") 無人機自主智能控制的關系及其實現(xiàn)的工程方法與方案
無人機自主智能控制的關系及其實現(xiàn)的工程方法與方案
分析研究了無人機的本質(zhì)與內(nèi)涵,系統(tǒng)闡述了無人機自主與智能控制的內(nèi)涵與本質(zhì)以及二者的關系,提出了無人機自主控制的設計理念和工程實施要素,合理規(guī)劃了自主智能控制的等級,提出了無人機自主智能控制實現(xiàn)的工程方法與方案,構建了自主智能控制系統(tǒng)工程實現(xiàn)的架構。
1 引言
從古老的傳說或寓言故事中可知,人類自誕生起,就夢想著能夠像鳥一樣飛行,人類通過一代一代幻想、努力、前赴后繼地探索如何能夠自由地在天空中飛翔,人類嘗試了多種方法,如: 使用風箏、早期的火箭、飛車、熱氣球以及滑翔機,但都沒能實現(xiàn)自由飛行。
到了1903年,萊特兄弟用自己設計的“飛行機器—飛機”完成了人類第一次動力載人飛行,實現(xiàn)了人類在空中飛行的夢想。在人類夢想在天空中飛翔的同時,人們也開始設想人不在飛機上,在地面上控制 飛機的飛行,這就產(chǎn)生了無人機的概念,1916年美國的斯佩里(Sperry)和勞倫斯(Lawrence)進行了首次無人機飛行,自此開啟了人類對無人機的研究先河, 經(jīng)過第一次世界和第二次世界大戰(zhàn),特別是經(jīng)過冷戰(zhàn)時期,無人機得到了長足的發(fā)展;無人機經(jīng)過100年的發(fā)展,形成了龐大的家族體系,分支眾多,可以從機身結構、體積重量、飛行高度、航程、航時、用途等多個維度對其進行分類,如從機身結構特征進行分類, 可分為無人直升機、無人固定翼飛機、無人多旋翼飛行器、無人飛艇、無人傘翼機和撲翼無人機等;從體積重量特性來分類,可分為大型無人機、中型無人機、小型無人機和微型無人機;按用途可分為軍用無人機(情報、偵察、監(jiān)視、誘餌、電子對抗、通信中繼、靶機和無人戰(zhàn)斗機等)、民用無人機(如警用、消防、氣象)和消費級無人機(航拍、游戲等休閑用途);還可分為高空無人機、長航時無人機、遠程無人機、高空長航時無人機等。
世界上任何事物的發(fā)展都是與時俱進的,其實質(zhì)內(nèi)涵與外表特征都在不斷地演變進化,無人機也是如此,對無人機的定義與內(nèi)涵也需不斷地動態(tài)完善,無 人機從簡單的人遙控飛機飛行時代發(fā)展到現(xiàn)在的無人機自動(自主)飛行階段,也應適應技術的發(fā)展和人們認識的提高而有較明確的定義,否則對無人機技術的發(fā)展不利,甚至阻礙無人機技術的發(fā)展。本文就無人機的發(fā)展變遷進行了研究分析,歸納 了無人機的內(nèi)涵和定義及其發(fā)展,闡述了無人機控制的內(nèi)涵,探討了自主與智能二者之間的相互關系,給出了自主智能控制設計理念和工程要素,提出了無人機自主智能控制實現(xiàn)方法與方案。
2 無人機的定義與內(nèi)涵
