 高壓放大器在介電彈性體折紙術軟體機器人中的應用
高壓放大器在介電彈性體折紙術軟體機器人中的應用
實驗名稱:柔性驅動器的性能測試
研究方向:機器人的發展史已經超過了100年,機器人也逐漸從復雜笨重,功能單一的傳統機器人進化為更為智能、微型且高集成的多功能機器人。而隨著科技社會的進步,機器人被賦予了更多使命,但剛性機器人的高度發展無法滿足所有應用需求,脆弱的結構與笨重的體型使得它們的應用受到環境的限制。近年來軟體機器人的不斷發展使得這一劣勢足以彌補,為了滿足剛性機器人無法觸及的應用需求人們將研究的目光逐漸轉向軟體機器人。
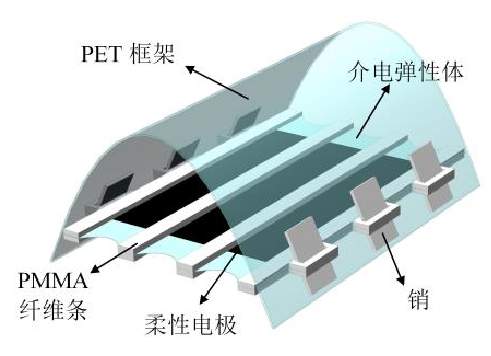
軟體機器人在機械和生物醫學工程領域正不斷凸顯其不可替代的優勢。它們不僅擁有柔軟的身體,還能夠根據復雜的物理場景調整身體形狀,甚至能以剛性機器人無法做到的運動方式通過非常狹窄的通道。由于身體的柔軟性,軟體機器人接觸尖銳的物體后還不會受到傷害,這一特性使得它們能夠進入人體進行藥物運輸,或者作為醫療手術中的操作員進行臨床手術。實際上,柔性驅動器已經作為操縱器被廣泛應用于大型機器人的開發中。