") 帶你走進(jìn)智能駕駛數(shù)據(jù)回灌系統(tǒng)
帶你走進(jìn)智能駕駛數(shù)據(jù)回灌系統(tǒng)
概述
在當(dāng)前汽車系統(tǒng)測(cè)試中,隨著自動(dòng)駕駛(ADS)和高級(jí)駕駛輔助系統(tǒng)(ADAS)的快速發(fā)展,車輛軟件的復(fù)雜性不斷增加。為了應(yīng)對(duì)上述場(chǎng)景測(cè)試中的復(fù)雜性,經(jīng)緯恒潤研發(fā)了OrienLink數(shù)據(jù)回灌模塊(包括開環(huán)和閉環(huán)回灌),顯著提升了SiL和HiL測(cè)試可靠性和有效性,特別是在早期研發(fā)階段和冒煙測(cè)試階段。本文重點(diǎn)介紹了目標(biāo)級(jí)開環(huán)回灌、閉環(huán)回灌和傳感器級(jí)別開環(huán)回灌的應(yīng)用,以及感知閉環(huán)回灌的發(fā)展。
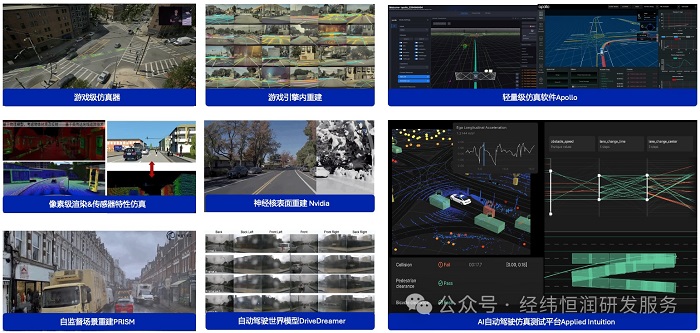
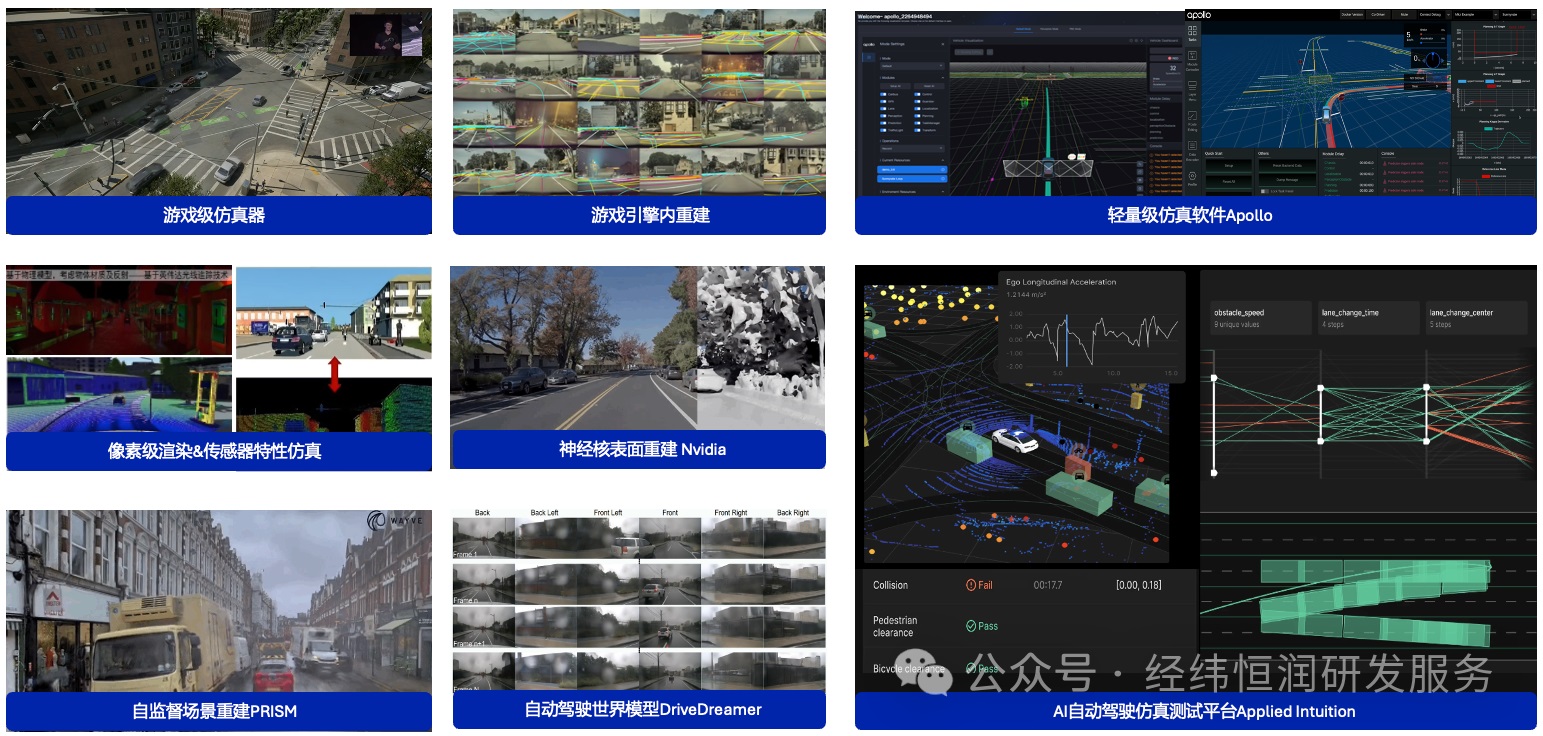
圖1 仿真測(cè)試系統(tǒng)概覽
SiL/HiL測(cè)試痛點(diǎn)及OrienLink數(shù)據(jù)回灌系統(tǒng)介紹
