 串行外圍設備接口應用及設計詳解
串行外圍設備接口應用及設計詳解
1、 SPI簡介
SPI,是英語Serial Peripheral interface的縮寫,顧名思義就是串行外圍設備接口。是Motorola首先在其MC68HCXX系列處理器上定義的。SPI接口主要應用在 EEPROM,FLASH,實時時鐘,AD轉換器,還有數字信號處理器和數字信號解碼器之間。SPI,是一種高速的,全雙工,同步的通信總線,并且在芯片的管腳上只占用四根線,節約了芯片的管腳,同時為PCB的布局上節省空間,提供方便,正是出于這種簡單易用的特性,現在越來越多的芯片集成了這種通信協議。
2、 SPI特點
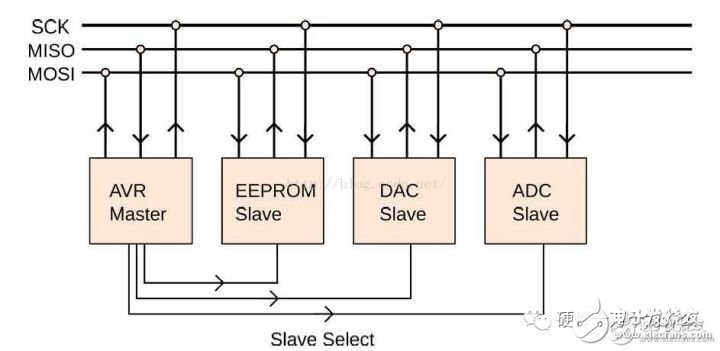
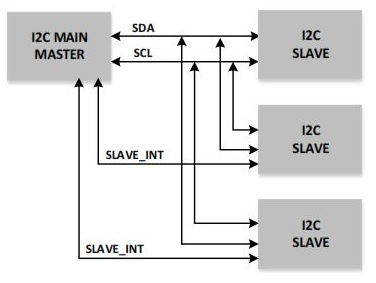
2.1采用主-從模式(Master-Slave) 的控制方式
SPI 規定了兩個 SPI 設備之間通信必須由主設備 (Master) 來控制次設備 (Slave). 一個 Master 設備可以通過提供 Clock 以及對 Slave 設備進行片選 (Slave Select) 來控制多個 Slave 設備, SPI 協議還規定 Slave 設備的 Clock 由 Master 設備通過 SCK 管腳提供給 Slave 設備, Slave 設備本身不能產生或控制 Clock, 沒有 Clock 則 Slave 設備不能正常工作
2.2采用同步方式(Synchronous)傳輸數據
Master 設備會根據將要交換的數據來產生相應的時鐘脈沖(Clock Pulse), 時鐘脈沖組成了時鐘信號(Clock Signal) , 時鐘信號通過時鐘極性 (CPOL) 和 時鐘相位 (CPHA) 控制著兩個 SPI 設備間何時數據交換以及何時對接收到的數據進行采樣, 來保證數據在兩個設備之間是同步傳輸的.
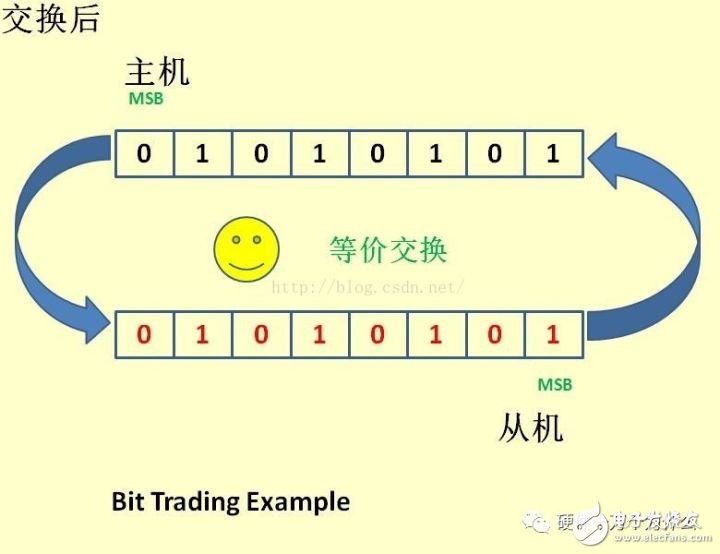
2.3數據交換(Data Exchanges)
SPI 設備間的數據傳輸之所以又被稱為數據交換, 是因為 SPI 協議規定一個 SPI 設備不能在數據通信過程中僅僅只充當一個 "發送者(Transmitter)" 或者 "接收者(Receiver)". 在每個 Clock 周期內, SPI 設備都會發送并接收一個 bit 大小的數據, 相當于該設備有一個 bit 大小的數據被交換了. 一個 Slave 設備要想能夠接收到 Master 發過來的控制信號, 必須在此之前能夠被 Master 設備進行訪問 (Access). 所以, Master 設備必須首先通過 SS/CS pin 對 Slave 設備進行片選, 把想要訪問的 Slave 設備選上. 在數據傳輸的過程中, 每次接收到的數據必須在下一次數據傳輸之前被采樣. 如果之前接收到的數據沒有被讀取, 那么這些已經接收完成的數據將有可能會被丟棄, 導致 SPI 物理模塊最終失效. 因此, 在程序中一般都會在 SPI 傳輸完數據后, 去讀取 SPI 設備里的數據, 即使這些數據(Dummy Data)在我們的程序里是無用的。
2.4 SPI有四種傳輸模式
上升沿、下降沿、前沿、后沿觸發。當然也有MSB和LSB傳輸方式.
