") 高壓放大器在柔性爬行機(jī)器人驅(qū)動(dòng)性能研究中的應(yīng)用
高壓放大器在柔性爬行機(jī)器人驅(qū)動(dòng)性能研究中的應(yīng)用
實(shí)驗(yàn)名稱:柔性爬行機(jī)器人的材料測(cè)試
研究方向:介電彈性體的最小能量結(jié)構(gòu)是一種利用DE材料的電致變形與柔性框架形變相結(jié)合設(shè)計(jì)的新型柔性驅(qū)動(dòng)器,所謂最小能量是指驅(qū)動(dòng)器在平衡狀態(tài)時(shí)整個(gè)系統(tǒng)的能量最小,當(dāng)系統(tǒng)在外界的電壓刺激下就會(huì)產(chǎn)生對(duì)應(yīng)大小的形變,當(dāng)外界的電壓減小或者消失的時(shí)候,整體系統(tǒng)由于變量的移除從而變回最小能量狀態(tài)。其制作方法通常是將DE薄膜預(yù)拉伸之后固定在剛性框架上,然后將柔性框架裁剪后粘貼在薄膜的一側(cè)或兩側(cè),當(dāng)撤銷剛性框架后,在DE彈性回復(fù)力的作用下,外部的框架由簡(jiǎn)單的平面結(jié)構(gòu)變成受力復(fù)雜的馬鞍形,當(dāng)在DE薄膜上施加電壓時(shí),薄膜的麥克斯韋應(yīng)力在電應(yīng)力的作用下減小,馬鞍形的結(jié)構(gòu)就又會(huì)變成剛開(kāi)始的平面結(jié)構(gòu)。
實(shí)驗(yàn)?zāi)康模?/strong>為了減少傳統(tǒng)馬鞍形的最小能量體能量不足對(duì)驅(qū)動(dòng)器所造成的影響,提出了一種新型的DE驅(qū)動(dòng)器,該驅(qū)動(dòng)器由彈簧和加載電壓后可以產(chǎn)生純剪切形變的介電彈性體組成。正如所述,DE薄膜的純剪切形變可以實(shí)現(xiàn)在單一方向的往復(fù)驅(qū)動(dòng),并且有著比較高的驅(qū)動(dòng)應(yīng)變,所以DE薄膜的純剪切形變?cè)诮殡姀椥泽w驅(qū)動(dòng)器、雙向穩(wěn)定器和柔性驅(qū)動(dòng)機(jī)器人中有著廣泛的運(yùn)用。
測(cè)試設(shè)備:ATA-7050高壓放大器、介電彈性體材料、壓力傳感器、位移傳感器等。


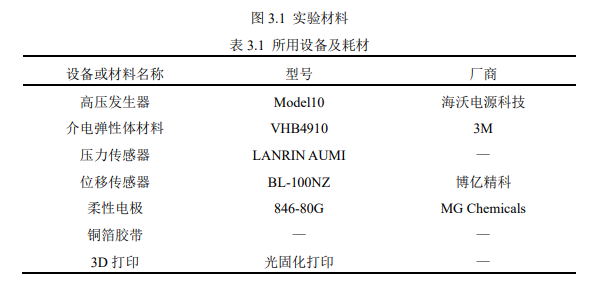
實(shí)驗(yàn)過(guò)程:在眾多的介電彈性體材料中,如圖3.1(a)所示,選擇丙烯酸膠帶為實(shí)驗(yàn)材料,該材料有著形變能力大、單位條件下的能量密度高、有著較高的介電常數(shù)等特點(diǎn)。并且因?yàn)樵摬牧蠟槿粘:牟模员容^容易獲得且價(jià)格適中。對(duì)于柔性電極,如圖3.1(b)所示,本文選擇了碳導(dǎo)電油脂846-80G作為制造材料。