盡管SiL/HiL測(cè)試具備諸多優(yōu)勢(shì),但由于依賴仿真數(shù)據(jù),確保這些數(shù)據(jù)的真實(shí)性和準(zhǔn)確性成為一項(xiàng)關(guān)鍵挑戰(zhàn)。仿真系統(tǒng)需要對(duì)車輛動(dòng)力學(xué)、傳感器輸入和環(huán)境條件等大量基礎(chǔ)數(shù)據(jù)進(jìn)行模擬。然而,仿真與現(xiàn)實(shí)世界之間仍然存在顯著的差距,這種差距可能影響SiL/HiL測(cè)試的可靠性,使得評(píng)估結(jié)果難以準(zhǔn)確反映系統(tǒng)的真實(shí)狀態(tài)。
為了彌補(bǔ)SiL/HiL測(cè)試中的不足,開發(fā)團(tuán)隊(duì)通常還會(huì)結(jié)合實(shí)車隨機(jī)測(cè)試和場(chǎng)地測(cè)試進(jìn)行驗(yàn)證。這些測(cè)試方法在真實(shí)環(huán)境中運(yùn)行,能夠提供更精確的結(jié)果。然而,由于這些測(cè)試方法往往耗時(shí)且成本高昂,在早期開發(fā)階段和后期冒煙測(cè)試階段的應(yīng)用受到限制。
為了解決上述問題,我們?cè)谄囓浖y(cè)試中引入了基于數(shù)據(jù)的開環(huán)/閉環(huán)回灌測(cè)試系統(tǒng)——OrienLink Data Replay Module。閉環(huán)回灌測(cè)試系統(tǒng)通過實(shí)時(shí)的真實(shí)數(shù)據(jù)反饋和狀態(tài)機(jī)模型優(yōu)化,能夠?qū)崿F(xiàn)車輛軟件設(shè)計(jì)、測(cè)試與驗(yàn)證的高效循環(huán)[2]。