2.5 SPI只有主模式和從模式之分。
沒有讀和寫的說法,因為實質上每次SPI是主從設備在交換數據。也就是說,你發一個數據必然會收到一個數據;你要收一個數據必須也要先發一個數據。
3、 工作機制
3.1概述
3.2 Timing
3.2.1 SPI相關的縮寫或說法
SPI的極性Polarity和相位Phase,最常見的寫法是CPOL和CPHA,不過也有一些其他寫法,簡單總結如下:(1) CKPOL (Clock Polarity) = CPOL = POL = Polarity = (時鐘)極性(2) CKPHA (Clock Phase) = CPHA = PHA = Phase = (時鐘)相位(3) SCK=SCLK=SPI的時鐘(4) Edge=邊沿,即時鐘電平變化的時刻,即上升沿(rising edge)或者下降沿(falling edge)對于一個時鐘周期內,有兩個edge,分別稱為:Leading edge=前一個邊沿=第一個邊沿,對于開始電壓是1,那么就是1變成0的時候,對于開始電壓是0,那么就是0變成1的時候;Trailing edge=后一個邊沿=第二個邊沿,對于開始電壓是1,那么就是0變成1的時候(即在第一次1變成0之后,才可能有后面的0變成1),對于開始電壓是0,那么就是1變成0的時候;
3.2.2 SPI的相位和極性
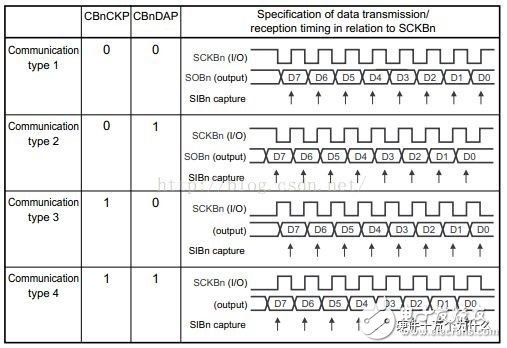
CPOL和CPHA,分別都可以是0或時1,對應的四種組合就是:Mode 0 CPOL=0, CPHA=0Mode 1 CPOL=0, CPHA=1Mode 2 CPOL=1, CPHA=0Mode 3 CPOL=1, CPHA=1
3.2.3 CPOL極性
先說什么是SCLK時鐘的空閑時刻,其就是當SCLK在數發送8個bit比特數據之前和之后的狀態,于此對應的,SCLK在發送數據的時候,就是正常的工作的時候,有效active的時刻了。先說英文,其精簡解釋為:Clock Polarity = IDLE state of SCK。再用中文詳解:SPI的CPOL,表示當SCLK空閑idle的時候,其電平的值是低電平0還是高電平1:CPOL=0,時鐘空閑idle時候的電平是低電平,所以當SCLK有效的時候,就是高電平,就是所謂的active-high;CPOL=1,時鐘空閑idle時候的電平是高電平,所以當SCLK有效的時候,就是低電平,就是所謂的active-low;
