

今天給大家分享一款3合1激光測距儀!
在各種“一定會讓我血壓升高的對象”列表中,卷尺、纏在一起(和松脫)的延長線可以說和園藝軟管并列。除非在其測量區域的下方表面都十分平整順暢,否則在我的臂展之外,卷尺通常無法可靠發揮作用(這要歸咎于重力)。
金屬卷尺在曲面上的表現不佳,而織布卷尺更容易受到重力的影響。說到這一點,在不使用時,唯一能讓織布卷尺保持整齊的方法就是使用橡皮筋,但橡皮筋難免會滑落,一樣會讓放置的抽屜一片狼藉;而當使用會自動卷繞的金屬卷尺時,難免也會拍打、刮傷或甚至在過程中劃傷你的手(或身體的它部位)。
這就是為什么去年10月下旬,當Woot網購平臺以19.99美元的價格出售Dremel HSLM-01 3合1數字測量工具時,我一看到就雀躍不已,立馬出手購入三個:一個作為圣誕禮物送給我姐夫,另一個送給我自己,第三個就用來拆解。

看看另一張照片,其中的標簽可能更有助于解釋您剛才看到的內容。而且,在此設備屏幕上其實還顯示著更有意義的信息范例:


默認的激光配置號稱能以±1/8英寸的精度,可靠地支持測量超過50英尺:

而其圓附件(Wheel Adapter)可以用來測量彎曲表面:

卷尺配件(沒錯,我無法完全擺脫卷尺,但至少這款工具是可選的,而且在某些情況下仍有用武之地)在評估周長時更為精確:
那讓我們開始拆吧!先來看看這次拆解的目標,首先是必備的外盒照:

再來看看里面有些什么東西:

這只是部分的文件數據,以及隨附的兩節AAA電池,我會將它們好好地用在其他地方。仔細看看竟還有Arm和意法半導體(ST)的技術授權?這可真讓人好奇!
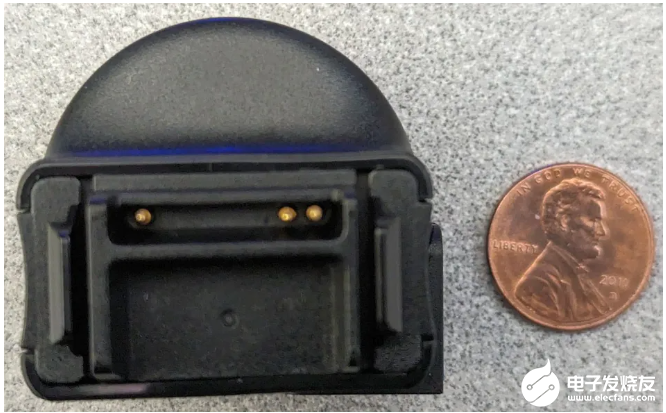
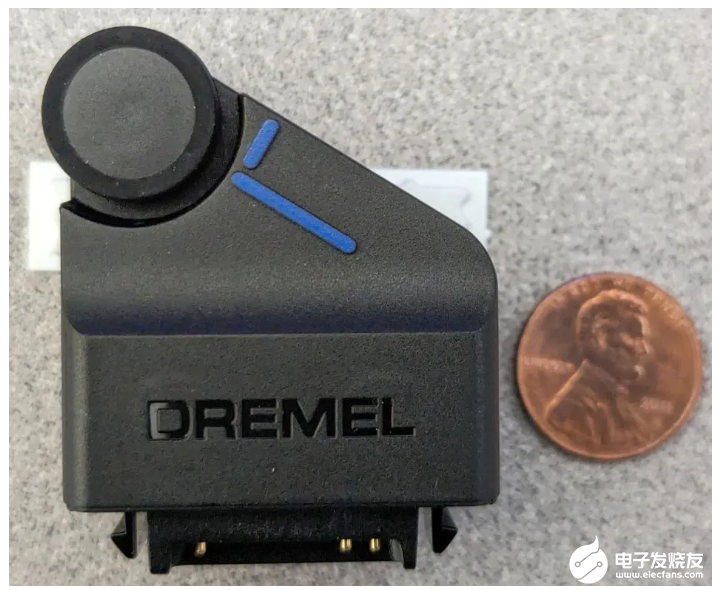
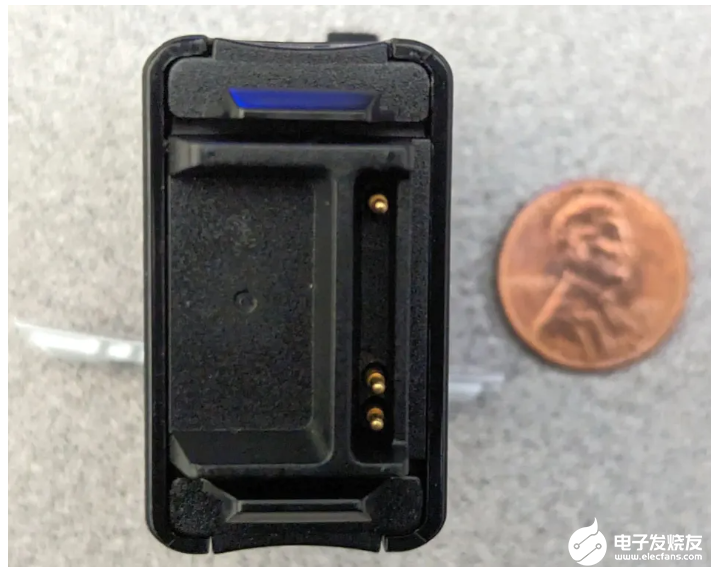
接來是設備頂部的快照,照例附上一枚直徑為0.75英寸(19.1mm)的一美分硬幣,用于尺寸的對照;同時,翻過來瞧瞧并不那么令人興奮的底部照片:



