 自動機器人運行的關鍵組件——松下3D激光雷達距離傳感器
自動機器人運行的關鍵組件——松下3D激光雷達距離傳感器
據麥姆斯咨詢報道,Panasonic(松下)近日宣布開發出了一款3D(三維)LiDAR(激光雷達)距離傳感器,它能夠廣視角精確測量周圍物體的距離和方向,是自動機器人運行的關鍵組件。該3D LiDAR采用了松下獨有的激光掃描技術,實現了垂直方向60度、水平方向270度的廣角掃描,為自動機器人的穩定運行提供了保障。松下將在2017年10月3~6日舉辦的日本高新技術博覽會(CEATEC JAPAN 2017)展示這款3D LiDAR。據麥姆斯咨詢介紹,這款廣視角3D LiDAR,能夠精確探測路面上的障礙物以及路面的起伏。此外,還可以通過調整系統中反射鏡的旋轉角度和速度,精確調整3D LiDAR的掃描角度和分辨率。因而用戶可以根據應用場景,精確而靈活的選擇合適的探測狀態。這將助推自動機器人在障礙物環繞、人來人往的室內外環境中的廣泛普及。這款廣視角3D LiDAR的產品特點:- 實現廣視角的三維距離和方向探測,垂直方向60度、水平方向270度;- 可進行垂直方向掃描角度、分辨率的任意設定;- 即使在強烈日照環境下也可進行高精度探測。
松下3D LiDAR的基本參數自動機器人要在障礙物環繞、人來人往的室內外環境中穩定運行,需要能夠探測周圍的地面環境以及障礙物情況。傳統的專為自動駕駛汽車設計的LiDAR無法在垂直方向進行大范圍掃描。因此,它們無法精確探測路面狀況。為此,傳統LiDAR需要結合其它傳感器才能探測路面狀況,使得自動運行機器人的架構和設計變得非常復雜。
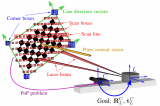
松下3D LiDAR激光掃描系統的結構圖廣視角:垂直方向60度、水平方向270度現有的LiDAR傳感器無法實現廣視角的周圍障礙物探測,尤其是垂直方向。松下開發的激光掃描技術,采用了其在大規模生產光碟驅動中開發積累的獨有的光學系統設計和反射鏡馬達控制技術。這款3D LiDAR采用了一個激光器和運動反射鏡來實現探測。反射鏡通過兩個驅動馬達,實現在兩個不同方向上的運動。單光路設計和反射鏡運動的廣角度,實現了垂直方向60度、水平方向270度的廣視場角。這款3D LiDAR不需要任何額外傳感器,便能探測周圍的障礙物及路面狀況,大大簡化了自動機器人的探測系統。垂直方向視角和分辨率的任意設定
松下3D LiDAR激光掃描案例自動機器人時常需要在特定的區域內運行,探測周圍的障礙物。例如,當它們在非常平坦且障礙物很少的區域運行時,它們不需要非常精確的探測路面的起伏或周圍的障礙物。障礙物探測傳感器,可以根據機器人的運行速度調節,進行相對高速的探測掃描。另一方面,當機器人在人來人往或障礙物較多的區域行駛時,它又需要廣視角的精確感知能力。此外,3D LiDAR還需要對被測障礙物的表面進行詳細探測。松下新開發的3D LiDAR得益于獨有的激光掃描技術,可以輕松的調整探測設置。根據機器人的運行環境,選擇最合適的探測設定,可以使機器人獲得最穩定、最高效的運行狀態。強日照下的精確探測在強烈的日照環境下,自動機器人也需要精確地探測障礙物。松下通過使反射光和發射光處于同一光路,成功地降低了由日照帶來的噪聲。使其新開發的3D LiDAR能夠在盛夏10萬勒克斯的照度下,也能實現精確探測。
強日照下的探測樣圖
-
松下
+關注
關注
14文章
26097瀏覽量
93428 -
激光雷達
+關注
關注
968文章
3967瀏覽量
189825 -
距離傳感器
+關注
關注
3文章
75瀏覽量
15121
原文標題:松下推出廣視角3D LiDAR傳感器
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
消費級激光雷達的起航
激光雷達除了可以激光測距外,還可以怎么應用?
5 款激光雷達:iDAR、高清3D LiDARInnovizPro、S3、SLAM on Chip、VLS-128
機器人產品傳感器越多,就越能有效避障?
讓機器人在陌生環境里穿梭自如的激光雷達
除了機器人行業,激光雷達還能應用于哪些領域?
機器人和激光雷達都不可或缺
16通道激光雷達傳感器Puck LITE問世
用于機器人避障的激光雷達避障傳感器安裝方式詳解
Velodyne的激光雷達傳感器獲表彰
3D激光雷達和相機校準是如何考慮傳感器之間誤差的?





 工商網監
工商網監
評論