1916年9月12日, 美國的斯佩里(Sperry)和勞倫斯 (Lawrence)的“休伊特-斯佩里自動飛機(Hewitt-Sperry AutomaticAirplane)”完成人類第一次有動力無人飛行,人類便開啟了無人機研究的新紀元,人們在最初定義無人機時,采用的是最直觀的物理概念,只考慮了飛行員與飛機的物理位置關系,即:飛機上沒有飛行員的飛機則稱為無人機,起初在英語中用pilotlessaircraft表達,這也是無人機最基本的內(nèi)涵。
隨著無線電遙控技術的發(fā)展,航空工程師使用了無線電在地面遙控無人機的飛行,這就出現(xiàn)了遙控飛行器(Remotely Piloted Aerial Vehicle, RPAV)和遙控飛 行系統(tǒng)(Remotely Piloted Aircraft System, RPAS)術語,在此期間也有人使用UninhabitedAerialVehicle作為無人機的名稱術語。
Unmanned Aircraft System (UAS)在《無人機路 線圖2005~2030》被美國國防部和FAA所采用[1],并給出了定義:指不載有操作人員、利用空氣動力提供升力、可以自主飛行或遙控駕駛、可以一次使用也可回收使用、攜帶致命或非致命有效載荷的有動力飛行器。此定義明確了無人機的最基本內(nèi)涵:1) 飛機上無駕駛人員;2) 能完成一定的使命任務;3) 能夠重復使用。
依據(jù)上面的定義,彈道或半彈道飛行器、巡航導彈和炮彈不能看作是無人飛行器,原因是導彈不能回 收;目前遙控航空模型飛機是否屬于無人機仍有疑義和爭論,未有定論,主要原因是現(xiàn)代航空模型飛機也采用了先進的控制技術,其功用也在變化,從司法層面和飛行管理層面上無法明確鑒定。筆者認為:如果只是在視距內(nèi)進行表演娛樂活動, 遙控航空模型飛機可認為不屬于無人機,
無人機發(fā)展到現(xiàn)在,在技術上使用Unmanned Aerial Vehicle (UAV)來代表無人機,而在民間中,則經(jīng)常使用drone(老式軍用無人機發(fā)動機有規(guī)則的噪聲與公蜂的蜂鳴相似的原因)來代表無人機[1,2]。
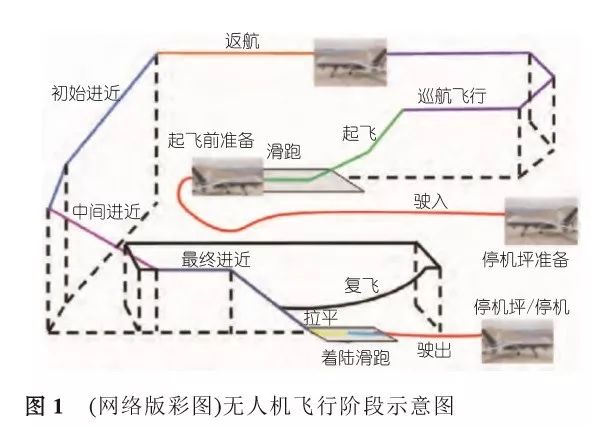
無人機的兩種形式表達:unmannedaerialvehicle和uninhabitedaerialvehicle仔細探究其含義是有區(qū)別的,unmanned從字面上有兩個含義: 其一是直接的含義,無人的,飛機上無人;其二是無人操縱的;而uninhabited只有飛機上無人的含義。從unmanned字面上講,無人 機應同時具備兩個含義, 即: 人不在飛機上并且人不操控飛機, 飛機能夠“正常”飛行,也就是說無人機從起飛準備-滑行-起飛-空中飛行-返場著陸-退出關停的全過程(圖1)都可不需要人介入。因此,用“unmanned aerialvehicle”來定義無人機是最合適的,更能體現(xiàn)“真” 無人機的內(nèi)涵。無人作戰(zhàn)飛機(UCAV)的英文表達應為: unmanned combat aerial vehicle。