現在正是從概念上解釋這些設備如何運作的好時機。維基百科(Wikipedia)一般將它稱為激光測距儀:
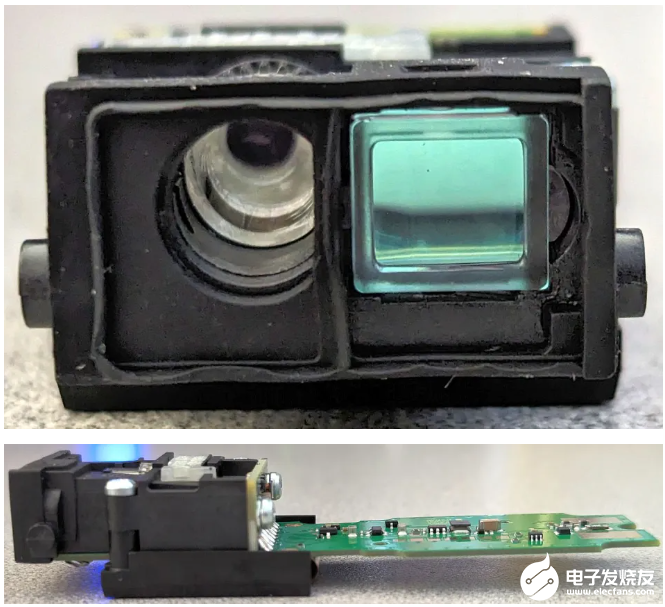
激光測距儀(laser rangefinder或laser telemeter),是一種使用激光束測定物體距離的測距儀。最常見的激光測距儀是根據飛行時間(time of flight;ToF)原理進行操作,即向目標發送一束窄激光脈沖,然后測量脈沖從目標反射并返回發送者所需的時間。由于光速較快,這種技術不適合高精度的次毫米測量,在此情況下通常使用三角測量或其他技術。這是一種無掃描的激光光達(LiDAR)。
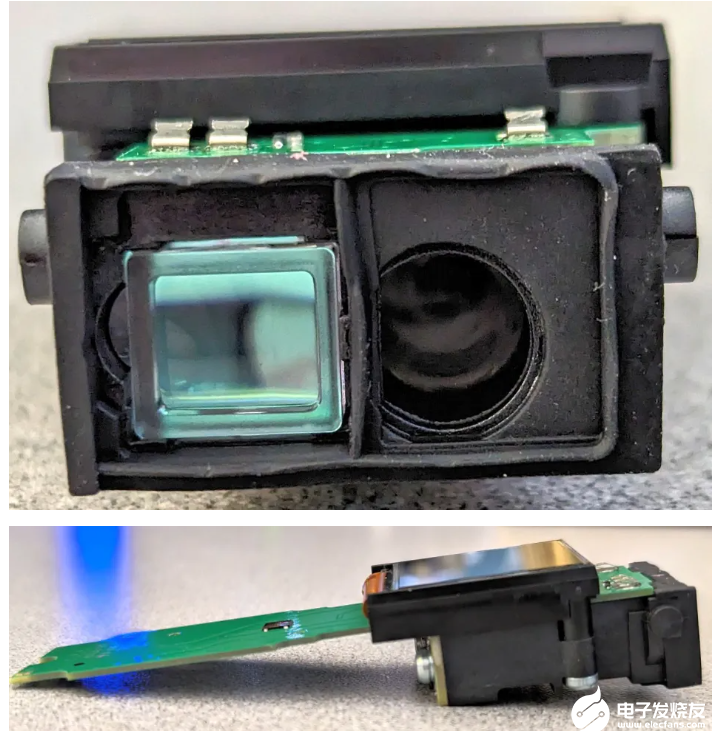
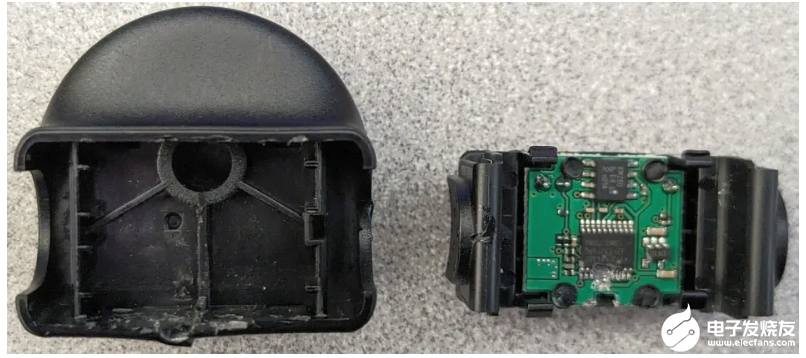
如上所述,它所采用的基本原理被稱為“飛行時間”,是計算機視覺和其他應用中辨別深度的三種最常用方法之一(與人類視覺系統采用的立體視覺和Microsoft Kinect最初采用的結構光并列)。在前一張圖片中,右邊是激光照明發射器(Class 2且<1mW),左邊是圖像傳感器接收器。我猜這就是為什么在說明書中附上了ST授權之故。三個金屬觸點與其匹配的引腳(你很快就會在不需要激光的適配器上看到)。
左側和右側的紋理和橡膠材質(便于使用者的手牢固握持)也是如此(左側底部的兩孔結構設計可能是用于包裝中未隨附的“皮帶”):

