 一文讀懂車用雷達系統設計
一文讀懂車用雷達系統設計
車用雷達技術方興未艾。無論是于現階段之盲點偵測,抑或是發展中的自動駕駛控制,高性能、高可靠性、小巧兼低價,都是相輔相成的關鍵要素,更是促進其核心技術不斷發展與完善不可或缺的誘因與動機。
車用雷達是駕駛輔助系統的重要組成部份。其不僅提供駕駛人員舒適從而減少緊張感的駕駛環境,更為全面提高道路交通安全奠定必要的基礎。從設計車用雷達及其最佳化到大量生產,以及安裝除錯,都會使用到多種檢驗與量測方法。本文僅從射頻(RF)量測技術角度探討車用雷達的若干設計要點。
雷達波形的線性度
與其他的雷達技術相類似,車用雷達同樣藉由接收目標物體的反射訊號,并進一步分析接收訊號與原始發射訊號之間在時間、頻率以及相位上的多重相關性,從而判斷目標物體與雷達之間的相對速度與空間位置。
車用雷達的核心技術之一是雷達波形設計。線性頻率調變連續波(LFMCW,常簡稱為FMCW)是一種常用的雷達波形。發射訊號(亦即波形)的穩定度與線性度直接影響雷達對目標物體的辨識能力。由于車用雷達大多工作在毫米波頻段,所選用的各種材料及元件固有的非線性特性都會納入最終的發射訊號與接收訊號中,從而干擾訊號分析演算法。
車用雷達利用發射訊號與接收訊號之間相互關聯的頻率差與相位差,針對多個目標物體的速度與位置進行判斷。當整個雷達系統,特別是發射機部份的線性度出現非理想特性時,頻率差與相位差的計算結果將會產生模糊性,造成雷達系統無法正確判斷目標物體,以致于發生重大差錯。對于未來的自動駕駛控制技術來說,這是絕對要避免的。
為了最大程度地減少錯誤率,必須盡可能地提高發射訊號的線性度,并藉由量測確保產品之線性度的穩定性。基于訊號品質的嚴苛要求,線性度的量測大多采用高階的儀器設備,以降低量測誤差。目前的高階儀器都可以分析頻寬超過1-GHz的訊號,以確保完整量測雷達訊號。
車用雷達正迅速擴展,為輛提供更多駕駛輔助與更高安全性
在車用雷達應用中,無論是發射天線還是接收天線,通常都使用相控陣列。按照整體設計需要,可以采用線性陣列或是平面陣列。
眾所周知,陣列天線的主要參數(例如,主瓣方向及寬度、旁瓣抑制、零點位置等等)均可藉由簡單的數學公式進行計算。然而,這種計算結果的適用性是有條件的,亦即當陣列中任兩單元之間的相互耦合作用與影響極其微小至可以忽略不計的時候。有一種方法可使得上述的條件得以滿足,就是增加陣列單元之間的相對距離。不過,這種方法所帶來的影響是終端產品的尺寸也會隨加大。
如果無法藉由計算達到有效并準確地設計陣列單元的目的,量測就成為最佳化過程中的重要手段,再以相應的電腦軟體作為輔佐,以利于大數據(big data)運算。陣列天線的最佳化通常分為下面幾個步驟:
-
陣列基本單元的輻射場型設計
-
陣列單元之間相互耦合的評估
-
天線陣列的輻射場型設計
-
陣列饋電系統設計
-
雷達收發系統整合設計
-
車輛保險杠影響之考量
除此之外,雷達系統的整體設計方案也必須包含安全便利性的要求。而安全便利性又會直接或間接地影響到天線的設計,可謂「牽一發而動全身」。
在設計陣列基本單元時,尤其是在評估陣列單元之間的相互耦合過程中,因為相控天線通常都具有較大的陣列單元數量,使得完整、準確且快捷的量測成為最關鍵的因素。而要實現完整又準確的要求,多埠向量網路分析儀是必不可少的。
更進一步地考慮安全便利性的要求,車用雷達同一批產品的輻射場型穩定性至關重要。而要達到這一目標,輻射場型量測設備首先必須具備良好的量測結果之可重復性。這也是車用雷達量測技術的難點之一。
在一般情況下,天線輻射場型的量測必須在遠場(far field)進行。這里的遠場是一個相對的概念,按照目前業界常用的天線量測理論之定義,遠場與被量測之天線的尺寸以及該天線的工作頻率范圍相關。具體來說,某一天線之遠場與該天線的最大尺寸的平方成正比,而與該天線的工作波長成反比。
例如,某個車用雷達產品的最大尺寸是7.5cm,如果它的工作頻率處在24GHz,這時的遠場大約在0.9m以外。但是如果它工作在77GHz,其遠場將擴大到3m左右。在一般的量產條件下,這樣大的距離范圍幾乎無法實現。

77GHz車用雷達頻譜的雜訊級
為了克服上述遠場定義的局限性,可以選擇在近場(near field)進行數據采集,然后藉由近場與遠場的對應關系,將采集到的數據轉換成遠場的結果。雖然這種近場量測方法不再有距離范圍的限制,但是,為了確保量測結果的精準度,不僅量測設備會變得相當復雜,數據采集所需的時間也會成倍增加。此外,因為數據轉換需要額外的時間,使得整個量測過程變得十分冗長,以致于很難滿足量產效能的要求。
目前業界正在研究全新的方法,以最大程度地降低上述空間與時間的限制,從而在適當的距離范圍內,提高量產能力。
干擾
如同其他射頻產品,對于車用雷達也同樣存在干擾與抗干擾的問題。從目前的技術來看,單一輛車上的雷達數量有超過十顆的趨勢。所幸藉由天線的設計以及在安裝時的適當調整,可以減少單一輛車上各個雷達之間的相互干擾。然而,目前還沒有與車用雷達相關的設計技術標準,車用雷達所運作的頻率范圍更是無須申請許可證,因而對于不同車輛,特別是不同制造商的車輛,各車輛上雷達之間的相互干擾會是非常棘手的問題。
鑒于存在過多與干擾源相關的未知因素,在抗干擾能力的設計階段,從最壞處著眼,兼顧那些最初看起來發生機率不高的場景,以便正確評估雷達系統被干擾后做出難以預期的反應。
如前所述,車用雷達主要用來準確并快速地判斷目標物體與雷達之間的相對速度與空間位置。錯誤的判斷可分為兩大類:一類是「幻視」,即「無中生有」;另一類是「盲視」,即「視而不見」。無論誤判屬于哪一類,都與交通安全息息相關,對于未來的自動駕駛控制技術來說,這些都是絕對要避免的。如果相對距離足夠遠,就會有充份的時間對誤判進行修正。
因此,處于相對近距離時的誤判將是十分危險的。應該如何評估「相對近距離」?舉例來說,在城區內的道路上,通常的時速限制是60km/hr。以這樣的速度換算一下,15m至20m就會是「相對近距離」。因為一旦在這個距離內出現交通異常,雷達系統必須迅速并有效地啟動煞車系統,以便讓行進中的車輛在一秒甚至更短的時間內停下來。但問題是,在這個距離內雷達系統可能發生上述的「幻視」抑或「盲視」嗎?