對(duì)于實(shí)驗(yàn)所需要的高壓,圖3-1(c)所示,使用了安泰電子科技有限公司的ATA-7050高壓電源,其電壓最大輸出為10KV,可以提供多種列如常波、三角波、正弦波、方波等多種信號(hào)。有著比較高的安全性。位移傳感器使用的是BL-100NZ激光位移傳感器,其精度為0.075mm。壓力傳感器為L(zhǎng)ANRINAUMI型,其測(cè)量精度為1g,量程為1kg。位移傳感器和壓力傳感器都可以通過(guò)數(shù)據(jù)線連接電腦里面的上位機(jī)并實(shí)時(shí)采集數(shù)據(jù)。其他耗材如表3.1所示。
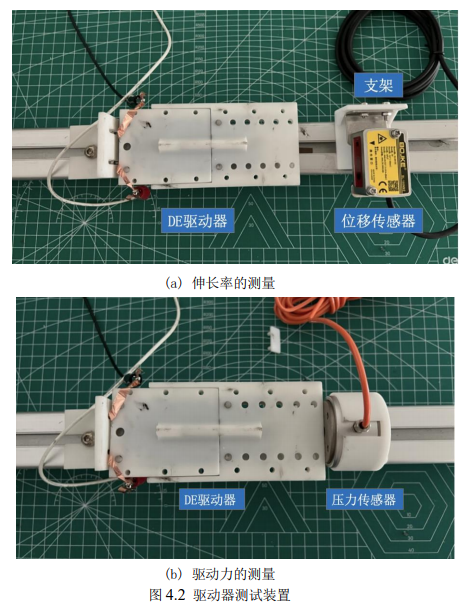
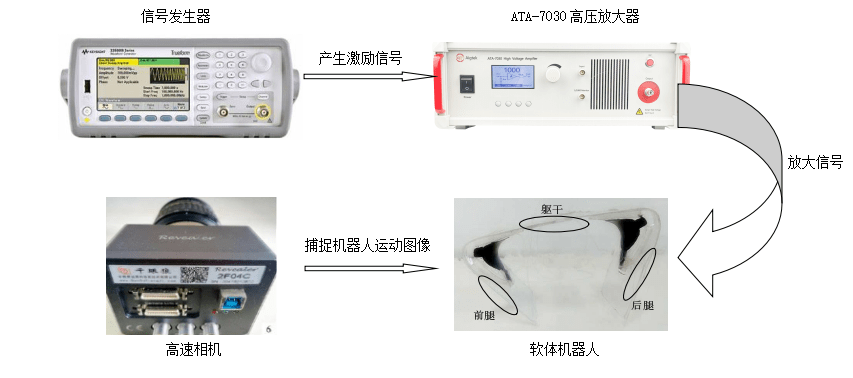
實(shí)驗(yàn)結(jié)果:如圖4.2(a)和4.2(b)所示是介電彈性體驅(qū)動(dòng)器的伸長(zhǎng)量和驅(qū)動(dòng)力測(cè)試的實(shí)物圖,在測(cè)量電壓的大小和DE驅(qū)動(dòng)器位移量的關(guān)系時(shí),可以先把驅(qū)動(dòng)器不用伸長(zhǎng)的一端固定在支架上,另一端懸空可以自由移動(dòng)。其具體的步驟如下:(1)在鋁型材支架的一端固定上驅(qū)動(dòng)器,另一端固定上激光位移傳感器,傳感器發(fā)射出的激光打在驅(qū)動(dòng)器一端的外殼上;(2)通過(guò)高壓發(fā)生器對(duì)DE驅(qū)動(dòng)器進(jìn)行電壓驅(qū)動(dòng);(3)隨著驅(qū)動(dòng)器接收的電壓不斷增大,驅(qū)動(dòng)器的一端也在不斷的伸長(zhǎng),直到驅(qū)動(dòng)器里面的介電彈性體薄膜被擊穿;(4)在驅(qū)動(dòng)器伸長(zhǎng)的過(guò)程中,位移傳感器不斷的記錄數(shù)據(jù)并上傳到電腦端的上位機(jī)中;(5)制作多個(gè)同一大小的驅(qū)動(dòng)器樣品進(jìn)行實(shí)驗(yàn),去的多組的測(cè)量數(shù)據(jù)后取平均值。在測(cè)量驅(qū)動(dòng)器的驅(qū)動(dòng)力時(shí),步驟與上述一致:(1)固定住驅(qū)動(dòng)器和壓力傳感器,保證驅(qū)動(dòng)器只有一端可以活動(dòng);(2)將DE驅(qū)動(dòng)器介入高壓發(fā)生器;(3)隨著電壓的不斷增大,壓力傳感器讀取示數(shù)后傳入電腦;(4)測(cè)量多個(gè)樣品并取其平均值。
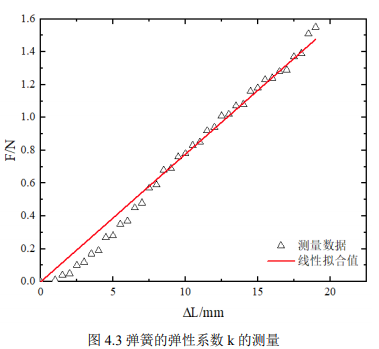
