為被控對象的傳遞函數,Gc1(s)和Gc2(s)分別為內環和外環的PID控制器。內環控制器的輸出作為外環控制器的輸入,外環控制器的輸出作為系統的控制輸入。
1.3 串級PID控制器的控制規律
串級PID控制器的控制規律可以表示為:
Gc1(s) = Kp1 + Ki1/s + Kd1*s
Gc2(s) = Kp2 + Ki2/s + Kd2*s
其中,Kp1、Ki1、Kd1為內環PID控制器的比例、積分、微分參數;Kp2、Ki2、Kd2為外環PID控制器的比例、積分、微分參數。
二、內環PID控制器的確定方法
2.1 內環PID控制器的作用
內環PID控制器的主要作用是實現系統的快速響應和穩定性。通過調整內環PID控制器的參數,可以改善系統的動態性能,提高系統的穩定性。
2.2 內環PID控制器的參數選擇
內環PID控制器的參數選擇主要包括比例參數Kp1、積分參數Ki1和微分參數Kd1的選擇。下面分別介紹這三種參數的選擇方法。
2.2.1 比例參數Kp1的選擇
比例參數Kp1的選擇主要取決于系統的開環增益和開環截止頻率。一般來說,比例參數Kp1應該選擇得足夠大,以保證系統的快速響應。但是,如果比例參數Kp1過大,可能會導致系統的超調和振蕩。因此,需要根據系統的具體情況,選擇合適的比例參數Kp1。
2.2.2 積分參數Ki1的選擇
積分參數Ki1的選擇主要取決于系統的穩態誤差和系統的穩定性。一般來說,積分參數Ki1應該選擇得足夠大,以保證系統的穩態誤差最小。但是,如果積分參數Ki1過大,可能會導致系統的穩定性降低。因此,需要根據系統的具體情況,選擇合適的積分參數Ki1。
2.2.3 微分參數Kd1的選擇
微分參數Kd1的選擇主要取決于系統的動態性能和系統的穩定性。一般來說,微分參數Kd1可以提高系統的穩定性,減小系統的超調。但是,如果微分參數Kd1過大,可能會導致系統的噪聲放大。因此,需要根據系統的具體情況,選擇合適的微分參數Kd1。
2.3 內環PID控制器的整定方法
內環PID控制器的整定方法主要包括試湊法、臨界比例度法、衰減曲線法等。下面分別介紹這三種整定方法。
2.3.1 試湊法
試湊法是一種基于經驗和直覺的整定方法,通過不斷調整內環PID控制器的參數,觀察系統的響應情況,逐步找到合適的參數。
2.3.2 臨界比例度法
臨界比例度法是一種基于系統的開環增益和開環截止頻率的整定方法。首先,根據系統的開環增益和開環截止頻率,計算出臨界比例度Kp1c,然后根據Kp1c選擇內環PID控制器的比例參數Kp1。
2.3.3 衰減曲線法
衰減曲線法是一種基于系統的動態性能的整定方法。首先,根據系統的動態性能要求,確定系統的衰減比和振蕩頻率。然后,根據衰減比和振蕩頻率,計算出內環PID控制器的比例參數Kp1、積分參數Ki1和微分參數Kd1。
三、外環PID控制器的確定方法
3.1 外環PID控制器的作用
外環PID控制器的主要作用是實現系統的穩態性能和精度。通過調整外環PID控制器的參數,可以改善系統的穩態誤差和系統的穩定性。
3.2 外環PID控制器的參數選擇
外環PID控制器的參數選擇主要包括比例參數Kp2、積分參數Ki2和微分參數Kd2的選擇。下面分別介紹這三種參數的選擇方法。
-
控制器
+關注
關注
112文章
16332瀏覽量
177806 -
控制系統
+關注
關注
41文章
6604瀏覽量
110576 -
PID
+關注
關注
35文章
1472瀏覽量
85478 -
函數
+關注
關注
3文章
4327瀏覽量
62569
發布評論請先 登錄
相關推薦
PID調節外環PID調節外環
壓控大功率電流源的串級PID控制算法設計







 工商網監
工商網監
評論