 授人以漁,24電賽H題完賽資料開源,思想開源-(3)控制思想講解
授人以漁,24電賽H題完賽資料開源,思想開源-(3)控制思想講解
例程開源鏈接:https://pan.baidu.com/s/1PpacwWdcqvmT4xJEspaojw?pwd=6edb 提取碼:6edb
初始設定與啟動
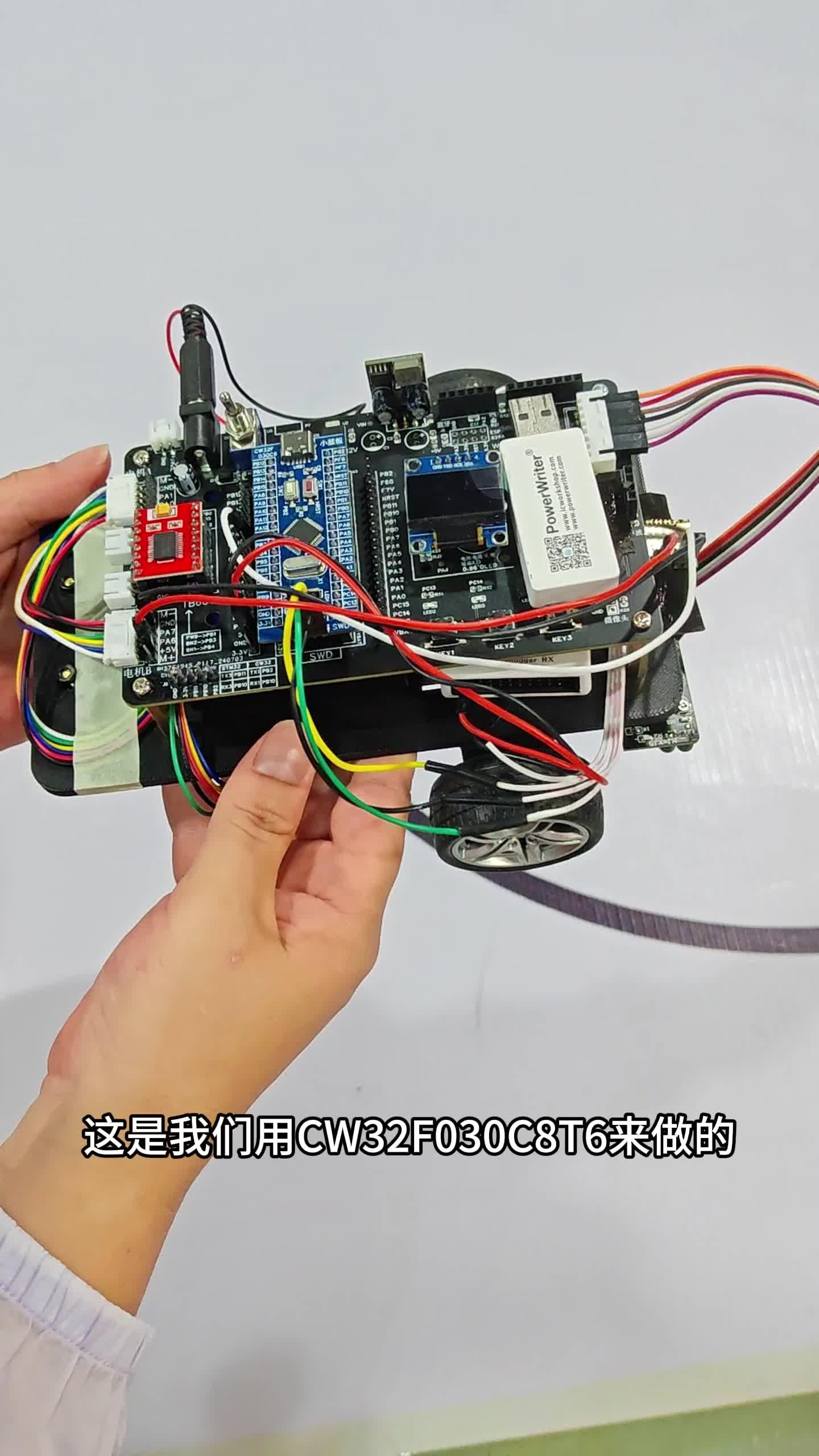
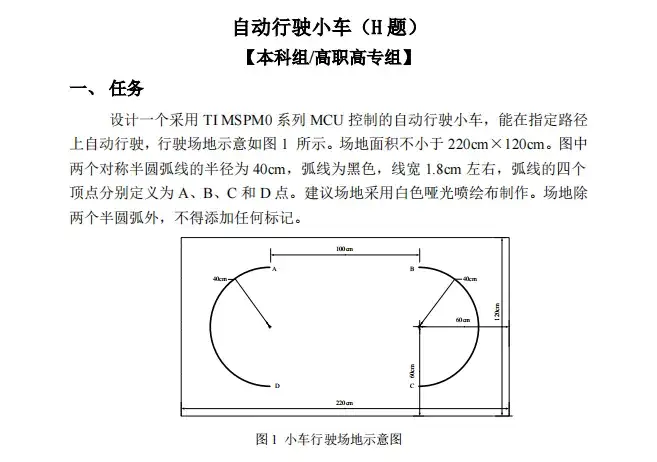
首先,我們啟動小車并觀察其運行情況。小車通過測量左右輪的路程差來進行方向調節。一旦找到尋跡的黑色線,即開始尋跡操作。我們使用了5個尋跡感應管來實現精確的尋跡功能。
尋跡過程
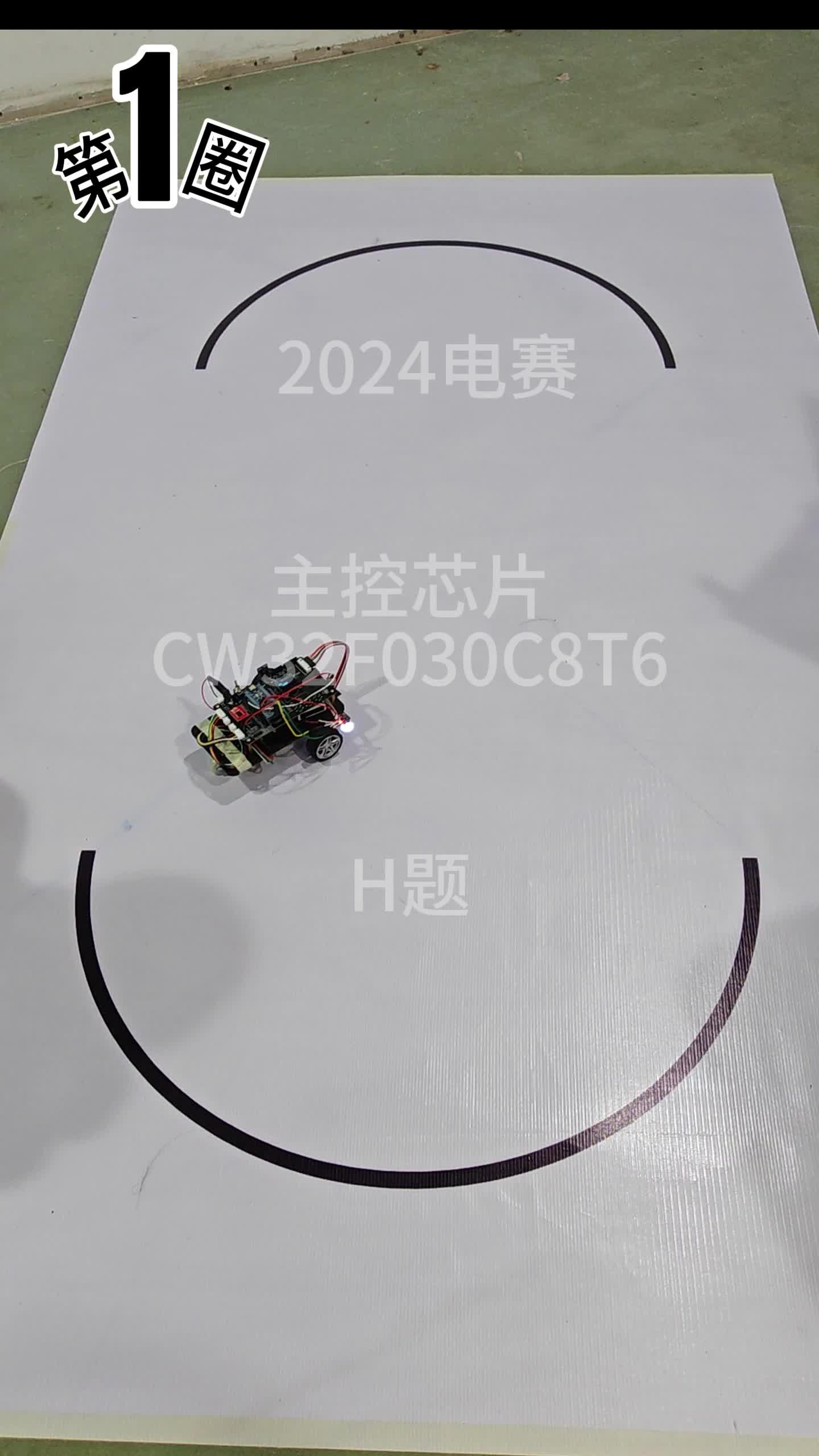
在第一圈中,我們可以看到小車迅速定位并開始尋跡。每一圈結束后,小車進行角度調整,通過調整左右輪的路程差來實現方向調節。尋跡過程中,小車沿著預設的角度前行,一旦再次檢測到黑色線,即刻重新開始尋跡操作。
控制策略概述
總體而言,我們的控制策略相對簡單明了:在空白區域通過左右輪的路程差進行實時方向調節,并在尋跡模塊檢測到線時立即切換到尋跡模式。在達到ABCD點后,我們先進行方向調整,將車輛轉向設定方向,然后執行路程差控制。
其中路程差進行方向調節實現代碼如下:
void task0(void)
{
IR_Check(); if(FLAG_ONir==1&&timecount>=300) //有傳感器了,聲光提示,停下
{
StartFlag=0;
setspeedr=0;setspeedl=0; // 停車
R_Pid_Ctrl(0,SPEED_RIGHT);
L_Pid_Ctrl(0,SPEED_LEFT); beeponflag=1;
}
else
{
setrightroad=5000;
setleftroad=5000;
if(Flag_PID>=1)
{ if(rightroad>leftroad+10)