在進(jìn)行DE驅(qū)動(dòng)器的性能測(cè)試之前,本文首先進(jìn)了彈簧的彈力系數(shù)測(cè)試,彈簧初始為無(wú)加載狀態(tài),壓力傳感器在電機(jī)的推動(dòng)下對(duì)彈簧進(jìn)行擠壓。實(shí)驗(yàn)結(jié)果如圖4.3所示,因?yàn)閺椈稍谛巫兊倪^(guò)程中并不能一直保持垂直壓縮的狀態(tài)。可能會(huì)在彈力的作用下發(fā)生形變,所以結(jié)果并不是一條完美的直線。但是因?yàn)榘惭b在外殼上的彈簧有外殼的阻擋,因此可以保持單一方向的壓縮,并不會(huì)出現(xiàn)類似的情況。
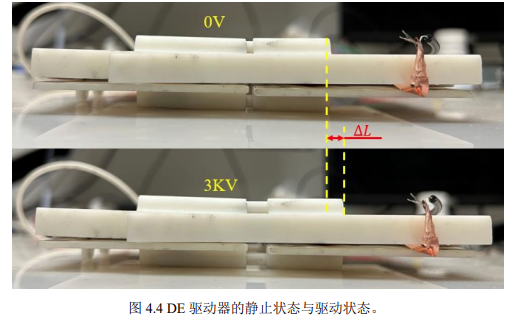
DE驅(qū)動(dòng)器通電后就會(huì)發(fā)生形變,如圖4.4所示,該圖為驅(qū)動(dòng)器在靜止?fàn)顟B(tài)和通入4kv電壓后的驅(qū)動(dòng)狀態(tài)的對(duì)比。驅(qū)動(dòng)狀態(tài)和靜止?fàn)顟B(tài)的長(zhǎng)度區(qū)別即為DE驅(qū)動(dòng)器的伸長(zhǎng)量ΔL。由于外殼上的彈簧存在,DE薄膜的恢復(fù)力與彈簧的彈力在驅(qū)動(dòng)方向上維持平衡,這時(shí)驅(qū)動(dòng)器處于靜止?fàn)顟B(tài)。當(dāng)在DE薄膜上施加大電壓時(shí),平衡狀態(tài)由于麥克斯韋應(yīng)力的產(chǎn)生而被打破,這時(shí)DE驅(qū)動(dòng)器就會(huì)發(fā)生位移,并會(huì)在新的位置達(dá)到平衡,此時(shí)驅(qū)動(dòng)器的狀態(tài)就被成為驅(qū)動(dòng)狀態(tài)。
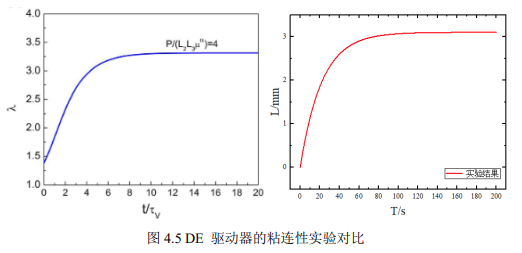
本文在測(cè)試驅(qū)動(dòng)器的靜態(tài)特性時(shí),保證電壓為4kv不變,然后選用200v/s的三角波作為DE驅(qū)動(dòng)器的驅(qū)動(dòng)信號(hào)。在實(shí)驗(yàn)中因?yàn)?00v/s三角波的壓縮量是比較小的,所以可以認(rèn)為DE薄膜在每個(gè)時(shí)刻都是相對(duì)靜態(tài)的,即發(fā)生器輸出的電壓相對(duì)不變的。如圖4.5所示為驅(qū)動(dòng)器的粘連性實(shí)驗(yàn),左圖為預(yù)測(cè)模型,右圖為實(shí)驗(yàn)結(jié)果,從對(duì)比圖可以看出實(shí)驗(yàn)結(jié)果是比較吻合的。
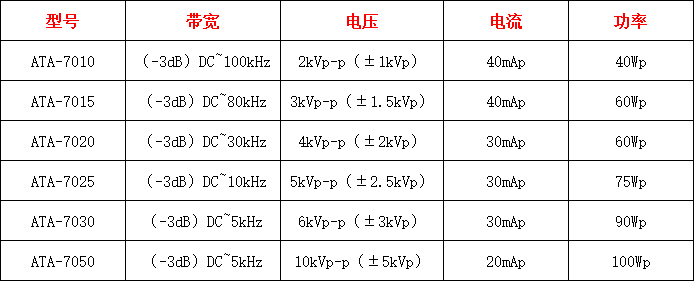
放大器推薦:ATA-7050
圖:ATA-7050高壓放大器指標(biāo)參數(shù)