在具體實踐時,為了提高軟體機器人在行走、醫療操縱和物體抓取等方面的可操作性,建造具有柔性和可變三維結構的軟體機器人至關重要。
實驗目的:測試軟體材料的性能,通過結構設計和工藝可實現獨立電子控制的折紙三維軟體機器人、爬行軟體機器人以及柔性抓取器等。
測試設備:所需的設備主要包括MC-3020激光切割機(銘創)、亞克力四向拉伸機構、高壓電源(Aigtek)、信號源、亞克力固定框等。
實驗過程:本實驗中需要使用激光切割機(圖2-6)制作柔性驅動器和折紙術機器人的PET柔性基板與加強筋,使用激光切割可實現高精度尺寸控制以及高效且平穩的樣品制作,通過USB連接電腦進行數據通訊并接收CAD結構圖,可方便切割各種形狀的基板。
本實驗柔性驅動器的制備流程中存在將介電彈性體薄膜四向拉伸的關鍵步驟,均勻拉伸彈性體薄膜所制作出的器件更具有可靠性。四向拉伸機構使用0.5mm厚的亞克力板材作為基底,通過設計CAD平面結構圖(圖2-7(a)所示)并導入USB信號通訊端口進行激光切割,最后制作出拉伸機構的基礎單元。
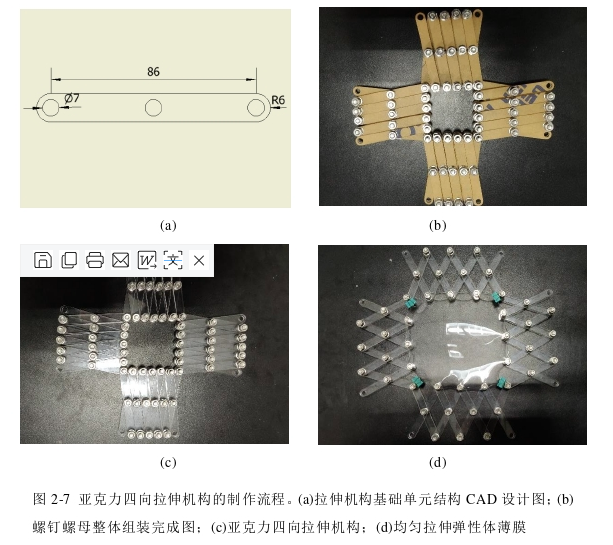
選用合適的螺絲和螺母(M6x20/M6x25)將切割好的亞克力基礎單元進行組裝,如圖2-7(b)所示。組裝后的四向拉伸機構可以實現彈性體薄膜的均勻拉伸,其拉伸效果如圖2-7(d)所示。
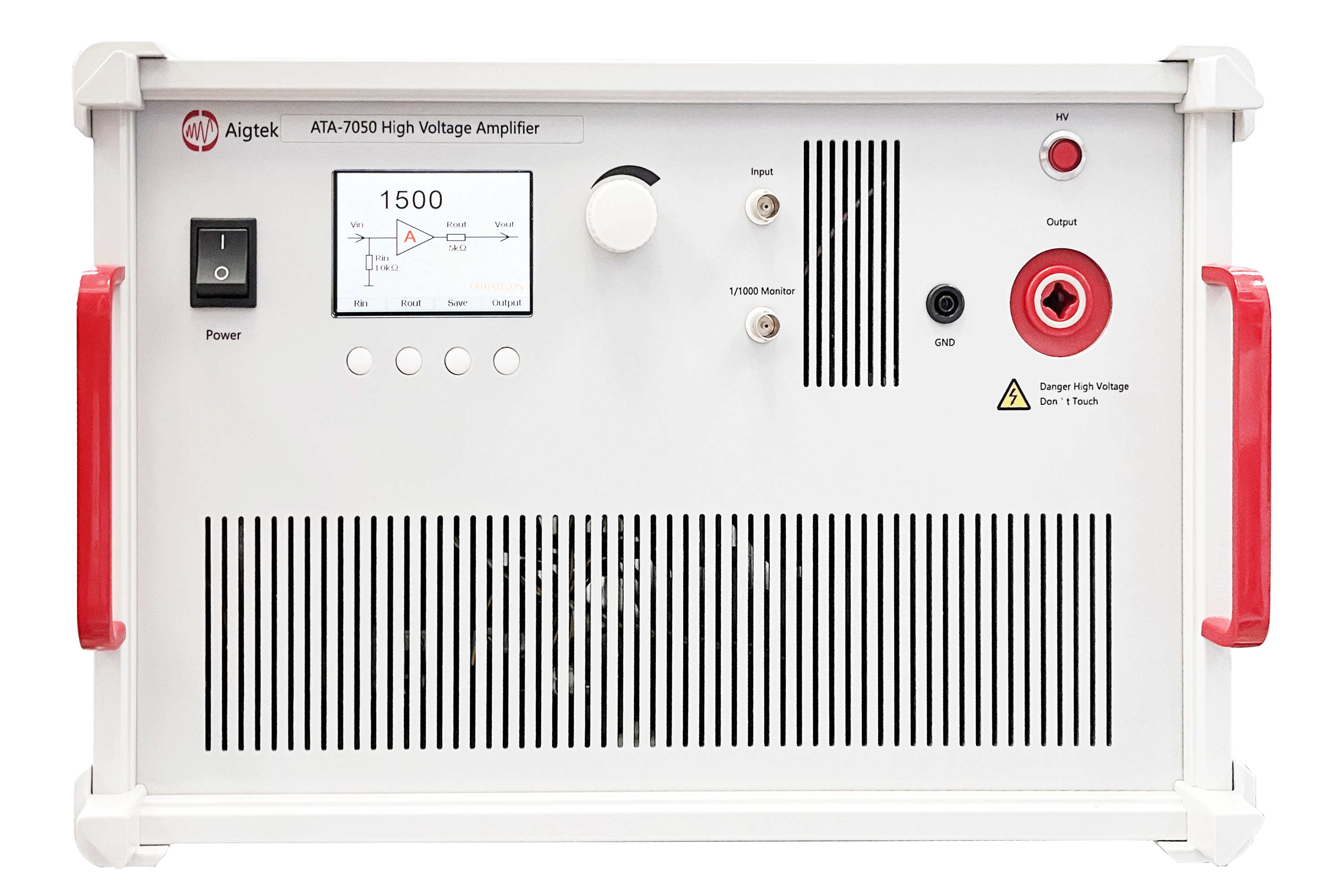
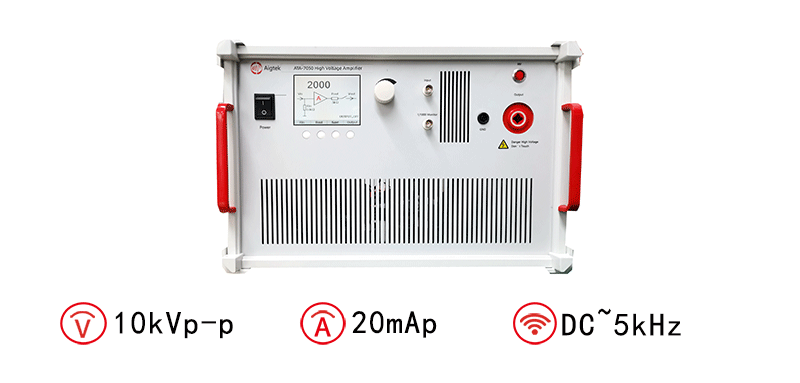
安泰高壓電源(圖2-8)是一款可高速穩定輸出電壓的直流電源,可精確控制輸出的電壓值。其輸出電壓范圍:±5kV,電壓精度為1V,輸出電流:20mA可以提供實驗中所需的高壓電。
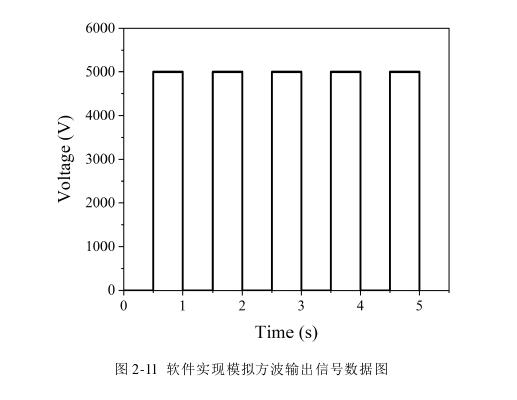
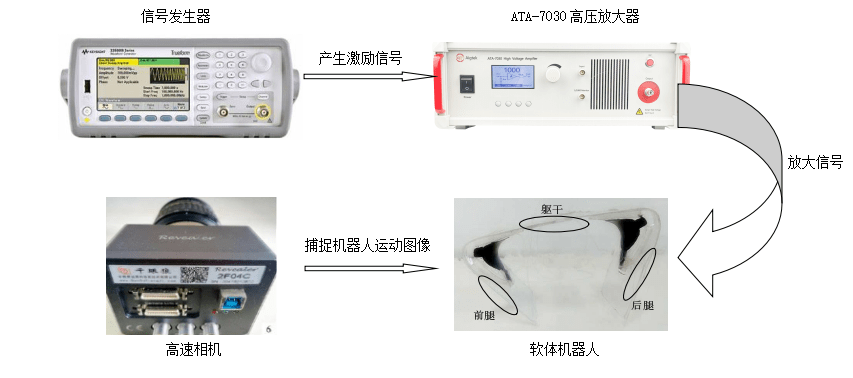
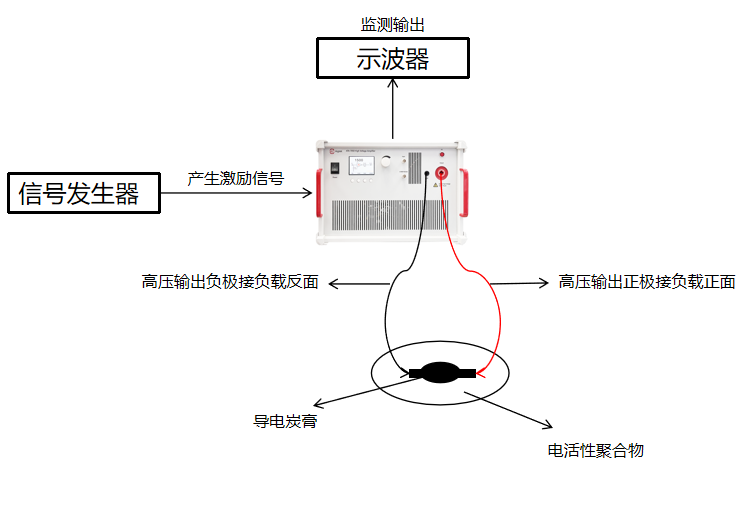
本實驗需要一臺可提供低頻方波信號輸出的信號源,根據需求,本實驗選擇了一臺是德科技的信號源,為高壓放大器提供一直方波的電壓信號,經過高壓放大器放大之后,輸出高電壓。
