 【技術干貨】CAN通訊簡介
【技術干貨】CAN通訊簡介
CAN的起源
傳統的汽車線束連接比較復雜。動力域控制器、儀表盤、車身域控制器之間用大量線束連接。
動力域控制包括:發動機控制Engine Control、變速箱控制Transmission Control、防抱死系統控制ABS、主動懸架控制Active Suspension等等。
車身域控制包括:車門控制Door Control、桌椅控制Seat Control、電源鎖Power Locks、空調Air Condition、燈光控制Light Control、氣囊Airbag等等。
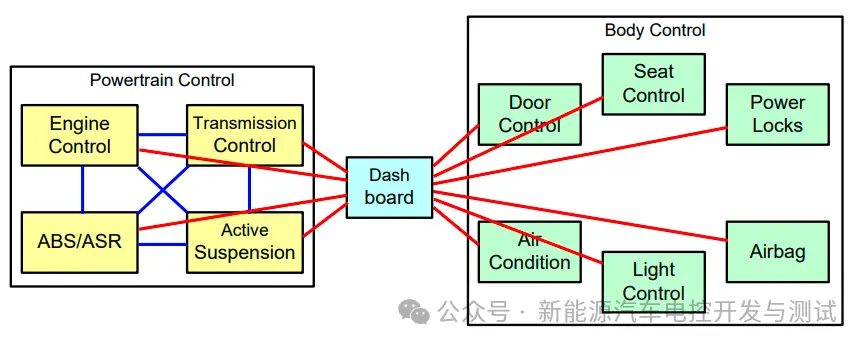
汽車線束連接圖
傳統線束連接比較紊亂加大了裝配錯誤率;眾多控制器需要大量的信號數據線,整車線束長度能達到2500米,這個時候會導致整車的電子控制系統線路復雜,維修起來也非常困難;另外加大了成本以及影響了整車的經濟學與動力性。
1983年,德國Bosch開始研究車上網絡技術,Bosch公司為解決現代汽車中眾多控制單元之間的實時數據交換而開發的一種串行通信協議。
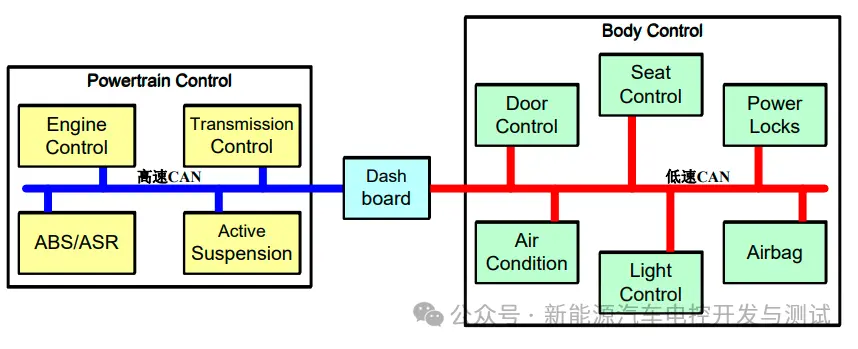
CAN網絡通訊
CAN通訊優點
具有實時性強、傳輸距離較遠、抗電磁干擾能力強、成本低等優點;
采用雙線串行通信方式,檢錯能力強,可在高噪聲干擾環境中工作;
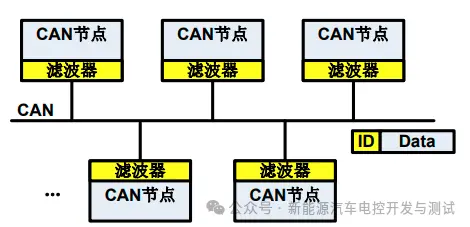
具有優先權和仲裁功能,多個控制模塊通過CAN控制器掛到CAN-buS上,形成多主機局部網絡;
可根據報文的D決定接收或屏蔽該報文;
可靠的錯誤處理和檢錯機制;
發送的信息遵到破壞后,可自動重發;
節點在錯誤嚴重的情況下具有自動退出總線的功能;
報文不包含源地址或目標地址,僅用標志符來指示功能信息、優先級信息。
CAN的歷史
1983年,Bosch開始研究車上網絡技術
1986年,Bosch在SAE大會(汽車工程協會)公布CAN協議
1987年,Intel和Philips先后推出CAN控制器芯片
1991年,Bosch頒布CAN 2.0技術規范,CAN2.0包括A和B兩個部分
1991年,CAN總線最先在Benz S系列轎車上實現
1993年,ISO頒布CAN國際標準 ISO-11898
1994年,SAE頒布基于CAN的J1939標準
2003年,Maybach發布帶76個ECU的新車型(CAN,LIN,MOST)
2003年,VW發布帶35個ECU的新型Golf
現在,在每一輛新車均裝配有CAN局域網
CAN的應用領域
汽車制造
大型儀器設備 醫療器械:CT
工業控制:電梯,地鐵,航天
智能家庭和生活小區智能化:遠程抄表,防盜,防火
智能機器人
CAN的特性
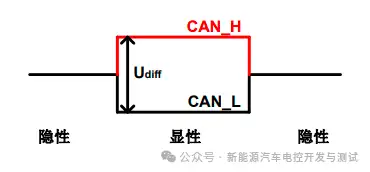
1. 使用雙線差分信號:兩根線上都傳輸信號,這兩個信號振幅相等相位相差180°極性相反,所有的有電壓信號都是差分的。差分信號是一對大小相等而極性相反的對稱信號。差分信號傳輸在收端是靠差分放大器來檢測的。差分放大器只對兩路輸入信號之間的差值起放大作用,而對兩路輸入信號共同對地的電位不起作用。
2. 協議本身對節點的數量沒有限制,總線上節點的數量可以動態改變。
3. 發送的報文可以被總線上所有節點同時接收。
4. 多主站結構,各節點平等
5. 每個報文的內容通過標識符識別,標識符在網絡中是唯一的。