無人機經(jīng)過100年的發(fā)展,其演變與發(fā)展是全方位的,其內(nèi)涵也發(fā)生了重大變化,無論執(zhí)行的任務千變?nèi)f化,但其最根本的變化還是其飛行控制方式的變 化,按照無人機飛行控制方式的變化,無人機經(jīng)歷了 下面幾個發(fā)展階段,并形成了相應種類的無人機:
(1) 遙控飛行無人機(階段);
(2) 遙控加局域自動飛行無人機(階段);
(3) 全自動飛行無人機(階段);
(4) 全自動加局域自主飛行無人機(階段);
(5) 全自主飛行無人機階段(下一階段,即將來臨)。
目前,國際上無人機的最高水平是全自動加局域自主飛行無人機,根據(jù)不同的任務需求以及人力和成本的情況,依據(jù)實際情況來選擇無人機的種類,這幾 類無人機可以并存,相互補充,充分發(fā)揮每一種無人 機的優(yōu)勢。
技術發(fā)展到現(xiàn)階段,從狹義上定義,無人機的飛 行可與人沒有直接關系,即: 人與無人機二者存在隔離的狀態(tài);從廣義上講,由于無人機作為一類可飛行的工具或武器,人要使用它,就必須明確“人機權限”問題:人是無人機的主人(主宰),無人機的行為要聽從人的管控,但人的自身能力、精力以及精確控制飛機能力的限制,不可能分分秒秒或時時刻刻管控無人 機,因此無人機必須要有獨立自主(自動)工作的能力。
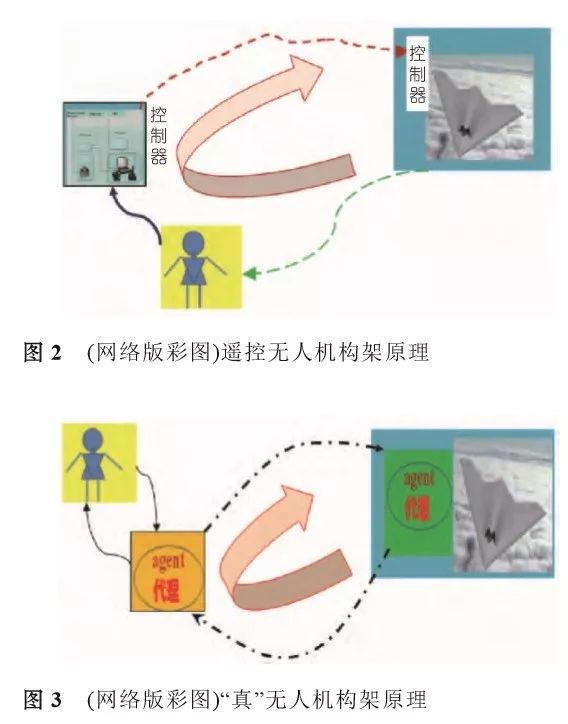
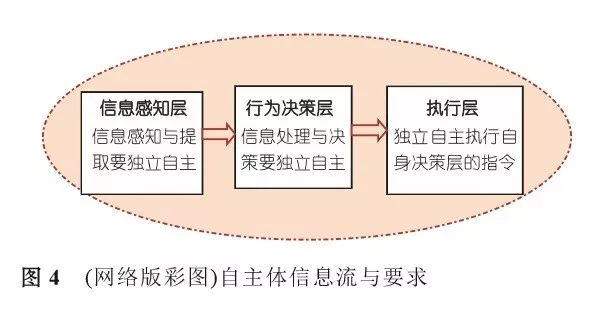
從上面的分析中可知,遙控飛行無人機(remotely piloted vehicle)與“真”無人機(unmanned aerial vehicle) 其內(nèi)涵和本質(zhì)是有區(qū)別的。遙控飛行的無人機的構架原理圖見圖2,“真”無人機的構架原理圖見圖3。從圖2和3可直觀看到二者的不同,遙控飛行無人機是在人直接控制下工作的,即人在其工作環(huán)中;而無 人機是在人授權下工作的,人在其工作環(huán)之外,而不是在工作環(huán)之中,這一本質(zhì)上的差別就導致了二者在設計中系統(tǒng)結構、控制功能和實現(xiàn)方法的不同。
無論怎樣給無人機下定義, 有自我獨立工作能力應是其本質(zhì)屬性, 但不變的原則是: 無人機由人使用,人是無人機的“主人”,無人機必須聽從人的管控,無人機自我獨立工作權限自然是由人隨時進行設置的,顯而易見,為實現(xiàn)無人機的功用,無人機的結構與能力是在“制造”它時構造的。
