 步進電機定位精度的計算技巧
步進電機定位精度的計算技巧
由于開環控制系統具有操作方便,價格低廉的優點,所以我國所采用基本是以開環控制反應式步進電機為主。雖然步進電機應用廣泛,但其并不能如同普通的交(直)流電機在常規條件下使用,且從起點到終點的運行速度在理論狀況下,在電機的極限起動頻率大于運行的速度時,電機可按要求運行,并可達到預期的運行速度。
運行至行程結束時,也能立即發出可以實現停止功能的脈沖,并使電機停止運行。但實際情況是,步進電機能實現的極限起動預率較低,遠不能滿足較高的運行速度的要求。在這種工作狀況下,強行使電機以要求的速度(大于極限起動預率)直接起動,則會發生“丟步”或無響應。而當電機運行至終點時,雖然已經立即停止發脈沖,令其停止,但由于慣性作用,會發生沖過終點的現象,即產生過沖。
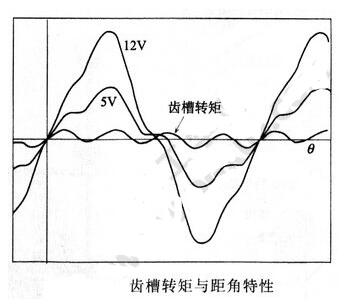
特別值得注意的是,為了既要保證系統的定位精度(電機的升降速緩慢,防止產生“失步”或“過沖”)又要獲得高的定位速度,主流系統都將定位過程劃分為粗定位階段和精定位階段進行。根據生產實踐經驗,“丟步”和“過沖”是步進電機在運行中最常出現的兩種嚴重影響步進電機定位精度的“罪魁”。
出現定位不準的主要原因包括:
(1)要求起動初速度過高,超過電機極限起動頻率,或者加速度太大,造成“丟步;
(2)電機馬達的功率達不到系統的要求;
(3)動器工作過程遭受千擾;
(4)控制系統的控制器產生誤動作;
(5)換向時丟脈沖,單向運行定位準確,換向后定位出現偏差,并雖換向次數的增加其偏差泉積就越明顯;
(6)軟件存在設計缺陷;
(7)使用同步帶的場合,軟件補償太多或太少。
-
步進電機
+關注
關注
150文章
3110瀏覽量
147458 -
定位精度
+關注
關注
0文章
7瀏覽量
7478 -
步進電機定位
+關注
關注
0文章
1瀏覽量
1264
原文標題:【技術文章】步進電機定位不準的原因分析
文章出處:【微信號:ChinaAET,微信公眾號:電子技術應用ChinaAET】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
一文知道步進電機位置定位精度的解決方法
無刷直流電機和步進電機區別
伺服電機和步進電機的精度和優缺點
步進電機位置定位精度解決方法

基于LabVIEW的閉環步進電機運動系統設計及精度分析





 工商網監
工商網監
評論