我故意把正面拍得偏離中心一些,以避免光滑的顯示器和外殼表面反光;表面較暗的背面則沒有反光問題:
我不知道電池盒內的白色長方形物體是什么,也沒有勇氣將其切開來進行更徹底的檢查(可能會是RFID跟蹤標簽,讀取器?):

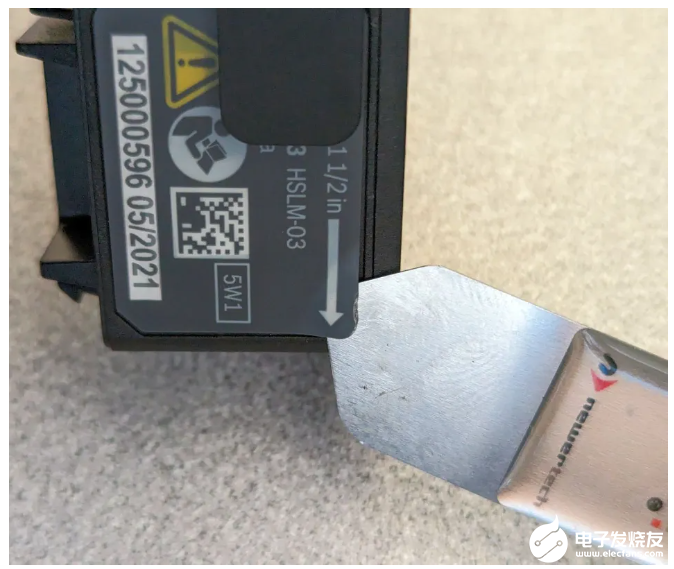
這張背面標簽的特寫可以作為我最初拆解步驟的圖片說明。而且,正如我所猜測到的,其下還有螺絲!
你應該知道接下來會發生什么…讓它完全拆解!


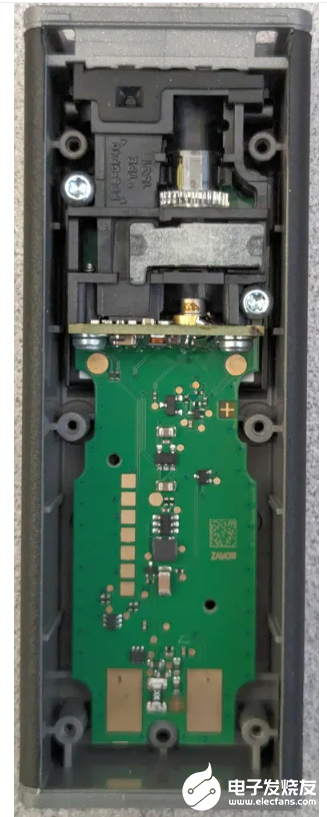
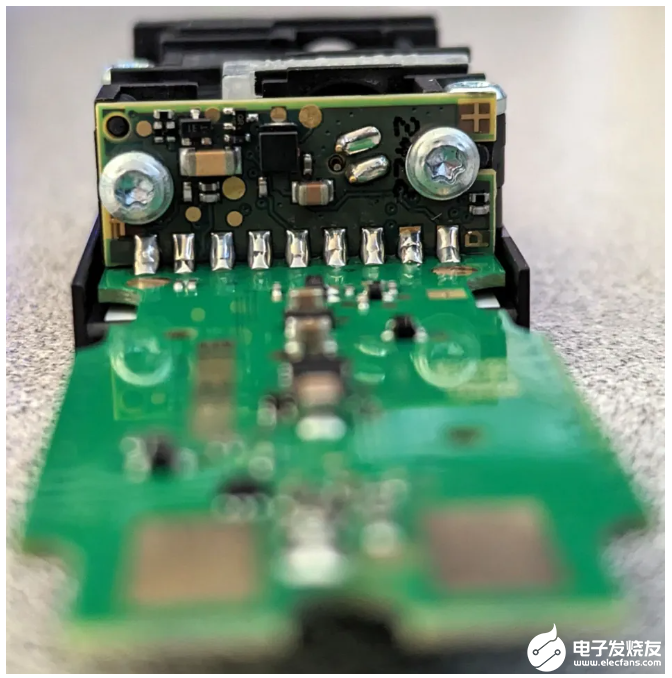
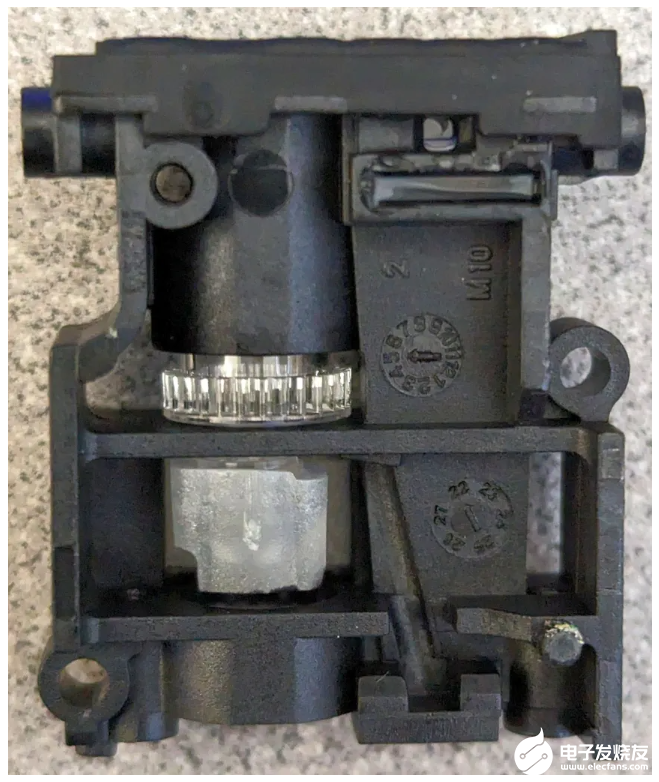
我們大致上已經能夠看到右上角的激光發射器功能模塊(配有散熱片)和左上角的接收器功能模塊。事實上,整個內部組件都可以直接取出來,無需再擰螺絲、拆膠水等。