因此,標準的無人機應有3 個工作模態(tài):自主(自動)模態(tài)、人工干預模態(tài)和人工 操縱模態(tài)。這3種模態(tài)的使用是由人(操作員)設置與選擇的。人(操作員)選擇模態(tài)也應綜合考慮實際環(huán)境的 復雜情況, 可遵循“將在外, 君命有所不受”的原則進 行模態(tài)選擇. 上面的3個工作模式的定義與含義如下:
(1) 自主 (自動)模態(tài)是無人機系統(tǒng)的默認模式,此模式按照人制定的規(guī)則、理念、思路進行工作,管控無人機的飛 行;
(2) 人工干預模態(tài)是在自主(自動)模態(tài)下,人主動 糾正自主(自動)飛行的偏差,是在默認控制基礎上增 加一△增量;
(3) 人工操縱模態(tài)是在控制系統(tǒng)出現(xiàn)故障而無法自主(自動)控制無人機應急條件下,由人直接操縱飛機。一般情況下,人工操縱難以保證飛機的控制效果,其原因很簡單:人不在飛行現(xiàn)場,難以準確感知飛機的運動信息,因而也就難以準確控制飛機,無人機采用上述3個工作模態(tài)事實上也明確了“人 機權限”問題,人作為無人機的“主人”,人通過制定規(guī)則和策略管控無人機,無人機按規(guī)則和策略自主(自動)生成控制指令控制飛機的飛行;飛行中出現(xiàn)與人的設想不一致結果時,人可進行適度的修正;飛行出現(xiàn)應急情況時,人可直接操控飛機,這是“孤注一擲”的行為。
由于無人機在整個使用過程中,不同的飛行階段有不同的使命和任務,因此,三種工作模態(tài)在不同的飛行階段執(zhí)行不同任務命令,基于此原因,在構造無人機系統(tǒng)工作邏輯結構時,應采用“因地制宜”的原則進行飛行階段與3種工作模態(tài)的邏輯構造置,即:先確認階段,然后再選擇工作模態(tài)。采用上述模態(tài)也是涉及到無人機操控人員的日常培訓理念問題,按上面模態(tài)的設置,無人機日常的訓練方式應該是:以模擬器虛擬訓練為主,重點在任 務方面的訓練,飛行特情訓練為輔,再輔以少量的實 物飛行訓練的方式。
需要強調(diào)的是:既然無人機能夠自主(自動)飛行,就涉及到如何自主(自動)飛行?飛行的好與壞?即自主(自動)飛行的能力和水平,也就是其智能的高低,這 就出現(xiàn)了自主與智能的內(nèi)涵與相互關系問題。
3、自主/智能的本質(zhì)內(nèi)涵及其相互關系
自主/智能的本質(zhì)內(nèi)涵及其相互關系準則是無人 機設計的基本原則。
從一般意義上講,自主與智能是兩個不同范疇的概念,自主表達的是行為方式,由自身決策完成某行為則稱為“自主”;智能則是完成行為過程的能力[3],也就是運用的方式方法以及策略是否符合自然規(guī)律或符合人(或某團體)的行為規(guī)則,在千變?nèi)f化的環(huán)境中找到合理的“路徑”完成某項任務,則稱為是智能的。顯 而易見,智能是分層次和等級的[3]。
