


光學指紋識別傳感器采用了國內著名指紋識別芯片公司杭州晟元芯片技術有限公司(Synochip) 的 AS608 指紋識別芯片。芯片內置 DSP 運算單元,集成了指紋識別算法,能高效快速采集 圖像并識別指紋特征。模塊配備了串口、USB 通訊接口,用戶無需研究復雜的圖像處理及及指紋識別算法,只需通過簡單的串口、USB 按照通訊協議便可控制模塊。本模塊可應用于各種考勤機、保險箱柜、指紋門禁系統、指紋鎖等場合。
01模塊來源
模塊實物展示:

資料下載鏈接:https://pan.baidu.com/s/1mCDdiU5nwtooxmHiPfYTFA
資料提取碼:kj8o
02 規格參數
工作電壓:3.0-3.6V
工作電流:30~60mA
指紋存容量:300 枚(ID:0~299)
認假率:<0.001%
搜索時間:<0.3(S)
控制方式:串口或USB
以上信息見廠家資料文件
03移植過程
我們的目標是將例程移植至CW32F030C8T6開發板上【實現添加指紋、刪除指紋和搜索指紋的功能】。首先要獲取資料,查看數據手冊應如何實現讀取數據,再移植至我們的工程。
3.1查看資料
系統內設有一個72K字節的圖像緩沖區與二個512bytes大小的特征文件緩沖區,名字分別稱為:lmageBuffer,CharBuffer1和CharBuffer2。用戶可以通過指令讀寫任意一個緩沖區。CharBufferl或 CharBuffer2既可以用于存放普通特征文件也可以用于存放模板特征文件。通過UART 口上傳或下載圖像時為了加快速度,只用到像素字節的高4位,即將兩個像素合成一個字節傳送。通過USB口則是整8位像素。
指紋庫容量根據掛接的FLASH容量不同而改變,系統會自動判別。指紋模板按照序號存放,序號定義為:0—(N-1)(N為指紋庫容量)。用戶只能根據序號訪問指紋庫內容。
這里我們使用的是串口控制方式,USB的接口我們可以懸空不接。
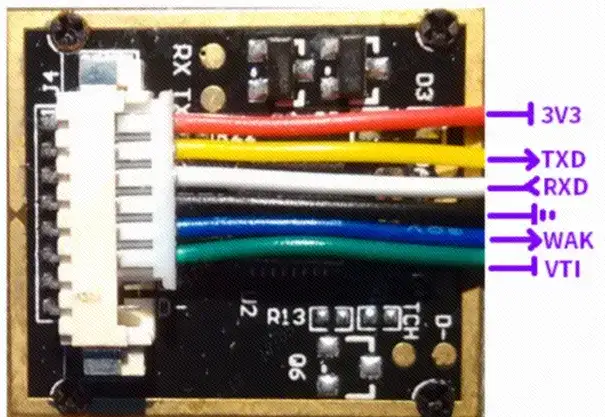
1腳(紅線):模塊主電源,接3.3V供電(請勿接3.3V以上電源,否則燒毀模塊!);
2腳(黃線):模塊串口TX(發送端),接MCU或TTL串口的RX(接收端);
3腳(白線):模塊串口RX(接收端),接MCU或TTL串口的TX(發送端);
4腳(黑線):模塊電源地,接3.3V電源地(負極);
5腳(藍線):模塊觸摸感應信號輸出(高電平為檢測到觸摸),需接VTI到3.3V。
6腳(綠線):模塊觸摸感應電路電源(3.3V),可以與1腳(紅線)并接。
7腳,8腳為USB信號線,使用串口控制模塊時可以懸空不用。
3.2引腳選擇
想要使用uart串口,需要確定使用的引腳是否有串口外設功能,可以通過用戶手冊進行查看。在用戶手冊的第146頁。
這里選擇使用PA2和PA3的附加串口2功能。
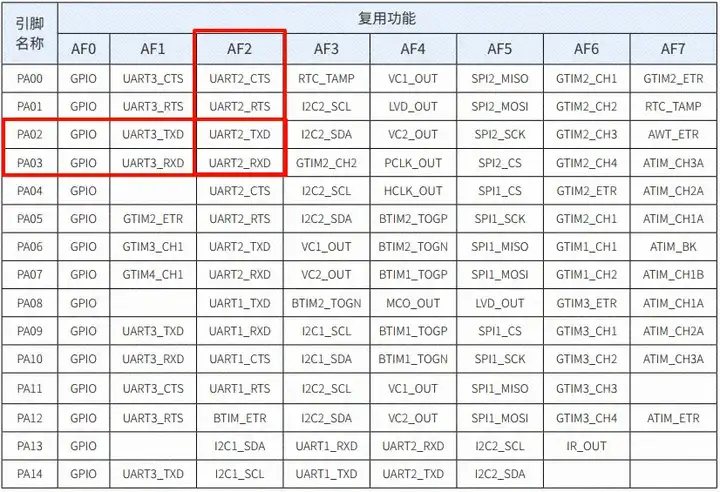
有串口功能的引腳
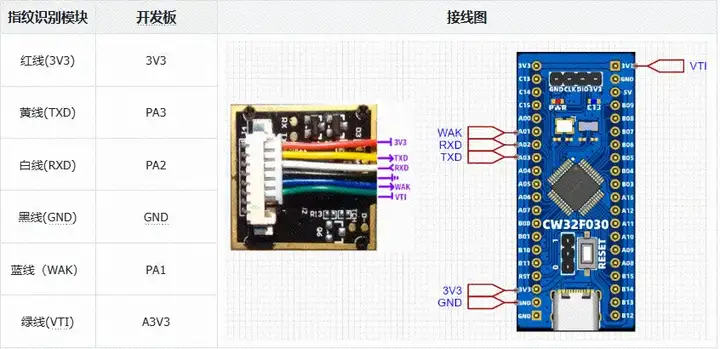
接線表
3.3移植至工程
移植步驟中的導入.c和.h文件與【CW32模塊使用】DHT11溫濕度傳感器相同,只是將.c和.h文件更改為bsp_as608.c與bsp_as608.h。這里不再過多講述,移植完成后面修改相關代碼。
將bsp_uart.c修改為下面的代碼:
/* * Change Logs: * Date Author Notes * 2024-06-12 LCKFB-LP first version */ #include "bsp_uart.h" #include "stdio.h" uint8_t u1_recv_buff[512]; // 接收緩沖區 uint16_t u1_recv_length; // 接收數據長度 uint8_t u1_recv_flag; // 接收完成標志位 /****************************************************************** * 函 數 名 稱:uart1_init * 函 數 說 明:初始化USART1的串口收發功能 * 函 數 形 參:__rate:波特率 * 函 數 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void uart1_init(uint32_t __rate) { //配置RCC RCC_AHBPeriphClk_Enable(DEBUG_USART_GPIO_CLK, ENABLE); // 使能GPIO時鐘 DEBUG_USART_APBClkENx(DEBUG_USART_CLK, ENABLE); // 使能串口時鐘 // 配置GPIO GPIO_InitTypeDef GPIO_InitStructure; //UART TX RX 復用 