本文實(shí)驗(yàn)素材由西安安泰電子整理發(fā)布,西安安泰電子科技有限公司(Aigtek)是國(guó)內(nèi)專業(yè)從事測(cè)量?jī)x器研發(fā)、生產(chǎn)和銷售的高科技企業(yè)。公司致力于功率放大器、功率信號(hào)源、功率放大模塊、計(jì)量校準(zhǔn)產(chǎn)品等產(chǎn)品為核心的相關(guān)行業(yè)測(cè)試解決方案的研究,為用戶提供具有競(jìng)爭(zhēng)力的測(cè)試方案,Aigtek已經(jīng)成為在業(yè)界擁有廣泛產(chǎn)品線,且具有相當(dāng)規(guī)模的儀器設(shè)備供應(yīng)商,樣機(jī)都支持免費(fèi)試用。
-
驅(qū)動(dòng)
+關(guān)注
關(guān)注
12文章
1838瀏覽量
85262 -
柔性
+關(guān)注
關(guān)注
0文章
71瀏覽量
14776 -
高壓放大器
+關(guān)注
關(guān)注
4文章
490瀏覽量
14358 -
四足爬行機(jī)器人
+關(guān)注
關(guān)注
1文章
3瀏覽量
1123
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
高壓放大器在介電彈性體折紙術(shù)軟體機(jī)器人中的應(yīng)用
功率放大器基于振動(dòng)驅(qū)動(dòng)的旋轉(zhuǎn)及攀爬軟體機(jī)器人的研究
功率放大器基于振動(dòng)驅(qū)動(dòng)的旋轉(zhuǎn)及攀爬軟體機(jī)器人的研究
回收發(fā)那科放大器,回收發(fā)那科機(jī)器人,回收發(fā)那科CPU
功率放大器在驅(qū)動(dòng)介電彈性體機(jī)器人的應(yīng)用
功率放大器在驅(qū)動(dòng)介電彈性體機(jī)器人的應(yīng)用

高壓放大器在柔性材料測(cè)試中的應(yīng)用
高壓放大器在科研實(shí)驗(yàn)教育中的應(yīng)用有哪些
高壓放大器在軟體機(jī)器人領(lǐng)域的應(yīng)用
Aigtek:介電彈性體高壓放大器在軟體機(jī)器人研究中的應(yīng)用

基于DOE的管道爬行機(jī)器人輕量化研究
Aigtek高壓放大器在柔性爬行機(jī)器人驅(qū)動(dòng)性能研究中的應(yīng)用

安泰ATA-7015高壓放大器在機(jī)器人測(cè)試中的應(yīng)用研究

ATA-7030高壓放大器在電致變形柔性致動(dòng)器表情機(jī)器人實(shí)驗(yàn)中的應(yīng)用

高壓放大器在軟體機(jī)器人特性測(cè)試中的應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論