{Flag_PID=0; Car_turnright(80,40);}
else if(leftroad>rightroad+10)
{Flag_PID=0; Car_turnright(40,80);}
else
{Flag_PID=0; Car_turnright(80,80);}
R_Pid_Ctrl(setspeedr,SPEED_RIGHT);
L_Pid_Ctrl(setspeedl,SPEED_LEFT); } }
}
車輛轉角實現代碼如下:(以下代碼為左輪速不動,右輪轉動調角度)
void ToangleR(unsigned int targetangl, unsigned int picha)
{
do
{
if(Flag_PID>=1)
{ Flag_PID=0; R_Pid_Ctrl(15,SPEED_RIGHT);
}
if(Flag_Encode == 1) //標志位檢測執行 10ms 實時速度顯示
{
Encode_Speed();Flag_Encode=0; }
}while(targetangl+picha
此外,左右輪速度的控制也至關重要。我們采用閉環電機速度控制,確保在尋跡過程中左右輪速度能夠精確控制,以提高運動穩定性和直線行駛效果。
PID速度閉環實現代碼如下:(以下代碼為左輪速度閉環控制代碼。)
void L_Pid_Ctrl(unsigned int Target,unsigned int Real) //PID速度控制函數
{
int Error=0; //本次差值,上次差值 float j=0.0,i;
if(Target==0)
{ LastError=0;
dError=0;
SumError=0;
outpwml=0;
ATIM_SetCompare2B(outpwml); return;
}
Error =(Target-Real); //本次偏差 if(SumError*L_Ki>1600) //計算積分項
{
SumError=1600;
SumError=SumError/L_Ki;