3.2.4 CPHA相位
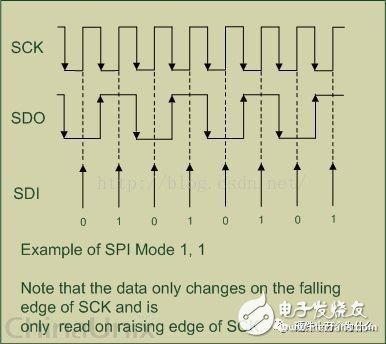
首先說明一點,capture strobe = latch = read = sample,都是表示數據采樣,數據有效的時刻。相位,對應著數據采樣是在第幾個邊沿(edge),是第一個邊沿還是第二個邊沿,0對應著第一個邊沿,1對應著第二個邊沿。對于:CPHA=0,表示第一個邊沿:對于CPOL=0,idle時候的是低電平,第一個邊沿就是從低變到高,所以是上升沿;對于CPOL=1,idle時候的是高電平,第一個邊沿就是從高變到低,所以是下降沿;CPHA=1,表示第二個邊沿:對于CPOL=0,idle時候的是低電平,第二個邊沿就是從高變到低,所以是下降沿;對于CPOL=1,idle時候的是高電平,第一個邊沿就是從低變到高,所以是上升沿;還是上圖大家更容易看懂
3.2.5 軟件中如何設置SPI的極性和相位
SPI分主設備和從設備,兩者通過SPI協議通訊。而設置SPI的模式,是從設備的模式,決定了主設備的模式。所以要先去搞懂從設備的SPI是何種模式,然后再將主設備的SPI的模式,設置和從設備相同的模式,即可正常通訊。對于從設備的SPI是什么模式,有兩種:
3.2.5.1固定的,有SPI從設備硬件決定的
SPI從設備,具體是什么模式,相關的datasheet中會有描述,需要自己去datasheet中找到相關的描述,即:關于SPI從設備,在空閑的時候,是高電平還是低電平,即決定了CPOL是0還是1;然后再找到關于設備是在上升沿還是下降沿去采樣數據,這樣就是,在定了CPOL的值的前提下,對應著可以推算出CPHA是0還是1了。
3.2.5.2 可配置的,由軟件自己設定
從設備也是一個SPI控制器,4種模式都支持,此時只要自己設置為某種模式即可。然后知道了從設備的模式后,再去將SPI主設備的模式,設置為和從設備模式一樣,即可。對于如何配置SPI的CPOL和CPHA的話,不多細說,多數都是直接去寫對應的SPI控制器中對應寄存器中的CPOL和CPHA那兩位,寫0或寫1即可。3.3 SSPSR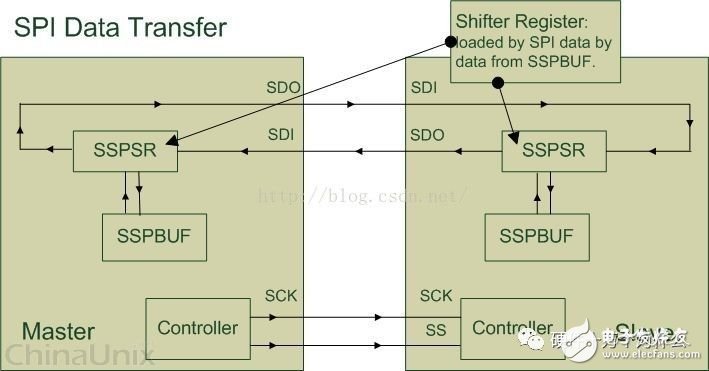
3.4 SSPBUF