從方向的角度來看,右側現在看到的是外殼前半部的內部情況。請注意先前提到的三個頂部金屬觸點的金屬延伸部分,它們很可能壓在印刷電路板(PCB)本身搭配的觸點上(柔性的?)。
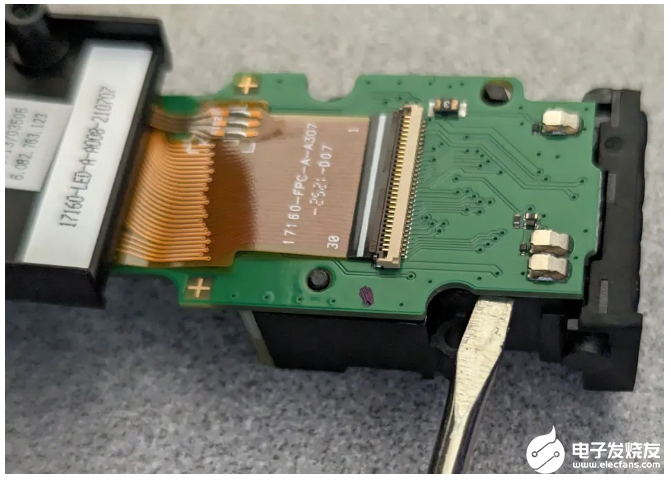
現在我們可以將它翻轉過來,第一次看到PCB的另一面(甚至更裸露)。另一張照片是先前已經看過的角度的照片,不過這次是沒有外殼的;甚至也可以再從不同角度看看:

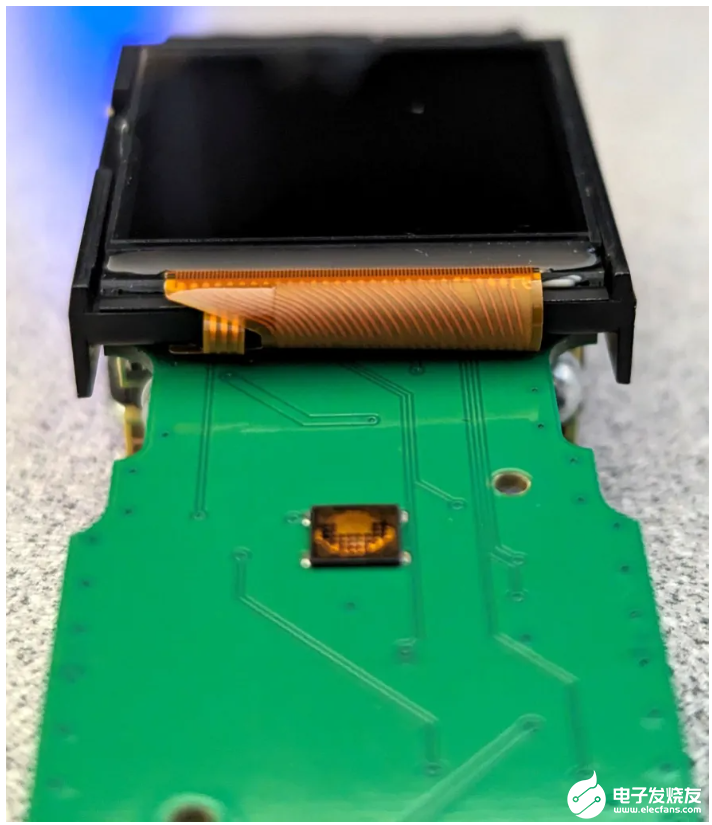
你可能已經猜到了,顯示器除了以軟性線纜與PCB連接之外,并未連接至PCB,因此可以很容易地來個180°翻轉。