} // 輸出到最大值后,不再累計偏差,抗積分飽各
else SumError +=Error;
dError=Error-LastError; //微分項,偏差的變化
LastError=Error; //記錄本次偏差,用于下次計算
i=L_Kp;
j=Errori;
i=L_Ki;
* j=j+SumError*i;
i=L_Kd;
j=j+dError*i;
if(j>1600)outpwml=1600+1;
else if(j
調試過程中的挑戰
在實際調試過程中,我們遇到了幾個挑戰。首先是PID參數調節,這直接影響到小車的穩定性和精確性。其次是尋跡過程中的速度調整和轉向角度的精確控制,這些都需要仔細調整以保證最佳性能。
綜上所述,項目中涉及到多個參數,它們的合理調整直接影響小車的最終運行效果。我設定的是跑6圈,但實際上小車可以持續運行更多圈數,每一輪的積累反而會減小誤差,從而提高穩定性和準確性。
授人以漁,24電賽H題完賽資料開源,思想開源-(1)硬件講解21 播放 · 0 贊同視頻
?
授人以漁,24電賽H題完賽資料開源,思想開源-(2)軟件講解65 播放 · 0 贊同視頻
?
授人以漁,24電賽H題完賽資料開源,思想開源-(3)控制思想講解29 播放 · 0 贊同視頻
審核編輯 黃宇
-
開源
+關注
關注
3文章
3309瀏覽量
42471 -
控制策略
+關注
關注
0文章
24瀏覽量
8948 -
尋跡
+關注
關注
0文章
6瀏覽量
12614 -
CW32
+關注
關注
1文章
203瀏覽量
626
發布評論請先 登錄
相關推薦
授人以漁,24電賽H題完賽資料開源,思想開源-(2)軟件講解
2015 年全國電賽題——風力擺控制系統(B 題)精選資料分享

潤和軟件承辦2023開放原子開源大賽OpenHarmony創新賽金融行業賽題

18萬獎金!開放原子開源大賽OpenCloudOS賽題征集開啟

授人以漁,24電賽H題完賽資料開源,思想開源-(1)硬件講解





 工商網監
工商網監
評論