自主與智能二者之間的關系應該是:自主在前,智能在后,二者應該相輔相成;自主未必智能,但自主希望有智能;智能依賴自主,智能的等級取決于自主權的高低,智能是自主與知識及其知識運用的結合體,智能生成的一般過程應該是:在自主的前提下, 綜合運用權限范圍、主動性、愛好癡迷精神、感悟力… 等各方面能力,去感受信息、提取信息、積累知識、 總結知識、歸納特征并精化、提升完善知識結構、融會貫通知識以盡可能達到符合自然規(guī)律的目的。
智能具有相對性,不同“個體”的智能是有差別的,這些差別既來自其“出生”時所賦予的智能,又來自后天學習與完善所得到的智能。由于自然界及其存在的事物都是矛盾的統(tǒng)一體,“正確”與“錯誤”、“好”與 “壞”、“聰明”與“愚蠢”等等都是相對,可以互相轉化。
因此要正確理解、掌握和運用“智能”,應該認識到:在人類社會中,“高智能”是以人的標準或世界觀確定的,存在所謂的“高智能”與自然界的真“高智能”不一 致的現(xiàn)象,也存在“大智若愚”的現(xiàn)象,這是人的認識能力問題。這也是人類社會的“奧妙”之一,這也引申出中華民族的至理名言“智者千慮,必有一失”這句名言既是真理,又是公理,因此在設計個體智能策略時,必須利用對方的“失”,才能掌控對方、取勝對方,因此難點就是如何探知對方的“失”,一旦掌握了對方的“失”,制定策略取勝對方就易如反掌了。
需要強調(diào),人們往往把智力和智能混為一談,這是錯誤的。智力(智商)與智能的內(nèi)涵是完全不同的。智力是對知識獲取、推理和運用知識的能力,而智能是指從獲取的知識、知識推理和知識運用的結果符合自然規(guī)律的程度,智力只是智能形成的一個要素,有智力不一定是智能的,高智能一定是需要高智力。
在構造無人機時,應賦予無人機“相當”的自主和智能能力,以滿足人的需求,應基于上述的自主與智能的關系準則進行設計。
由于無人機是在人授權下工作的,無人機由人賦予智能的能力,在賦予智能能力過程中會“植入”使無人機會出現(xiàn)“災禍”的因子,所謂“災禍”是“天災”和“人禍”,“天災”是自然界的創(chuàng)造,人類無能力管控,“人禍” 是人主觀想干某事,由于能力問題或責任心問題(疏 忽),導致飛機不聽人的指揮或未按人的想法“做事”,出現(xiàn)人不想看到、更不想要、而人又無法控制的事情發(fā)生,這確實存在,強調(diào)的是:這些失控是暫時的,不可能永遠持續(xù);原因是無人機需要能量,其智能程度是有限的,再則人也可以采用其他手段管控或擊毀它,“機器將來局部取代人”的論斷在某種意義上是成 立的,但“機器將來控制人類”是不可能的,但會給人 類帶來“麻煩”或“災難”,此類“麻煩”或“災難”并不是完全不好,對于某些人群是“壞事”,但對于另外的人群是“好事”(前提是能管控住),用此特點對付“他人”。
具體個體的自主是有權限和范圍的,受到許多因素的限制,正如與人的自主概念是一樣的,一是人受到自然界的規(guī)律或法理限制,二是人受到所處群體的 制約(國家/制度、社會團體/規(guī)程、單位/條例、家庭/倫理道德);無人機的自主權限首先受人(使用者)限制,同時也受自身能力的制約,也受其使用環(huán)境的限 制(自然地理環(huán)境、飛機編隊要求、任務要求等)。