6. 根據需要可進行相關性報文過濾。
7. 保證系統數據一致性: CAN提供了一套復雜的錯誤檢測與錯誤處理機制,比如CRC檢測、錯誤報文的自動重發、臨時錯誤的恢復以及永久錯誤的關閉。
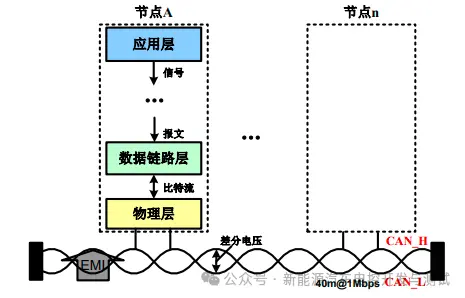
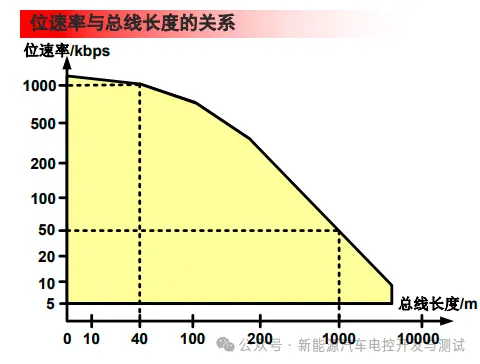
8. 使用雙絞線作為總線介質,傳輸速率可達1Mbps,設計理論總線長度<=40米,隨著線纜長度增加,速率傳導效率會下降。
9.總線訪問—非破壞性仲裁的載波偵聽多路訪問/沖突避免CSMA/CA (Carrier Sense Multiple Access/Collision Avoidance)
多路訪問(MA):如果總線空閑,則在同一時刻多個節點可同時訪問總線(向總線發送數據)
沖突避免(CA):節點在發送數據過程中要不停地檢測發送的數據,確定是否與其它節點數據發生沖突,并通過非破壞性仲裁機制避免沖突
載波偵聽(CS):總線上各個節點在發送數據前都要偵聽總線的通信狀態。
來源:新能源汽車電控開發與測試
-
CAN
+關注
關注
57文章
2744瀏覽量
463619 -
通訊
+關注
關注
9文章
902瀏覽量
34889 -
汽車線束
+關注
關注
3文章
165瀏覽量
15499
發布評論請先 登錄
相關推薦
STM32的CAN外設簡介
基于CAN總線的電梯串行通訊
基于DSP的電動汽車CAN總線通訊技術設計
CAN總線系統測試技術簡介
無線通訊OFDM調制技術原理簡介
CAN多主通訊技術在煤礦頂板監測系統中的應用

CAN—雙機通訊
STM32--CAN通訊實驗

虹科干貨 | 帶你全面了解“CAN總線錯誤”(三)——CAN節點狀態與錯誤計數器

Loto實踐干貨(3) 測量CAN總線通訊數據
CAN和CANFD協議簡介(下)







 工商網監
工商網監
評論