DEBUG_USART_AFTX; DEBUG_USART_AFRX; GPIO_InitStructure.Pins = DEBUG_USART_TX_GPIO_PIN; // 引腳 GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP; // 推挽輸出 GPIO_InitStructure.Speed = GPIO_SPEED_HIGH; // 輸出速度高 GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure); // 初始化GPIO GPIO_InitStructure.Pins = DEBUG_USART_RX_GPIO_PIN; GPIO_InitStructure.Mode = GPIO_MODE_INPUT_PULLUP; // 上拉輸入 GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure); // 配置UART USART_InitTypeDef USART_InitStructure; USART_InitStructure.USART_BaudRate = __rate; // 波特率 USART_InitStructure.USART_Over = USART_Over_16; // 配置USART的過采樣率。 USART_InitStructure.USART_Source = USART_Source_PCLK; // 設置時鐘源 USART_InitStructure.USART_UclkFreq = DEBUG_USART_UclkFreq; //設置USART時鐘頻率(和主頻一致即可) USART_InitStructure.USART_StartBit = USART_StartBit_FE; //RXD下降沿開始 USART_InitStructure.USART_StopBits = USART_StopBits_1; // 停止位1 USART_InitStructure.USART_Parity = USART_Parity_No ; // 不使用校驗 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 不使用流控 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 收發模式 USART_Init(DEBUG_USARTx, &USART_InitStructure); //優先級,無優先級分組 NVIC_SetPriority(DEBUG_USART_IRQ, 0); //UARTx中斷使能 NVIC_EnableIRQ(DEBUG_USART_IRQ); //使能UARTx RC中斷 USART_ITConfig(DEBUG_USARTx, USART_IT_RC, ENABLE); } #if !defined(__MICROLIB) //不使用微庫的話就需要添加下面的函數 #if (__ARMCLIB_VERSION <= 6000000) //如果編譯器是AC5 就定義下面這個結構體 struct __FILE { int handle; }; #endif FILE __stdout; //定義_sys_exit()以避免使用半主機模式 void _sys_exit(int x) { x = x; } #endif /* retarget the C library printf function to the USART */ int fputc(int ch, FILE *f) { // 發送一個字節 USART_SendData(DEBUG_USARTx, (uint8_t)ch); // 等待發送完成 while( RESET == USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_TXE) ){} return ch; } void uart1_receive_clear(void) { for(int i = 0; i < 512; i++) { u1_recv_buff[i] = 0; } u1_recv_length = 0; u1_recv_flag = 0; } /****************************************************************** * 函 數 名 稱:UART1_IRQHandler * 函 數 說 明:串口1中斷服務函數 * 函 數 形 參:無 * 函 數 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void UART1_IRQHandler(void) { uint8_t TxRxBuffer; if (USART_GetITStatus(CW_UART1, USART_IT_RC) != RESET) { // 接收一個字節 TxRxBuffer = USART_ReceiveData_8bit(CW_UART1); u1_recv_buff[u1_recv_length++] = TxRxBuffer; u1_recv_flag = 1; // USART_SendData_8bit(CW_UART1, TxRxBuffer); // 將數據發回用于驗證 // 清除標志位 USART_ClearITPendingBit(CW_UART1, USART_IT_RC); } }