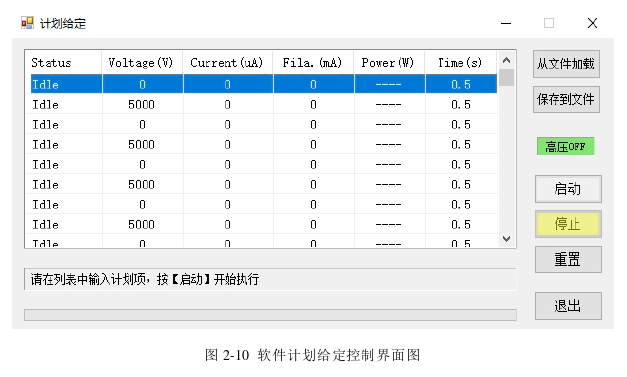
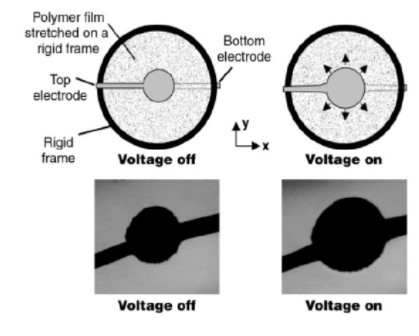
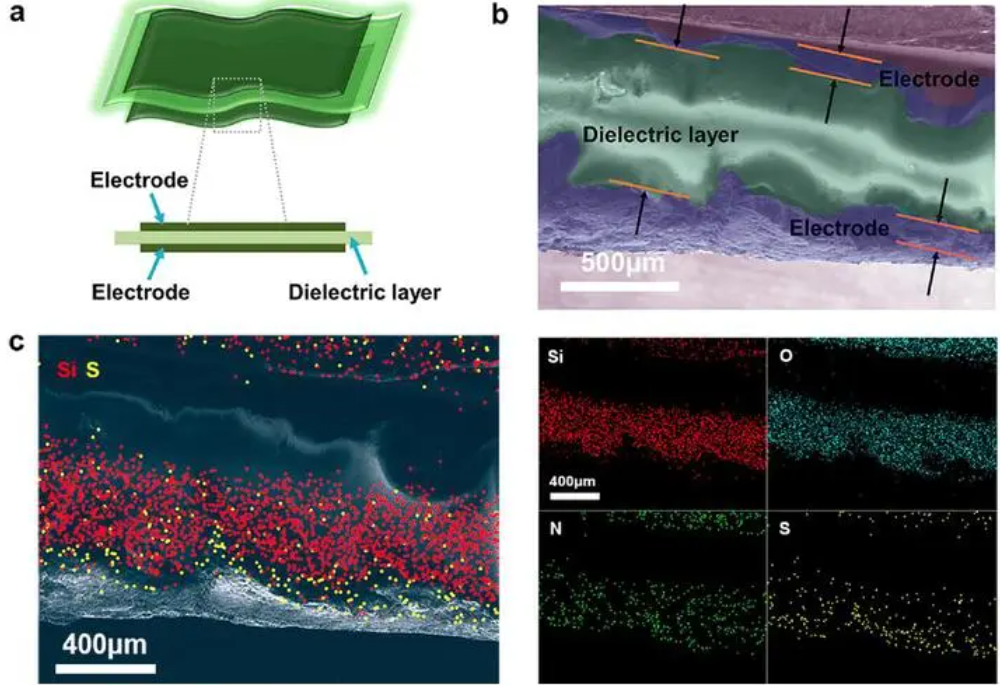
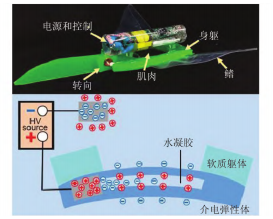
實驗結果:根據介電彈性體驅動器的驅動原理可知(隨著柔性電極兩端電壓的增大,相反電荷會在電極表面聚集,當聚集到一定程度時兩極表面形成的靜電力會相互吸引并擠壓中間的彈性體薄膜。由于彈性體體積不變的特性,這種壓力會使彈性體薄膜厚度減少且向四周擴張,進而將電能轉化為機械能并產生形變效果),介電彈性體產生驅動應變與輸出電源的電壓值(V)有關,而與電壓信號本身的方向無關,所以,即使不是交流電壓驅動也能使介電彈性體驅動器產生周期應變,然而受到串口通訊速度的限制,該設備的最高頻率僅為10HZ,電壓輸出范圍:0~5kV。
高壓放大器推薦:ATA-7050
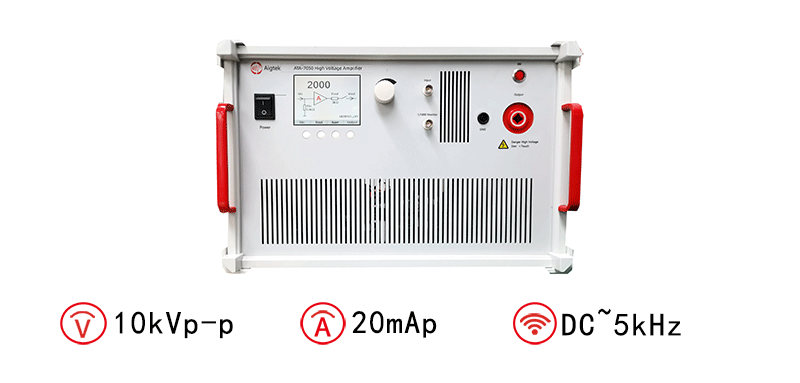
圖:ATA-7050高壓放大器指標參數
本文實驗素材由西安安泰電子整理發布,西安安泰電子科技有限公司(Aigtek)是國內專業從事測量儀器研發、生產和銷售的高科技企業。公司致力于功率放大器、功率信號源、功率放大模塊、計量校準產品等產品為核心的相關行業測試解決方案的研究,為用戶提供具有競爭力的測試方案,Aigtek已經成為在業界擁有廣泛產品線,且具有相當規模的儀器設備供應商,樣機都支持免費試用。
-
測試
+關注
關注
8文章
5269瀏覽量
126599 -
機器人
+關注
關注
211文章
28379瀏覽量
206912 -
高壓放大器
+關注
關注
4文章
490瀏覽量
14358
發布評論請先 登錄
相關推薦
高壓放大器基于介電彈性體最小能量結構設計應用
高壓放大器在介電彈性體材料研究中的應用
高壓放大器在介電彈性體驅動中有何應用呢?

高壓放大器在液晶彈性體中的應用研究

Aigtek:介電彈性體高壓放大器在軟體機器人研究中的應用

安泰ATA-7000系列高壓放大器在介電彈性體驅動實驗中的應用





 工商網監
工商網監
評論