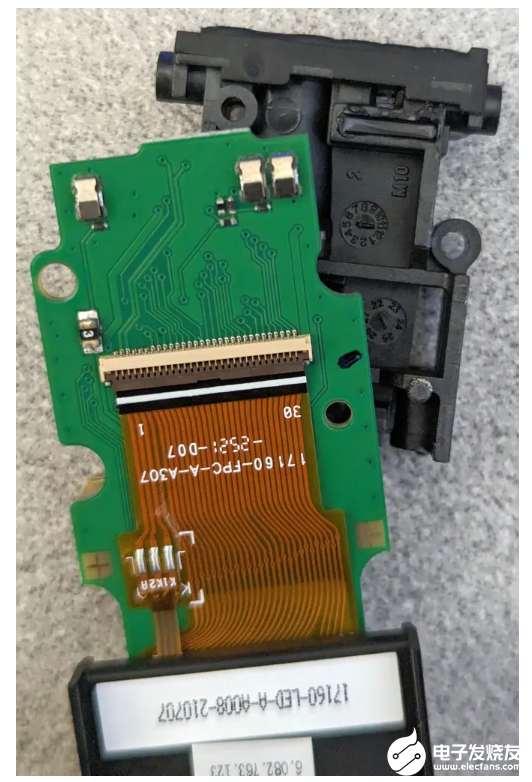
而說到翻轉,讓我們把整個PCB翻過來背面,現在也可以看到已經沒有之前固定它的外殼束縛了:
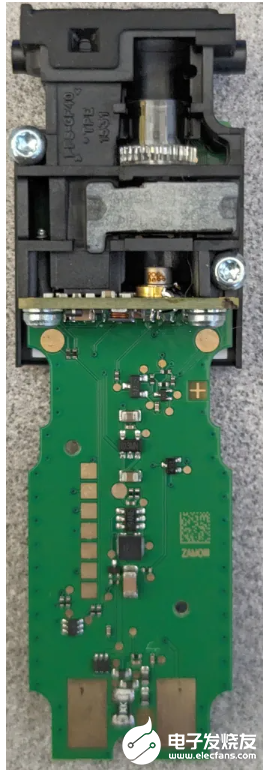
換幾個角度看看:
看到那兩顆螺絲了嗎?從拆卸的角度來看,就算擰下這兩顆螺絲也無法讓我們更進一步。
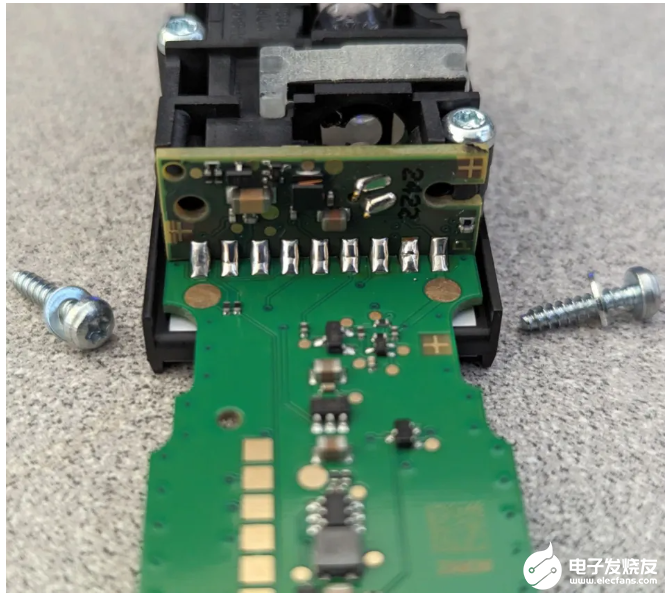
但擰下在上面的另兩顆螺絲后,就大功告成了:
將PCB翻轉過來,并在PCB和ToF子之間插入一個“楔子”(小號一字螺絲起子),直接將后者卸下:
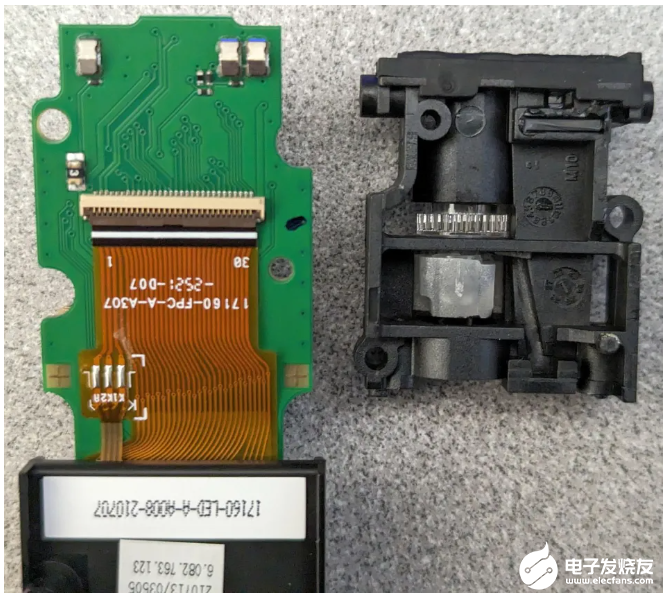
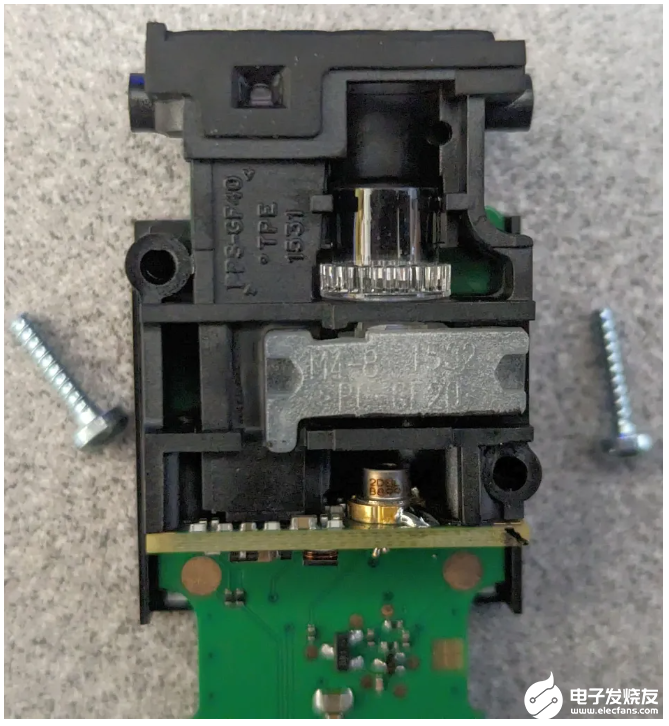
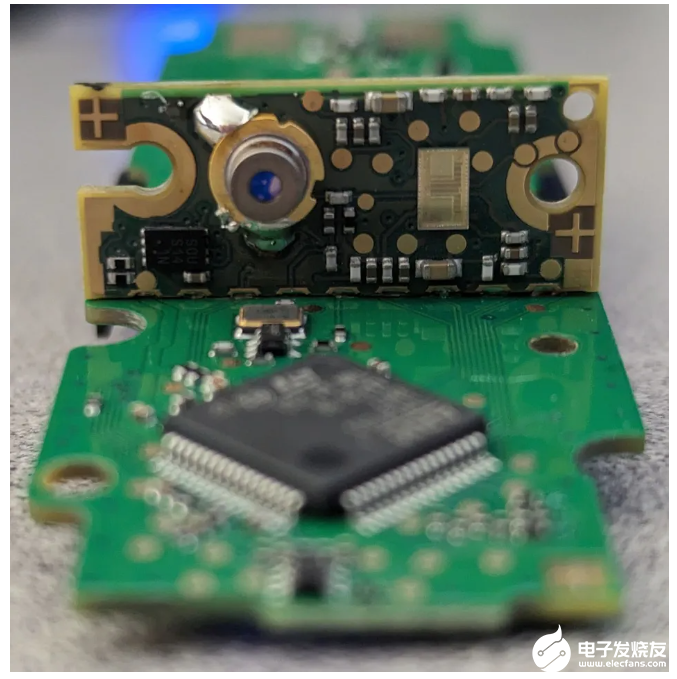
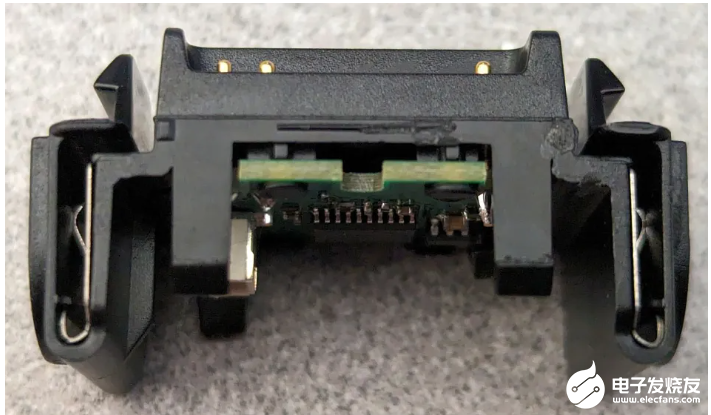
這是現在露出的ToF模塊底部,以及之前看到的正面和末端,這次沒有PCB:
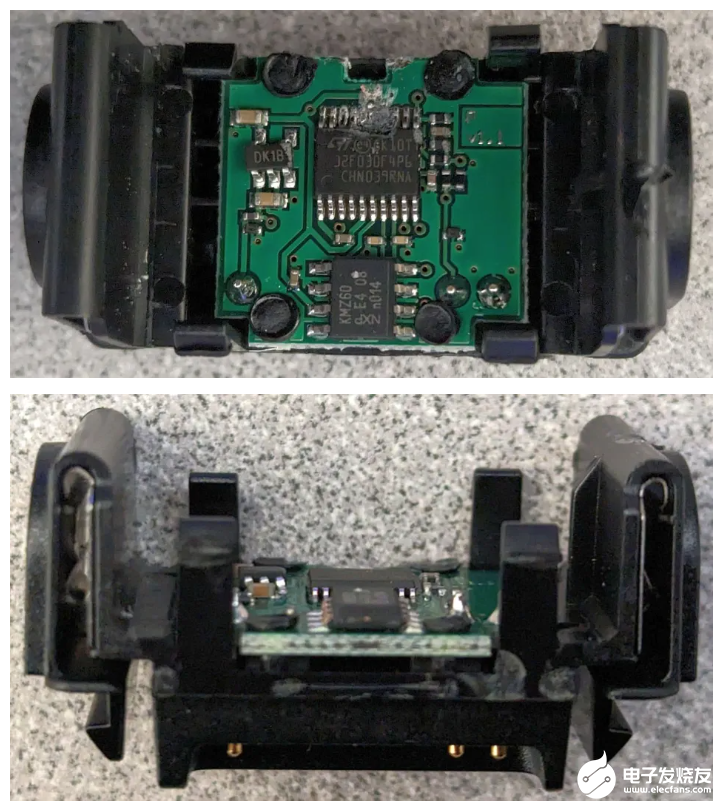
原本還在ToF模塊下方這個才剛露出來的是系統處理器,即采用Arm Cortex-M0的ST STM32F051R8T7處理器(令人驚喜!但如果您還記得之前的授權數據就不一樣了……)。
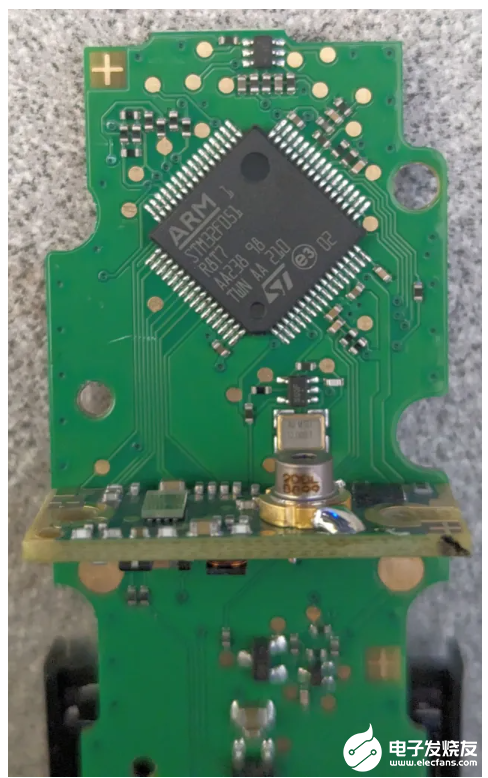
另外新顯示的是左側的激光器,它為同側ToF模塊光學器件提供信號,右側是由模塊另一半光學組件提供信號的圖像傳感器(請注意,在這個方向上,PCB與其正常操作時的配置是顛倒的)。然后,我差點就迫止步于此了,幸好在底座頂部邊緣的三個金屬觸點引起了我的興趣:

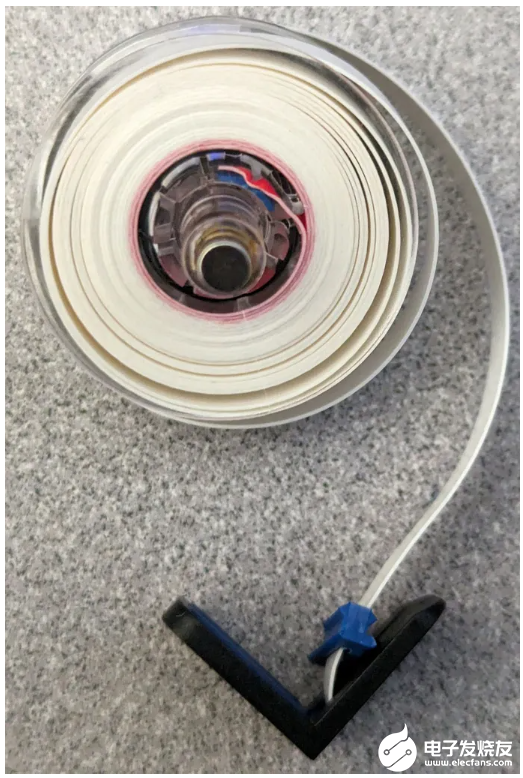
適配器中一定有匹配的電路,對吧?我想還是先滿足一下好奇心再說。反正也不分先后順序,就先從長期以來的測量媒體克星—Tape Adapter測量卷尺開始,分別是正視圖、俯視圖以及底視圖,并露出之前預告過的接腳:

左側和右側照片,這讓我們第一次看到了膠帶末端的尖端:

再從背面看看兩個尖端:

上次剝離標簽成功了,為什么不再試一次呢?

揭露開來的是兩個塑料標簽,我好像有點健忘,馬上就把它們給忘了(敬請期待)。畢竟,頂部的接縫看起來很誘人,對吧?而且,看起來這個動作的效果還不錯:

看看頂蓋內部照,在它中間的凹槽與轉軸“彈簧”一側的末端相吻合,很快就會看到;另一張是外殼底面的內部,看到中間圓孔底部有一個IC嗎?讓我想想…
現在來看看通常位于二者之間的轉軸。先看俯視圖。盤繞的金屬彈簧通常會完全嵌入于塑料件中,其末端則插入之前看到的頂蓋內凹槽;從底面照來看,至少膠卷并非采用可能傷到手的金屬:

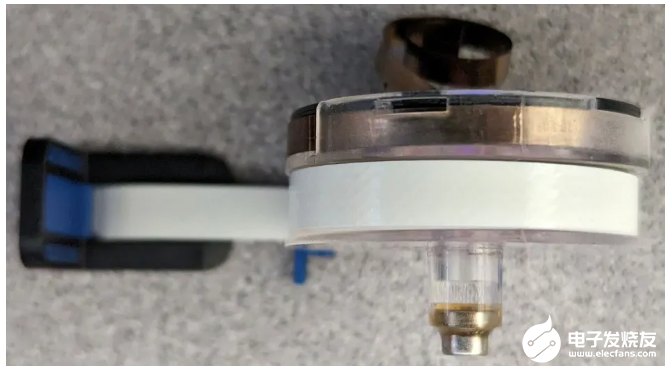
安裝在適配器中使用時的側視圖。順便說一下,那個圓孔里的轉軸……是金屬的。(還記得之前說過用橡皮筋保持布質卷尺整潔的方法嗎?):
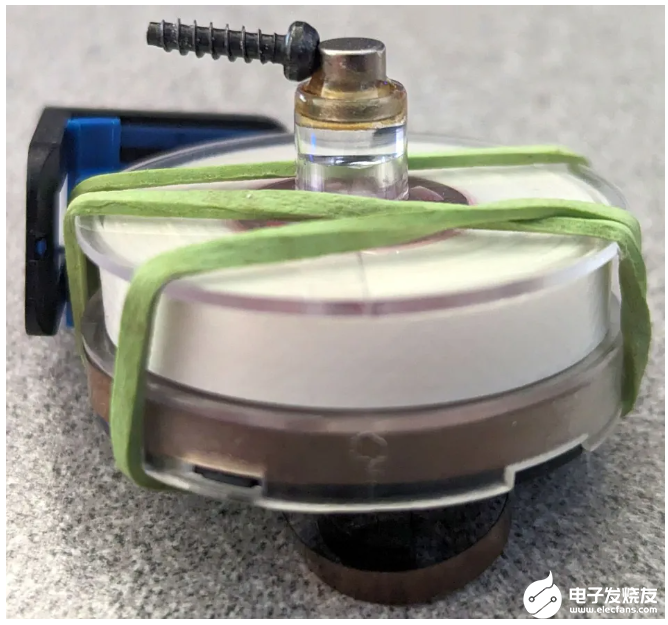
接下來讓我詳細說明之前說過的“忘了塑料標簽”那件事。起初一切都很順利…