將bsp_uart.h修改為下面的代碼:
/* * Change Logs: * Date Author Notes * 2024-06-12 LCKFB-LP first version */ #include "board.h" //UARTx #define DEBUG_USARTx CW_UART1 #define DEBUG_USART_CLK RCC_APB2_PERIPH_UART1 #define DEBUG_USART_APBClkENx RCC_APBPeriphClk_Enable2 #define DEBUG_USART_UclkFreq 64000000 //UARTx GPIO #define DEBUG_USART_GPIO_CLK RCC_AHB_PERIPH_GPIOA #define DEBUG_USART_TX_GPIO_PORT CW_GPIOA #define DEBUG_USART_TX_GPIO_PIN GPIO_PIN_8 #define DEBUG_USART_RX_GPIO_PORT CW_GPIOA #define DEBUG_USART_RX_GPIO_PIN GPIO_PIN_9 //GPIO AF #define DEBUG_USART_AFTX PA08_AFx_UART1TXD() #define DEBUG_USART_AFRX PA09_AFx_UART1RXD() //中斷 #define DEBUG_USART_IRQ UART1_IRQn extern uint8_t u1_recv_buff[512]; // 接收緩沖區 extern uint16_t u1_recv_length; // 接收數據長度 extern uint8_t u1_recv_flag; // 接收完成標志位 void uart1_receive_clear(void); void uart1_init(uint32_t __rate);
在文件bsp_as608.c中,編寫如下代碼。
/*
* Change Logs:
* Date Author Notes
* 2024-06-19 LCKFB-LP first version
*/
#include "bsp_as608.h"
#include "stdio.h"
#include "string.h"
#include "bsp_uart.h"
volatile unsigned char FPM10A_RECEICE_BUFFER[32];
unsigned int finger_id = 0;
const unsigned char FPM10A_Get_Device[10] ={0x01,0x00,0x07,0x13,0x00,0x00,0x00,0x00,0x00,0x1b};//口令驗證
const unsigned char FPM10A_Pack_Head[6] = {0xEF,0x01,0xFF,0xFF,0xFF,0xFF}; //協議包頭
const unsigned char FPM10A_Get_Img[6] = {0x01,0x00,0x03,0x01,0x00,0x05}; //獲得指紋圖像
const unsigned char FPM10A_Get_Templete_Count[6] ={0x01,0x00,0x03,0x1D,0x00,0x21 }; //獲得模版總數
const unsigned char FPM10A_Search[11]={0x01,0x00,0x08,0x04,0x01,0x00,0x00,0x03,0xE7,0x00,0xF8}; //搜索指紋搜索范圍0 - 999,使用BUFFER1中的特征碼搜索
const unsigned char FPM10A_Search_0_9[11]={0x01,0x00,0x08,0x04,0x01,0x00,0x00,0x00,0x13,0x00,0x21}; //搜索0-9號指紋
const unsigned char FPM10A_Img_To_Buffer1[7]={0x01,0x00,0x04,0x02,0x01,0x00,0x08}; //將圖像放入到BUFFER1