例如,在規(guī)控測(cè)試中,Reactive-Replay方法利用歷史障礙物級(jí)別的感知數(shù)據(jù)對(duì)系統(tǒng)進(jìn)行動(dòng)態(tài)調(diào)整和優(yōu)化。閉環(huán)仿真系統(tǒng)能夠在仿真過程中實(shí)時(shí)調(diào)整車輛和環(huán)境模型,確保仿真結(jié)果更接近實(shí)際情況。圖2展示了開環(huán)回灌結(jié)果與實(shí)際采集結(jié)果的對(duì)比分析報(bào)告,進(jìn)一步驗(yàn)證了該方法的有效性。
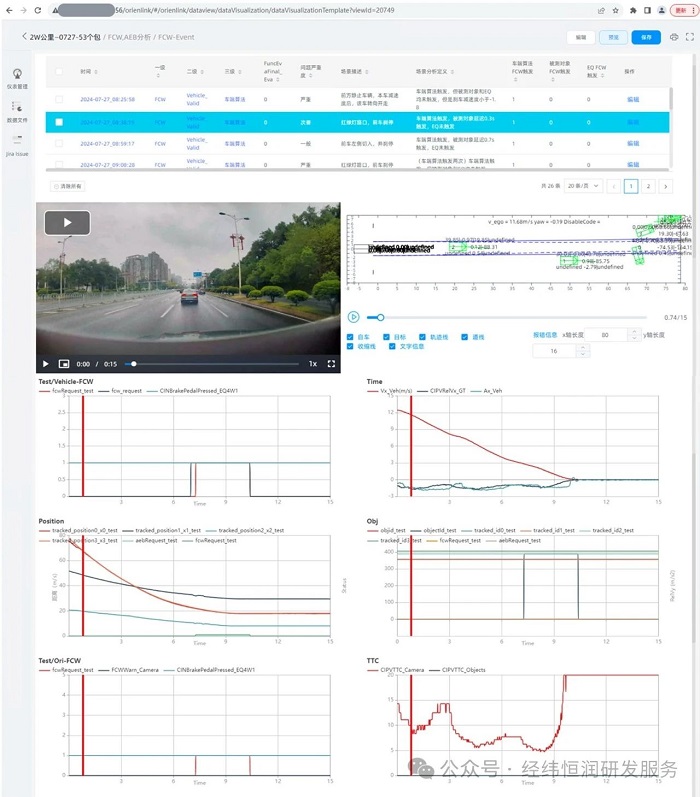
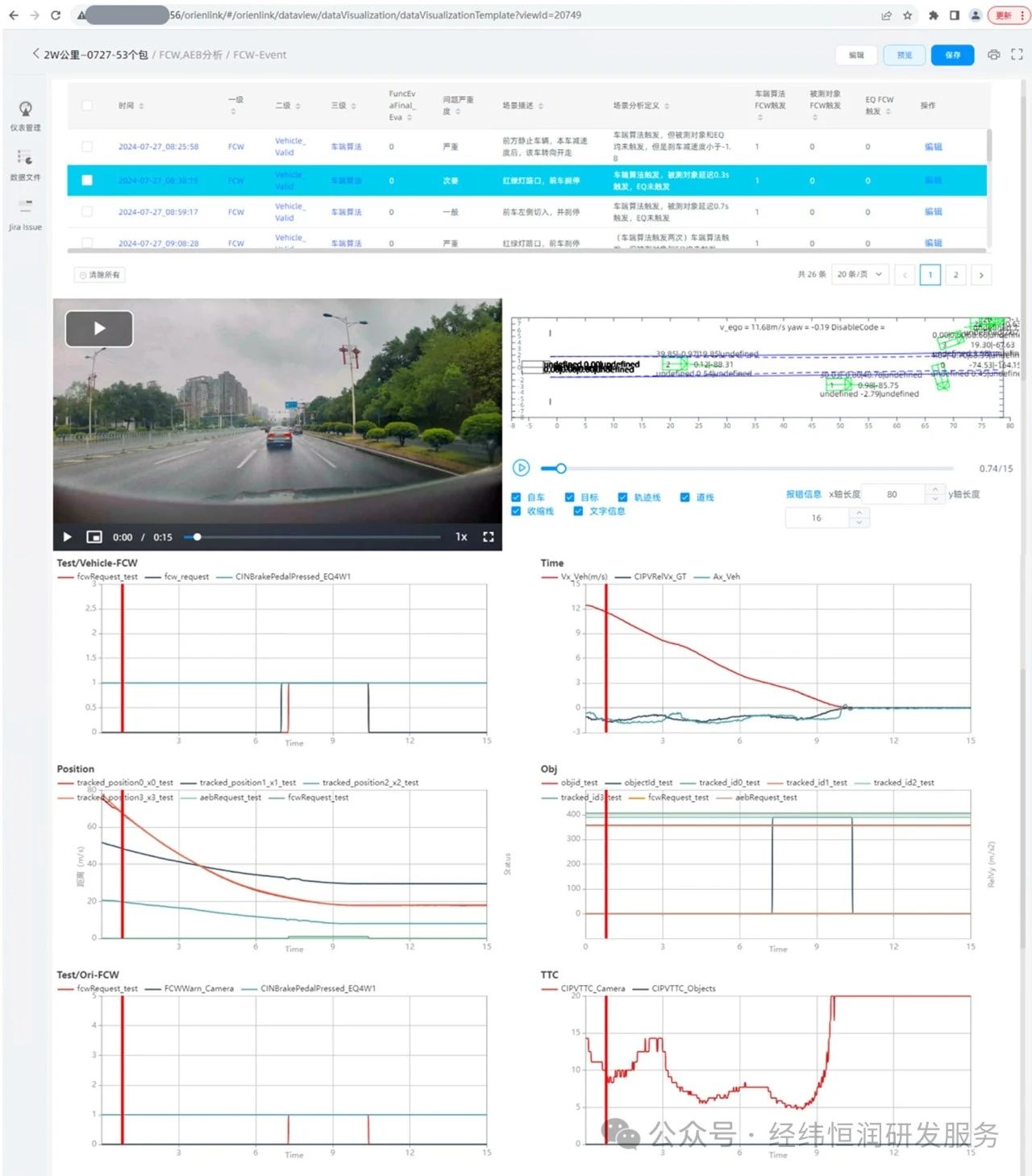
圖2 AEB/FCW開環(huán)回灌結(jié)果分析
數(shù)據(jù)回灌系統(tǒng)既可以用于SiL,基于云端的高算力,大存儲(chǔ)做并行仿真,也可以用于HiL測(cè)試,進(jìn)行更真實(shí)的半實(shí)物仿真。同時(shí),還可以用于多控制器系統(tǒng)聯(lián)合測(cè)試。其整體架構(gòu)如圖3所示。
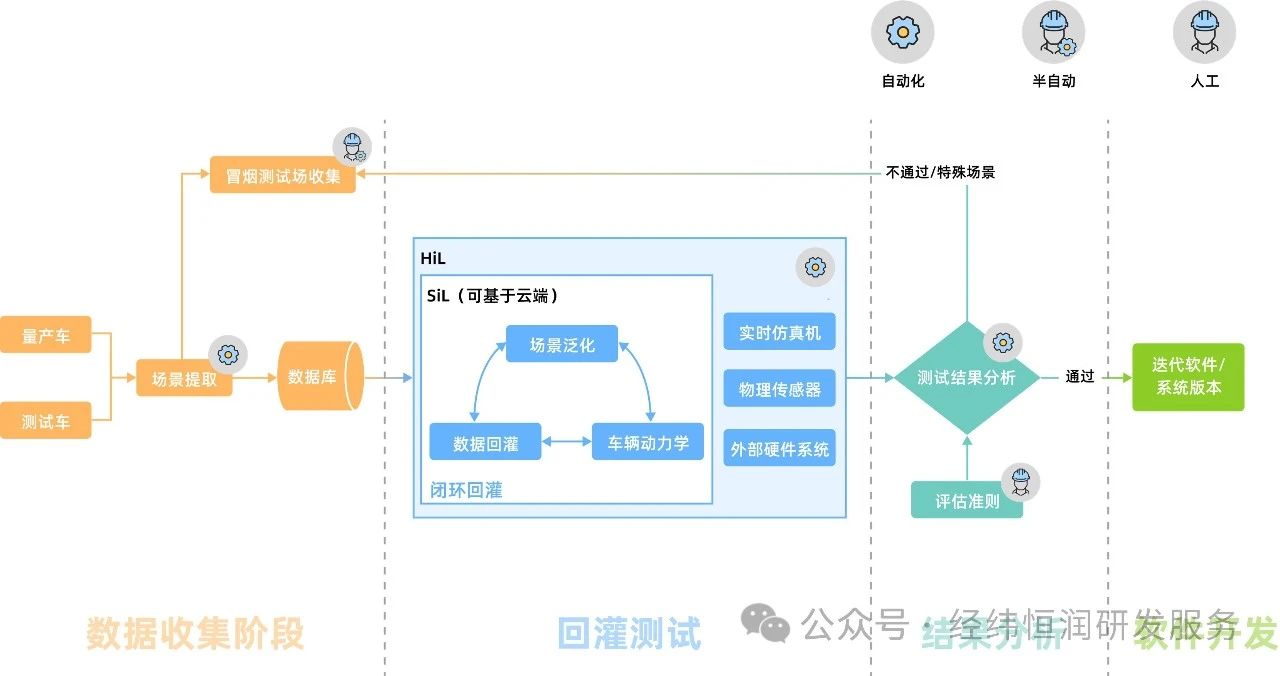
圖3 數(shù)據(jù)回灌整體架構(gòu)
