 一文弄懂3種差分GPS定位方式的技術原理
一文弄懂3種差分GPS定位方式的技術原理
GPS定位應用廣泛,我們使用的手機和汽車就自帶GPS定位功能,它給我們的生活提供了許多便利。GPS定位存在一定的誤差,誤差來自3方面:一方面是由衛星鐘誤差、星歷誤差、電離層誤差、對流層誤差等導致的;另一方面是由傳播延遲導致的;此外還有用戶接收機固有的誤差,由內部噪聲、通道延遲、多路徑效應等原因導致的。
為了盡可能消除GPS定位誤差,我們可以引入差分GPS定位技術。利用差分技術,衛星鐘誤差、星歷誤差、電離層誤差、對流層誤差可以完全消除;傳播延遲誤差大部分可以消除,消除程度主要取決于基準接收機和用戶接收機的距離;內部噪聲、通道延遲、多路徑效應誤差則無法消除。
關于差分定位的技術原理,我們在前面的文章介紹過,大家可以參考文章:GPS定位及差分GPS定位技術原理 ,接下來我們來介紹3種差分GPS定位方式。
差分GPS定位分為:位置差分、偽距差分( RTD)和載波相位差分(RTK),接下來我們來分別介紹。
位置差分
已知坐標點的差分定位基準站實時觀測4顆衛星后進行三維定位,得出當前基準站的坐標測量值;
將坐標測量值與基準站實際坐標值的差值作為差分校正量,基準站利用數據鏈將所得的差分校正量發送給流動站,流動站用接收到的差分校正量在自身衛星接收機接收到的測量值的基礎上進行坐標修改。
注意事項:采用位置差分技術時,基準站與流動站必須觀測同一組衛星,流動站與基準站之間的距離不超過100km。
偽距差分
偽距差分是當前應用最為廣泛的一種差分技術,在一定范圍的定位區域內,設置一個或多個定位基準站,連續觀測所有在信號接收范圍內的衛星偽距,基準站利用已知坐標計算出自己到衛星的幾何距離;
將幾何距離與觀測所得的偽距比較,利用一個α-β濾波器將此差值濾波并求出其偽距修正值,并將所有衛星的偽距修正值傳輸給流動站,流動站利用此修正值來修改衛星傳輸來的測量偽距。
注意事項:采用偽距差分技術時,流動站與基準站距離越近,定位精度越高。
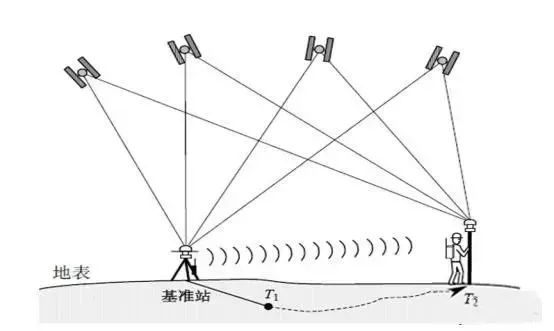
載波相位差分(RTK)
載波相位差分技術,又稱實時動態載波相位差分技術(Real Time Kinematic,RTK);
載波相位差分技術中基準站不直接傳輸關于衛星測量的差分校正量,而是發送衛星的測量原始值及自身坐標信息;
流動站收到基準站的數據后,與自身觀測衛星的數據組成相位差分觀測值,利用組合后的測量值求出基線向量,完成相對定位,進而推算出測量點的坐標;
采用RTK進行定位工作時,除了配備基準站接收機和流動站接收機外,還需要配備數據通信設備;
基準站需將自己所獲得的載波相位觀測值及基準站坐標通過數據通信鏈實時播發給在其周圍工作的動態用戶;
流動站數據處理模塊使用動態差分定位的方式確定出流動站相對應基準站的位置,然后根據基準站的坐標求得自己的瞬時絕對位置。
注意事項
在實際應用中,有2種實現載波相位差分的方法,分別是修正法和差分法;
修正法:基準站將載波相位修正量發給流動站,以改正其載波相位觀測值,得到自身坐標;
差分法:將基準站觀測的載波相位測量值發送給流動站,讓其自身求出差分修正量,從而實現三維定位;
前者為準RTK技術,后者為真正的RTK技術。
審核編輯 黃宇
-
gps
+關注
關注
22文章
2895瀏覽量
166197 -
定位
+關注
關注
5文章
1330瀏覽量
35358 -
RTK
+關注
關注
8文章
130瀏覽量
37511
發布評論請先 登錄
相關推薦
AFE4404 INP和INM這兩個引腳為什么需要差分輸入,這種差分輸入的好處是?
GPS/北斗RTK差分定位系統的技術原理以及應用領域

北斗高精度人員定位系統是什么?一文弄懂

化工廠室外GPS 北斗RTK差分人員定位系統解決方案
人員定位系統技術原理包括哪些方面?一篇弄懂

基于北斗差分定位的桿塔傾斜/沉降/位移監測系統





 工商網監
工商網監
評論