const unsigned char FPM10A_Img_To_Buffer2[7]={0x01,0x00,0x04,0x02,0x02,0x00,0x09}; //將圖像放入到BUFFER2
const unsigned char FPM10A_Reg_Model[6]={0x01,0x00,0x03,0x05,0x00,0x09}; //將BUFFER1跟BUFFER2合成特征模版
const unsigned char FPM10A_Delete_All_Model[6]={0x01,0x00,0x03,0x0d,0x00,0x11};//刪除指紋模塊里所有的模版
volatile unsigned char FPM10A_Save_Finger[9]={0x01,0x00,0x06,0x06,0x01,0x00,0x0B,0x00,0x19};//將BUFFER1中的特征碼存放到指定的位置
uint8_t u2_recv_buff[USART2_RECEIVE_LENGTH]; // 接收緩沖區
uint16_t u2_recv_length; // 接收數據長度
uint8_t u2_recv_flag; // 接收完成標志位
/******************************************************************
* 函 數 名 稱:as608_gpio_config
* 函 數 說 明:初始化as608引腳
* 函 數 形 參:設置波特率 as608的默認波特率是57600
* 函 數 返 回:無
* 作 者:LC
* 備 注:as608的默認波特率是57600
******************************************************************/
void as608_gpio_config(uint32_t band_rate)
{
GPIO_InitTypeDef GPIO_InitStruct; // GPIO初始化結構體
AS608_GPIO_RCC_ENABLE(); // 使能GPIO時鐘
AS608_UART_RCC_ENABLE(); // 使能UART時鐘
GPIO_InitStruct.Pins = AS608_TX_PIN; // GPIO引腳
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽輸出
GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; // 輸出速度高
GPIO_Init(AS608_GPIO_PORT, &GPIO_InitStruct); // 初始化
GPIO_InitStruct.Pins = AS608_RX_PIN; // GPIO引腳
GPIO_InitStruct.Mode = GPIO_MODE_INPUT_PULLUP; // 上拉輸入
GPIO_Init(AS608_GPIO_PORT, &GPIO_InitStruct); // 初始化
GPIO_InitStruct.Pins = AS608_TOUCH_PIN; // GPIO引腳
GPIO_InitStruct.Mode = GPIO_MODE_INPUT_PULLDOWN;// 下拉輸入
GPIO_Init(AS608_GPIO_PORT, &GPIO_InitStruct); // 初始化
AS608_AF_UART_TX(); // UART_TX復用
AS608_AF_UART_RX(); // UART_RX復用
// 配置UART
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = band_rate; // 波特率
USART_InitStructure.USART_Over = USART_Over_16; // 配置USART的過采樣率。
USART_InitStructure.USART_Source = USART_Source_PCLK; // 設置時鐘源
USART_InitStructure.USART_UclkFreq = 64000000; //設置USART時鐘頻率(和主頻一致即可)
USART_InitStructure.USART_StartBit = USART_StartBit_FE; //RXD下降沿開始
USART_InitStructure.USART_StopBits = USART_StopBits_1; // 停止位1
USART_InitStructure.USART_Parity = USART_Parity_No ; // 不使用校驗
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 不使用流控