答案是肯定的。也就是說,由于接收系統受到干擾,在特定的條件下(甚至包括天氣的影響),車用雷達系統對于目標物體反射回來的訊號之敏感度會急遽下降,原本百米以外的目標物體都可以分辨,而此時就連十米左右的目標物體都難以辨識。
為了確保車用雷達的抗干擾能力,標準化的量測方法是必要的。雖然目前尚無量測法規,業界還是可以參考其他類似的標準,先進行前期的可靠性量測,從而贏得時間提前量測,以便在正式的量測方法標準化之后,基于已有的數據,按照法規適當修正抗干擾余量,抑或提升抗干擾能力。
目前的抗干擾能力檢測方法主要藉由軟體設定場景,在電波暗室里,由訊號源產生特定的雷達波形作為干擾源,再由雷達目標模擬器模擬特定的目標物體,以此評估被測雷達在該特定場景中對于目標物體反射訊號之敏感度的下降程度,由此推算被測雷達在這一特定場景中對于特定干擾源的抗干擾能力。
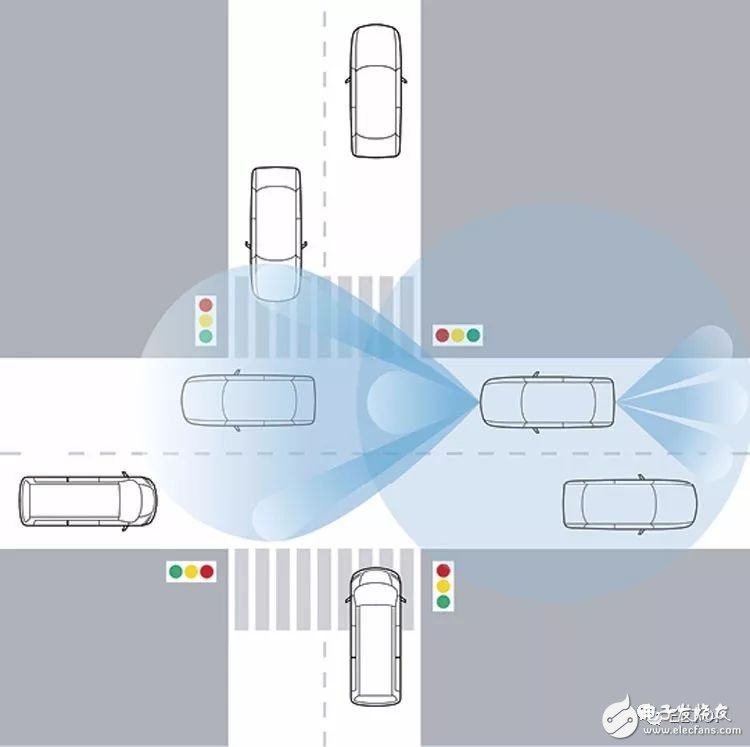
不同類型的車用雷達感測器共享有限的免授權頻譜,因而可能相互干擾
結語
綜上所述,由于涉及極其重要的交通安全因素,在自動駕駛控制技術真正成為人們日常生活的一部份之前,其中關鍵技術之一的雷達技術還有待進一步的發展與完善,例如,雷達波形線性度的穩定性、量產的技術瓶頸、多種場景中的抗干擾能力等等。而與此密切相關的車用雷達之射頻量測技術,已經為精準的測試以及未來更進階的量測需求奠定了必要的基礎。
-
車用雷達
+關注
關注
0文章
2瀏覽量
1422 -
車用雷達系統
+關注
關注
1文章
1瀏覽量
946 -
車用雷達設計
+關注
關注
0文章
1瀏覽量
763
原文標題:淺談車用雷達之量測
文章出處:【微信號:eetop-1,微信公眾號:EETOP】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
從射頻(RF)測量技術角度探討車用雷達的若干設計要點
車用雷達的設計要點有哪些










 工商網監
工商網監
評論