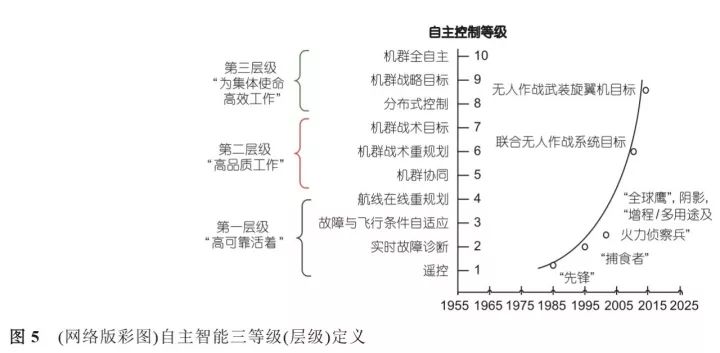
實現(xiàn)無人機自主行為方式的基本原則或底線是:必須具有獨立自主信息獲取能力、獨立自主信息處理與決策能力、獨立行為執(zhí)行能力。獨立自主信息獲取能力是自主的基礎,沒有獨立自主的信息獲取能力,就是“空中樓閣”,就是個“附庸”或“寄生蟲”;對無人機而言,如果信息需要外界提供,一旦外界不再提供信息,那么無人機就會變成“聾子、瞎子”;獨立自主信息處理與決策能力是自主的核心,否則就談不上自主,自己沒有主見,只聽別人發(fā)號施令,只能作“傀儡”;獨立行為執(zhí)行能力含義為獨立服從自身決策層的命令,依據(jù)自身的能力去執(zhí)行任務,而不是僅僅機械地執(zhí)行外來命令。因此,無人機成為完整的自主智能需要有上面的三層組成,三者是相互作用與依存,是命運共同 體,圖4示出了無人機自主智能體信息流圖和要求示。
無人機智能實現(xiàn)的基本原則或底線是: 在自主體三層面的每個層面都要有基本的智能功能和能力,三者協(xié)調(diào)互補;每層的智能功能應實現(xiàn)基本的自然規(guī)律或行為規(guī)則,有自學習和自完善的能力。信息感知與提取要獨立自主能力體現(xiàn)在下面三個方面:(1) 信息源應是自然屬性,信息源不能人為設置特征屬性,這會難以保證信息的唯一性、可信性和 安全性;(2) 信息源的信息感知要自主完成,不能利用其他外部信息和輔助段;(3) 信息特征的提取要自主完成,不能利用其他外部手段提供的特征信息。
顯而易見,GPS、北斗信息以及數(shù)據(jù)鏈提供的信息不是自主信息,這些信息傳感器(或設備)就不是自主信息傳感器(或設備);下面列出的傳感器(或設備) 屬于信息自主感知傳感器:慣性傳感器; 視覺感知設備;地形匹配感知設備;光學感知(激光/紅外/紫外等) 傳感器;天文信息感知傳感器;電磁感知傳感器。
以機場感知與特征提取為例說明信息感知與提取要獨立自主能力的含義。
在機場上安裝反光鏡或其他人為設置的標志來指示機場的位置特征、跑道的參數(shù)特征就不體現(xiàn)自主特性,因為這些人為設置的特征很容易改變或破壞,不能作為可信和唯一的信息屬性標志。應以跑道周圍難以改變的屬性特征作為信息源,周圍面積大小根據(jù)距離的遠近選擇,從遠到近,區(qū)域面積逐步減小,區(qū) 域內(nèi)以人難以改變的屬性特征為信息提取特征:如高山、河流、自然景觀以及它們之間的相互關系為屬 性,這樣就既能實現(xiàn)自主,又能進行故障識別與故障 重構,為自主決策提供可信和唯一特征的信息。