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 收發模式
USART_Init(AS608_UART, &USART_InitStructure); // 初始化串口1
// 優先級,無優先級分組
NVIC_SetPriority(AS608_UART_IRQ, 0);
// UARTx中斷使能
NVIC_EnableIRQ(AS608_UART_IRQ);
// 使能UARTx RC中斷
USART_ITConfig(AS608_UART, USART_IT_RC, ENABLE);
}
/************************************************
函數名稱 : uart2_send_byte
功 能 : 串口發送一個字節
參 數 : ucch:要發送的字節
返 回 值 :
作 者 : LC
*************************************************/
void uart2_send_byte(uint8_t ucch)
{
// 發送一個字節
USART_SendData_8bit(AS608_UART, (uint8_t)ucch);
// 等待發送完成
while( RESET == USART_GetFlagStatus(AS608_UART, USART_FLAG_TXE) ){}
}
/************************************************
函數名稱 : uart2_receive_clear
功 能 : 清除串口接收的全部數據
參 數 : 無
返 回 值 : 無
作 者 : LC
*************************************************/
void uart2_receive_clear(void)
{
unsigned int i = 0;
for( i = 0; i < USART2_RECEIVE_LENGTH; i++ )
{
u2_recv_buff[ i ] = 0;
}
u2_recv_length = 0;
u2_recv_flag = 0;
}
/******************************************************************
* 函 數 名 稱:get_as608_touch
* 函 數 說 明:獲取是否有手指觸摸識別區
* 函 數 形 參:無
* 函 數 返 回:0沒有觸摸 1有觸摸
* 作 者:LC
* 備 注:無
******************************************************************/
char get_as608_touch(void)
{
if( TOUCH_IN == 1 )//觸摸為1
{
//printf("Touch-1rn");
return 1;
}
else
{
//printf("Touch-0rn");
}
return 0;
}
/******************************************************************
* 函 數 名 稱:FPM10A_Cmd_Send_Pack_Head
* 函 數 說 明:發送包頭
* 函 數 形 參:無
* 函 數 返 回:wu
* 作 者:LC
* 備 注:無
******************************************************************/
void FPM10A_Cmd_Send_Pack_Head(void)
{
int i;
for(i=0;i 0 )
{
delay_ms(1);
timeout--;
}
delay_ms(100); // 一定要加延時!!!
if( u2_recv_flag == 1 )
{
u2_recv_flag = 0;
for (i=0;i>8;
FPM10A_Save_Finger[6] = (storeID&0x00FF);
for(i=0;i> 8; //存放校驗數據
FPM10A_Save_Finger[8]= temp & 0x0000FF;
FPM10A_Cmd_Send_Pack_Head(); //發送通信協議包頭
for(i=0;i
在文件bsp_as608.h中,編寫如下代碼。
/*
* Change Logs:
* Date Author Notes
* 2024-06-19 LCKFB-LP first version
*/
#ifndef _BSP_AS608_H_
#define _BSP_AS608_H_
#include "board.h"
