

NVIDIA 在國際計(jì)算機(jī)視覺與模式識(shí)別會(huì)議(CVPR)上展示了用于自動(dòng)駕駛汽車開發(fā)的加速計(jì)算和生成式 AI 的突破技術(shù)。
NVIDIA 采取行動(dòng)加速自動(dòng)駕駛汽車的開發(fā),成為本周于美國西雅圖舉辦的國際計(jì)算機(jī)視覺與模式識(shí)別會(huì)議(CVPR)的自動(dòng)駕駛國際挑戰(zhàn)賽的獲勝者。
NVIDIA Research 繼去年獲得 3D Occupancy 預(yù)測冠軍后,今年又憑借 Hydra-MDP 模型在大規(guī)模端到端駕駛類別中擊敗了全球 400 多個(gè)參賽者,榮登榜首。
這一里程碑顯示了生成式 AI 在自動(dòng)駕駛汽車(AV)開發(fā)過程中構(gòu)建物理 AI 部署的重要性。該技術(shù)還可應(yīng)用于工業(yè)環(huán)境、醫(yī)療、機(jī)器人等其他領(lǐng)域。
NVIDIA 的獲獎(jiǎng)作品還榮獲 CVPR 創(chuàng)新獎(jiǎng),該獎(jiǎng)項(xiàng)是對(duì) NVIDIA 改進(jìn)“任意端到端駕駛模型使用所學(xué)習(xí)到的開環(huán)代理指標(biāo)”這一方法的認(rèn)可。
此外,NVIDIA 還發(fā)布了 NVIDIA Omniverse Cloud Sensor RTX,這是一套可實(shí)現(xiàn)物理精確傳感器仿真的微服務(wù),可加速各類完全自主機(jī)器的開發(fā)。
端到端駕駛?cè)绾芜\(yùn)作
比起短跑,自動(dòng)駕駛汽車開發(fā)競賽更像是一場永無止境的鐵人三項(xiàng)賽,涉及到三個(gè)截然不同但又至關(guān)重要的部分:AI 訓(xùn)練、仿真和自動(dòng)駕駛。每個(gè)部分都需要有各自的加速計(jì)算平臺(tái),并且專為這三個(gè)步驟打造的全棧系統(tǒng),需要組合成一個(gè)能夠保證開發(fā)周期不間斷并且性能與安全性也不斷提高的強(qiáng)大“鐵三角”。
為了實(shí)現(xiàn)這一目標(biāo),首先要在NVIDIA DGX等 AI 超級(jí)計(jì)算機(jī)上對(duì)模型進(jìn)行訓(xùn)練。然后,通過使用NVIDIA Omniverse平臺(tái)并在NVIDIA OVX系統(tǒng)上對(duì)模型進(jìn)行測試和驗(yàn)證。最后在NVIDIA DRIVE AGX平臺(tái)上通過該模型實(shí)時(shí)處理傳感器數(shù)據(jù)。
建立一個(gè)能夠在復(fù)雜物理世界中安全導(dǎo)航的自動(dòng)駕駛系統(tǒng)極具挑戰(zhàn)性。該系統(tǒng)需要全面感知和了解周圍環(huán)境,然后在幾分之一秒內(nèi)做出正確且安全的決策。因此,系統(tǒng)必須具備類似人類的態(tài)勢感知能力,才能處理潛在的危險(xiǎn)或罕見情況。
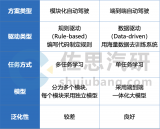
傳統(tǒng)的 AV 軟件開發(fā)一直基于模塊化方法,包括用于物體檢測和追蹤、軌跡預(yù)測以及路徑規(guī)劃和控制的獨(dú)立組件。
端到端自動(dòng)駕駛系統(tǒng)采用一個(gè)統(tǒng)一模型接收傳感器輸入并生成車輛軌跡,從而簡化了這一過程,有助于避免工作流變得過于復(fù)雜并提供了一種更加全面、以數(shù)據(jù)為依據(jù)的方法來處理現(xiàn)實(shí)世界中的各種情況。
引領(lǐng)國際挑戰(zhàn)賽
今年的 CVPR 挑戰(zhàn)賽要求參賽者利用 nuPlan 數(shù)據(jù)集開發(fā)出能夠根據(jù)傳感器數(shù)據(jù)生成駕駛軌跡的端到端自動(dòng)駕駛模型。
所提交的模型將在開源的 NAVSIM 模擬器中進(jìn)行測試,它的任務(wù)是在數(shù)千種從未體驗(yàn)過的場景中進(jìn)行導(dǎo)航。比賽根據(jù)安全性、乘客舒適度以及與原始記錄軌跡的偏差等指標(biāo)對(duì)模型性能進(jìn)行評(píng)分。
勝出的 NVIDIA Research 端到端模型能夠獲取攝像頭和激光雷達(dá)數(shù)據(jù)以及車輛的軌跡歷史記錄,在傳感器輸入后的五秒鐘內(nèi)就能生成安全的最佳車輛路徑。
NVIDIA 研究人員贏得此次比賽所使用的工作流可以通過 NVIDIA Omniverse 在高保真仿真環(huán)境中進(jìn)行復(fù)制,這意味著自動(dòng)駕駛仿真開發(fā)人員能夠在現(xiàn)實(shí)世界測試自動(dòng)駕駛汽車之前,先在物理精確的環(huán)境中創(chuàng)建工作流。NVIDIA Omniverse Cloud Sensor RTX微服務(wù)將于今年晚些時(shí)候推出。請注冊以獲得搶先體驗(yàn)https://developer.nvidia.com/login。
此外,NVIDIA 提交的作品在 CVPR 自動(dòng)駕駛大型挑戰(zhàn)賽語言駕駛類別中排名第二。NVIDIA 的模型打通了視覺語言模型和自動(dòng)駕駛系統(tǒng),通過整合大語言模型的強(qiáng)大功能幫助做出決策并實(shí)現(xiàn)可通用、可解釋的駕駛行為。
-
NVIDIA
+關(guān)注
關(guān)注
14文章
5167瀏覽量
105103 -
計(jì)算機(jī)視覺
+關(guān)注
關(guān)注
8文章
1703瀏覽量
46363 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14066瀏覽量
168309
原文標(biāo)題:CVPR 2024 | NVIDIA Research 獲 CVPR 自動(dòng)駕駛國際挑戰(zhàn)賽“端到端自動(dòng)駕駛”賽道冠軍
文章出處:【微信號(hào):NVIDIA-Enterprise,微信公眾號(hào):NVIDIA英偉達(dá)企業(yè)解決方案】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評(píng)論請先 登錄
相關(guān)推薦
東風(fēng)汽車推出端到端自動(dòng)駕駛開源數(shù)據(jù)集
NVIDIA Halos自動(dòng)駕駛汽車安全系統(tǒng)發(fā)布
動(dòng)量感知規(guī)劃的端到端自動(dòng)駕駛框架MomAD解析