目前人是自然界的“精靈”,是最為合理的自主智能綜合體。無人機的設計理念應遵循人體結構和人思維/行為邏輯的關系,復雜性管理的策略和方針應是 “分而治之”(divideandrule)[4]。人的智能處理是分層次的,對外界的信息處理和響應分優(yōu)先級,生死問題優(yōu)先處理,提高和改善生活質(zhì)量和環(huán)境次之,不同的條件下,生死問題處理方法也不一樣。因此, 無人機作為人使用的工具,其智能處理也應分層次和等級[1,5],有優(yōu)先級。建議以優(yōu)先級為原則將無人機智能等級分3個等級(層級)(圖5)。
第一等級是無人機個體安全飛行等級,定義為“高可靠活著”:能夠安全飛行,高度、速度和姿態(tài)等狀態(tài)是安全的;有防撞能力,能自主安全的規(guī)避靜止和動的物體;空中加受油能力,確保有飛行能量;故障重構和自修復能力;特情安全著陸能力。
第二等級是完成小組特定的工作,定義為“高品質(zhì)的工作”:能夠?qū)崿F(xiàn)四維導航,實現(xiàn)態(tài)勢感知與認知;能夠?qū)崿F(xiàn)路徑規(guī)劃與重規(guī)劃;任務規(guī)劃與重規(guī)劃;無意識信息的認知。
第三等級是實現(xiàn)機群協(xié)同任務,定義為“為集體使命高效工作”:編隊飛行;有人/無人協(xié)同作戰(zhàn);群體感知與態(tài)勢共享;集群聯(lián)合作戰(zhàn)。
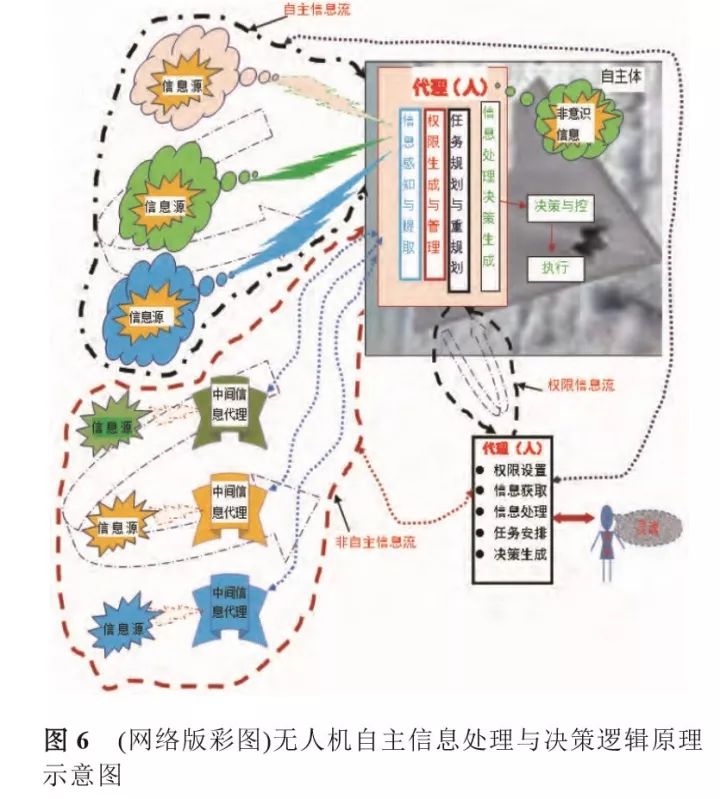
總之,為能實現(xiàn)上面3個等級的自主智能控制,“創(chuàng)造”出完整與完善的無人機, 應遵循下面的“創(chuàng)造”原則:在保證自主與智能的前提下,應借助其他手段和傳感器充分獲取和利用一切可用的信息,這樣可起到事半功倍的效果和作用,強調(diào)自主與智能必需確保底線。為實現(xiàn)這一原則,無人機必需具有3個信息環(huán):自主信息環(huán)、非自主(外來輔助)信息環(huán)、權限信息環(huán)(高智能還應有無意識信息環(huán));信息的獲取、處理與應用以及任務決策必須保證自主完成,這需要構造“代理機構”來實現(xiàn),至少有兩個“代理”,一是在地面上的“代理”, 完成人的指令構造與分發(fā),二是在飛機上的“代理”,實現(xiàn)完善的自主智能管控,其作用最為關鍵,是核心功能“構件”,沒有此“代理”,無人機就無法實現(xiàn)真正的自主智能使命。圖6示出了無人機信息流與結構。
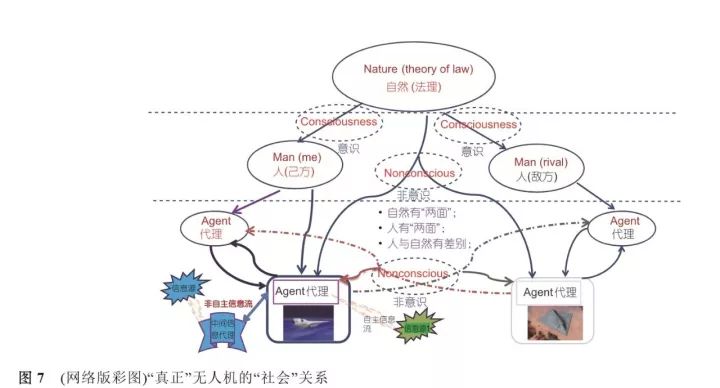
無人機在自然界能作為一完整獨立的個體,它應融入自然界中,它應與自然界、作為其主人的人和對手有密切的關聯(lián),否則難以達到自主智能的高境界,無人機本體與自然和人以及代理同時有關系才能實現(xiàn)“真正”的自主與智能功能。圖7示出了“真正”無人 機的“社會”關系。
4、無人機自主智能控制實現(xiàn)方法