OrienLink Data Replay Module的主要特征包括:
- 支持規(guī)控和感知的開環(huán)/閉環(huán)回灌:靈活處理不同類型的回灌驗(yàn)證,覆蓋關(guān)鍵系統(tǒng)。
- 支持場(chǎng)景泛化:通過約束隨機(jī)驗(yàn)證(CRV)技術(shù),擴(kuò)展測(cè)試場(chǎng)景,提升驗(yàn)證覆蓋度。
- 快速集成:能夠快速與HiL系統(tǒng)和云平臺(tái)SiL集成,高精度時(shí)鐘系統(tǒng)確保數(shù)據(jù)同步。
- 自動(dòng)化測(cè)試評(píng)估:內(nèi)置多年測(cè)試經(jīng)驗(yàn)和準(zhǔn)則,支持快速、自動(dòng)化的測(cè)試評(píng)估。
- 兼容多種傳感器和總線協(xié)議:適應(yīng)不同系統(tǒng)組件的測(cè)試需求。
- 支持全流程測(cè)試管理系統(tǒng)集成:與測(cè)試管理系統(tǒng)和DevOps集成,實(shí)現(xiàn)測(cè)試全過程的追溯和優(yōu)化。
感知閉環(huán)發(fā)展
基于AI智能體和視角合成技術(shù)(Novel View Synthesis)的感知閉環(huán)回灌系統(tǒng)代表了下一代仿真系統(tǒng)的發(fā)展方向。該系統(tǒng)通過加工真實(shí)傳感器采集的場(chǎng)景,并將其實(shí)時(shí)回灌至算法或控制器中,實(shí)現(xiàn)智能體與被測(cè)對(duì)象的實(shí)時(shí)交互閉環(huán)。與此同時(shí),系統(tǒng)還能泛化各種可能的場(chǎng)景,從而顯著提高測(cè)試驗(yàn)證的覆蓋度。
-
智能駕駛
+關(guān)注
關(guān)注
3文章
2541瀏覽量
48802 -
仿真測(cè)試
+關(guān)注
關(guān)注
0文章
90瀏覽量
11318 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13856瀏覽量
166590
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
標(biāo)貝數(shù)據(jù)標(biāo)注在智能駕駛訓(xùn)練中的落地案例

AI數(shù)據(jù)服務(wù)在智能駕駛訓(xùn)練中的應(yīng)用實(shí)例
智能駕駛用戶體驗(yàn)優(yōu)化建議
如何選擇智能駕駛輔助系統(tǒng)
智能駕駛系統(tǒng)的工作原理
應(yīng)用案例分享 | 智駕路試數(shù)據(jù)分析及 SiL/HiL 回灌案例介紹

FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
8路GMSL視頻注入回灌的自動(dòng)駕駛半實(shí)物仿真平臺(tái)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論