#define AS608_GPIO_RCC_ENABLE() __RCC_GPIOA_CLK_ENABLE() // GPIO時鐘
#define AS608_UART_RCC_ENABLE() __RCC_UART2_CLK_ENABLE() // 串口2的時鐘
#define AS608_AF_UART_TX() PA02_AFx_UART2TXD()
#define AS608_AF_UART_RX() PA03_AFx_UART2RXD()
#define AS608_GPIO_PORT CW_GPIOA // GPIO端口
#define AS608_TX_PIN GPIO_PIN_2 // 串口TX的引腳
#define AS608_RX_PIN GPIO_PIN_3 // 串口RX的引腳
#define AS608_TOUCH_PIN GPIO_PIN_1 // TOUCH的引腳
#define AS608_UART CW_UART2 // 串口2
#define AS608_UART_IRQ UART2_IRQn // 串口2中斷
#define AS608_UART_IRQHandler UART2_IRQHandler // 串口2中斷服務函數
#define TOUCH_IN GPIO_ReadPin( AS608_GPIO_PORT, AS608_TOUCH_PIN )
/* 串口緩沖區的數據長度 */
#define USART2_RECEIVE_LENGTH 1024
extern uint8_t u2_recv_buff[USART2_RECEIVE_LENGTH]; // 接收緩沖區
extern uint16_t u2_recv_length; // 接收數據長度
extern uint8_t u2_recv_flag; // 接收完成標志位
void as608_gpio_config(uint32_t band_rate);
char get_as608_touch(void);
void uart2_receive_clear(void);
char Device_Check(void);
void FPM10A_Add_Fingerprint(void);//添加指紋
unsigned int FPM10A_Find_Fingerprint(void);//查找指紋
void FPM10A_Delete_All_Fingerprint(void);
#endif
04移植驗證
在自己工程中的main主函數中,編寫如下。
/*
* Change Logs:
* Date Author Notes
* 2024-06-19 LCKFB-LP first version
*/
#include "board.h"
#include "stdio.h"
#include "bsp_uart.h"
#include "bsp_as608.h"
int32_t main(void)
{
board_init(); // 開發板初始化
uart1_init(57600U); // 串口1波特率115200
as608_gpio_config(57600U);
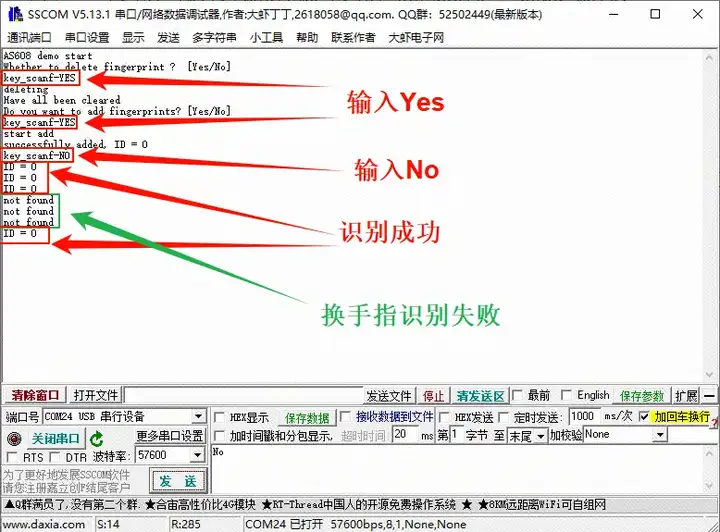
printf("AS608 demo startrn");
Device_Check();//模塊檢測
FPM10A_Delete_All_Fingerprint(); //是否刪除全部指紋
FPM10A_Add_Fingerprint();//是否添加指紋
while(1)
{
FPM10A_Find_Fingerprint();//查找指紋
}
}
上電現象:
模塊移植成功案例代碼:
鏈接:https://pan.baidu.com/s/13OYXBko_GfKrS4aRVg1VLg?pwd=LCKF
提取碼:LCKF
審核編輯 黃宇
-
傳感器
+關注
關注
2567文章
53091瀏覽量
768372 -
指紋識別傳感器
+關注
關注
0文章
19瀏覽量
14882 -
CW32
+關注
關注
1文章
256瀏覽量
1270
發布評論請先 登錄
超聲波指紋模組靈敏度飛升!低溫納米燒結銀漿立大功
代碼+案例+生態:武漢芯源半導體CW32嵌入式開發實戰正式出版
【CW32模塊使用】MQ-4甲烷檢測傳感器

【CW32模塊使用】TCS34725顏色識別傳感器

【CW32模塊使用】SGP30氣體傳感器
CW32模塊使用 人體紅外傳感器

【CW32模塊使用】微波多普勒無線雷達傳感器

【CW32模塊使用】雨滴傳感器
基于CW32模塊的火焰傳感器設計
國產人工智能教學實驗箱操作案例分享:5-27 指紋識別實驗
項目分享 | 小熊派DIY一款指紋門鎖
【CW32模塊使用】紅外測距傳感器

英飛凌推出帶指紋傳感器的生物識別芯片卡模塊
CW32模塊使用 紅外循跡傳感器





 工商網監
工商網監

評論