正如人一樣,世界上任何有“生命”的事物構成都是一樣的,由載體(人為肉體)和功能靈魂兩部分組成的,因此,無人機自主智能控制系統(tǒng)也不例外,是由硬 件載體和載體所承載的功能靈魂(信息獲取與行為決策、控制律與控制邏輯等)組成(見圖8系統(tǒng)基本構成)。需要指出的是:硬件載體和功能靈魂是相互作用的,不同的載體承載不同的功能靈魂,高智能的靈魂需要高性能的載體,兩者是相輔相成的,“創(chuàng)造”無人機自主智能控制系統(tǒng)時必須對二者同時考慮,二者必須相 協(xié)調(diào)。

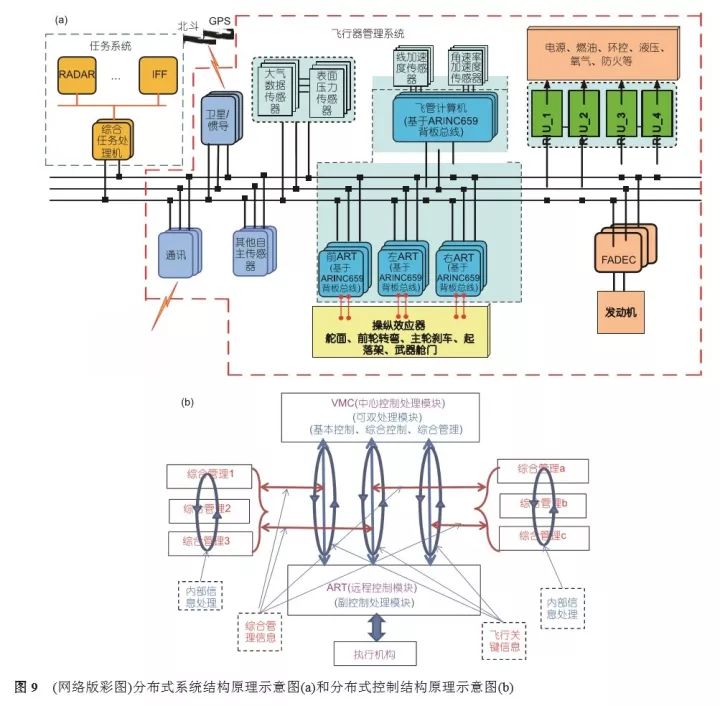
為能實現(xiàn)無人機自主智能控制,需要載體能擴充、功能能擴展、智能水平可提升、故障重構和自修復能力可完善,系統(tǒng)結構應采用分布式系統(tǒng),信息感知與獲取的傳感器(部件)、信息處理分析與決策計算單元、指令執(zhí)行部件采用相對獨立,并分布式配置,這里分布式配置有兩個含義,其一是硬件載體分布配置(圖9(a)),二是功能控制也是分布的,有主控制中心,也有副控制中心,還有輔助控制(圖9(b))[4,6]。相對來說,分布式載體構成與實現(xiàn)容易些,但對于自主智能的功能靈魂,要實現(xiàn)3層10級的自主智能等級要求,其邏輯與信息架構的“創(chuàng)造”難度是非常之大,經(jīng)分析研究,可行的邏輯與信息架構如圖10所示的四環(huán)結構,第一、第二個環(huán)完成第一層級的自主智能控制,實現(xiàn)“高可靠活著”;第一、第二和第三個環(huán)完成第二層級的自主智能控制,實現(xiàn)“高品質(zhì)的工作”; 第一、二、三、四環(huán)完成第三層級的自主智能控制。

實現(xiàn)“為集體使命高效工作”。上面的自主智能控制的框架結構基于“分而治之”的策略,先分層次,然后每個層級采用不同智能決策策略,簡化系統(tǒng)的復雜度。
5、討論與結論
本文作者在多年的研究基礎上,對無人機的定義和內(nèi)涵進行重新梳理,分析闡述了無人機的自主與智能控制的關系,初步形成了無人機自主智能控制實現(xiàn) 的基本理念和思路,構建了自主智能控制系統(tǒng)工程實現(xiàn)的架構,部分結果已在實際飛機控制系統(tǒng)中采用,這只是起步工作;雖然自主智能控制已有多年的研究歷史,但研究深度遠遠不夠,大多停留在理論層面上,工程應用層面上還處于萌芽狀態(tài),急需對具體的自主智能的信息感知方法、智能決策策略與實現(xiàn)方法(算法)進行深入研究。
-
智能控制
+關注
關注
4文章
598瀏覽量
42255 -
無人機
+關注
關注
229文章
10422瀏覽量
180198 -
自主控制
+關注
關注
0文章
4瀏覽量
2303
原文標題:無人機的自主與智能控制
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論