DiffusionDrive首次在端到端自動(dòng)駕駛中引入擴(kuò)散模型

端到端自動(dòng)駕駛技術(shù)研究與分析
連接視覺語言大模型與端到端自動(dòng)駕駛

Waymo利用谷歌Gemini大模型,研發(fā)端到端自動(dòng)駕駛系統(tǒng)
Mobileye端到端自動(dòng)駕駛解決方案的深度解析

智駕進(jìn)程發(fā)力?小鵬、蔚來端到端模型上車
實(shí)現(xiàn)自動(dòng)駕駛,唯有端到端?

理想汽車加速自動(dòng)駕駛布局,成立“端到端”實(shí)體組織
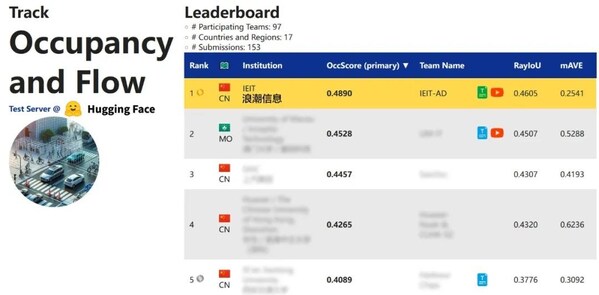
浪潮信息獲CVPR2024自動(dòng)駕駛挑戰(zhàn)賽"Occupancy& Flow"冠軍
智行者聯(lián)合清華完成國內(nèi)首套全棧式端到端自動(dòng)駕駛系統(tǒng)的開放道路測試

佐思汽研發(fā)布《2024年端到端自動(dòng)駕駛研究報(bào)告》
理想汽車自動(dòng)駕駛端到端模型實(shí)現(xiàn)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論