后來,我被卡住了,無法再用力把內部組裝拉出來。于是,我把之前看到的一字螺絲起子卡在一旁,然后用楔子使其搖出來:
遺憾的是,在此過程中弄壞了PCB上的一個IC:
如果我把兩個塑料片都取下來,那就可以開心地回家了。“活到老,學到老”,所幸我還能辨認出封裝標記。較大的芯片也是ST生產的(毫不意外!),這是另一款采用Arm Cortex-M0的微控制器(MCU)——STM32F030F4。一開始,我以為另一款IC (我們之前在圓孔底部看過)可能是霍爾效應傳感器,但事實并非如此:它是恩智浦半導體(NXP Semiconductors)的KMZ60磁阻角度傳感器,集成了放大器,通常用于角度控制應用和無刷直流(DC)馬達。在此情況下,使用者的肌肉就是馬達!有意思吧?
現在來看看這款工具的另一個附件—Wheel Adapter,正面照與頂部:
底部(又是插銷!請注意,之前看到的神秘白色條帶用于斜頂適配器下方的支撐設備),以及貼有卷標的背面:
去掉標簽:

我真是料事如神,不是嗎?但提醒一下我自己:這次可千萬別忘了那兩個已經露出來的塑料標簽。畢竟,這次順利多了:


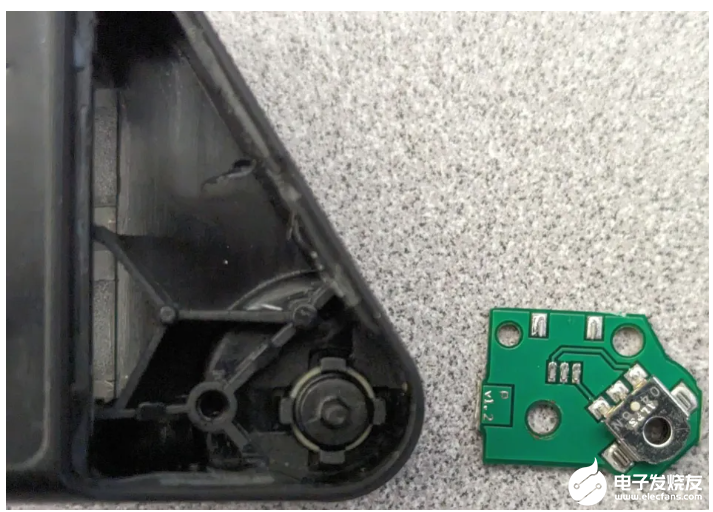
但是,這次有兩個微型PCB,一個在觸針下面,另一個在輪軸上方,由三根線束連接。遺憾的是,在拆卸外殼的過程中,我不知什么時候不慎將連接這個微型PCB和線束之間的連接器折斷了:

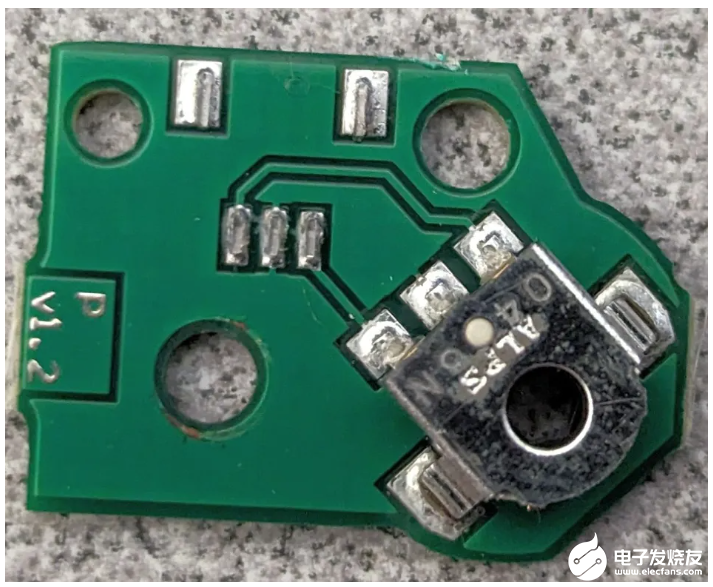
讓我們先回到下方較大的微型PCB,這里采用的主要芯片還是ST的另一款型號為STM32F030F4的MCU:

線束另一端的微型PCB隨即彈出:
看起來有點像馬達(實際上是Alps Alpine傳感器),對吧?不過這次是由手動驅動的輪軸(而不是以磁帶滾動條)提供動力。

因此,這種方法在概念上類似我們之前看到的另一種附件,只是在實現時有所變化。最后,我將展示張先前混淆的公母連接器照片:
(原文刊登于EDN美國版,由Susan Hong編譯)
-
激光測距儀
+關注
關注
2文章
94瀏覽量
15443 -
硬件設計
+關注
關注
18文章
424瀏覽量
45037 -
TOF
+關注
關注
9文章
494瀏覽量
37015 -
拆解
+關注
關注
82文章
607瀏覽量
115291 -
LIDAR
+關注
關注
10文章
339瀏覽量
30087
發布評論請先 登錄
十種主流電機拆解全解析:內部結構大揭秘!
京朗仕特防爆激光測距儀激光安全等級:I 類激光
位移傳感器與激光測距儀對比
BLE藍牙5.1模塊在高爾夫測距儀上的應用

基于XIAO的迷你激光數顯測距儀設計

HDDL-A電力電纜故障測距儀的使用教程

京朗仕特新一代的測量神奇——防爆激光測距儀YHJ-350J(A)

觸發器的內部結構是什么
激光測距儀如何改成速度計
YXC有源晶振,頻點50MHZ,超小體積2520封裝,應用于激光測距儀






 工商網監
工商網監

評論