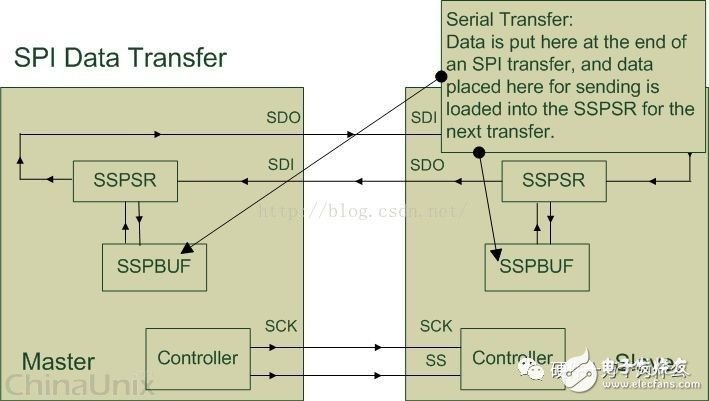
3.5 Controller
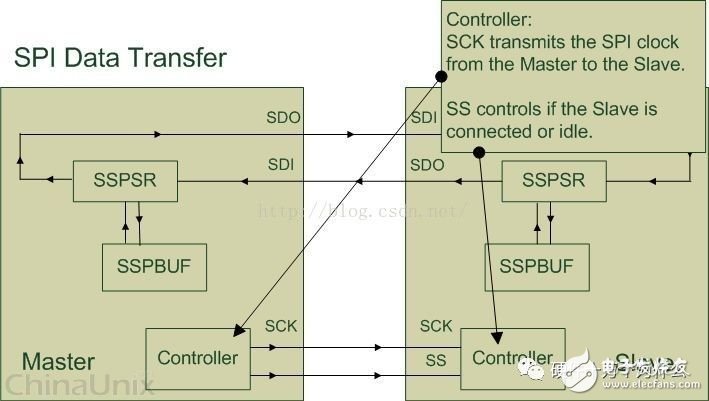
4. SPI舉例
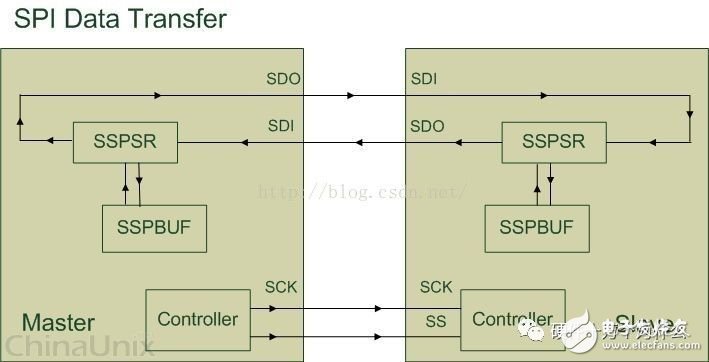
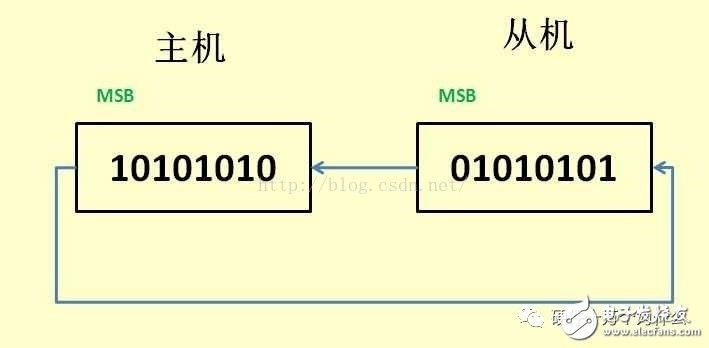
上面說了那么多,在這里我來舉一個例子幫助大家理解。SPI是一個環形總線結構,由ss(cs)、sck、sdi、sdo構成,其時序其實很簡單,主要是在sck的控制下,兩個雙向移位寄存器進行數據交換。假設下面的8位寄存器裝的是待發送的數據10101010,上升沿發送、下降沿接收、高位先發送。那么第一個上升沿來的時候 數據將會是sdo=1;寄存器=0101010x。下降沿到來的時候,sdi上的電平將所存到寄存器中去,那么這時寄存器=0101010sdi,這樣在 8個時鐘脈沖以后,兩個寄存器的內容互相交換一次。這樣就完成里一個spi時序。舉例:假設主機和從機初始化就緒:并且主機的sbuff=0xaa,從機的sbuff=0x55,下面將分步對spi的8個時鐘周期的數據情況演示一遍:假設上升沿發送數據

-
實時時鐘
+關注
關注
4文章
245瀏覽量
65773 -
總線
+關注
關注
10文章
2879瀏覽量
88058 -
時鐘信號
+關注
關注
4文章
448瀏覽量
28545
原文標題:SPI詳解
文章出處:【微信號:Hardware_10W,微信公眾號:硬件十萬個為什么】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
RS232接口通信協議詳解 如何測試RS232接口的性能
KeyStone架構串行外設接口(SPI)手冊
單片機語音芯片中的SPI Flash探秘及其分類詳解

PCIe數據傳輸協議詳解
串行接口PCB設計指南:優化布局與布線策略
SPI通信協議的基本概念和工作模式
串行接口與并行接口的區別
串行接口的工作原理和結構
使用GMSL隧穿對遠程汽車外設進行身份驗證

是否有可能使用CYSPP配置文件連接到外圍設備?
用PSOC6 BLE當外圍設備,兩者傳輸數據時,psoc6概率性出現藍牙掛死的原因?
什么是I2C接口?什么是I3C接口?I2C與I3C的區別





 工商網監
工商網監
評論