") 詳讀工業(yè)機器人的四大類細(xì)分條件
詳讀工業(yè)機器人的四大類細(xì)分條件
所謂,工業(yè)機器人是面向工業(yè)領(lǐng)域的多關(guān)節(jié)機械手或多自由度的機器裝置,它能自動執(zhí)行工作,是靠自身動力和控制能力來實現(xiàn)各種功能的一種機器。它可以接受人類指揮,也可以按照預(yù)先編排的程序運行,現(xiàn)代的工業(yè)機器人還可以根據(jù)人工智能技術(shù)制定的原則綱領(lǐng)行動。工業(yè)機器人由主體、驅(qū)動系統(tǒng)和控制系統(tǒng)三個基本部分組成。主體即機座和執(zhí)行機構(gòu),包括臂部、腕部和手部,有的機器人還有行走機構(gòu)。大多數(shù)工業(yè)機器人有3~6個運動自由度,其中腕部通常有1~3個運動自由度;驅(qū)動系統(tǒng)包括動力裝置和傳動機構(gòu),用以使執(zhí)行機構(gòu)產(chǎn)生相應(yīng)的動作;控制系統(tǒng)是按照輸入的程序?qū)︱?qū)動系統(tǒng)和執(zhí)行機構(gòu)發(fā)出指令信號,并進(jìn)行控制。
工業(yè)機器人按臂部的運動形式分為四種。直角坐標(biāo)型的臂部可沿三個直角坐標(biāo)移動;圓柱坐標(biāo)型的臂部可作升降、回轉(zhuǎn)和伸縮動作;球坐標(biāo)型的臂部能回轉(zhuǎn)、俯仰和伸縮;關(guān)節(jié)型的臂部有多個轉(zhuǎn)動關(guān)節(jié)。對于這些大家熟知的工業(yè)機器人,本文不再啰嗦,今天我們來細(xì)分一下工業(yè)機器人的四大類,看看你最熟悉的是哪一種。
多軸機器人
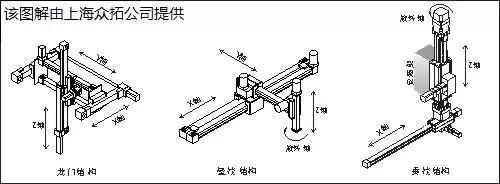
多軸機器人又稱單軸機械手,工業(yè)機械臂,電缸等,是以XYZ直角坐標(biāo)系統(tǒng)為基本數(shù)學(xué)模型,以伺服電機、步進(jìn)電機為驅(qū)動的單軸機械臂為基本工作單元,以滾珠絲桿、同步皮帶、齒輪齒條為常用的傳動方式所架構(gòu)起來的機器人系統(tǒng),可以完成在XYZ三維坐標(biāo)系中任意一點的到達(dá)和遵循可控的運動軌跡。 多軸機器人采用運動控制系統(tǒng)實現(xiàn)對其的驅(qū)動及編程控制,直線、曲線等運動軌跡的生成為多點插補方式,操作及編程方式為引導(dǎo)示教編程方式或坐標(biāo)定位方式。SCARA機器人
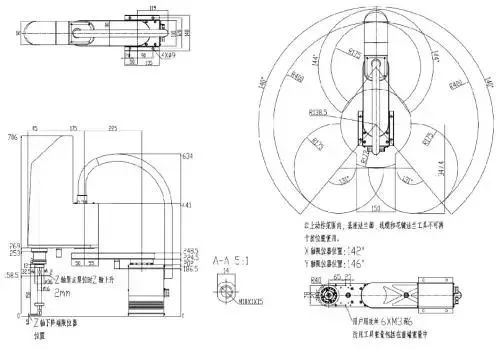
SCARA機器人是一種圓柱坐標(biāo)型的特殊類型的工業(yè)機器人。SCARA機器人有3個旋轉(zhuǎn)關(guān)節(jié),其軸線相互平行,在平面內(nèi)進(jìn)行定位和定向。另一個關(guān)節(jié)是移動關(guān)節(jié),用于完成末端件在垂直于平面的運動。手腕參考點的位置是由兩旋轉(zhuǎn)關(guān)節(jié)的角位移φ1和φ2,及移動關(guān)節(jié)的位移z決定的,即p=f(φ1,φ2,z),如圖所示。這類機器人的結(jié)構(gòu)輕便、響應(yīng)快,例如Adept 1型SCARA機器人運動速度可達(dá)10m/s,比一般關(guān)節(jié)式機器人快數(shù)倍。它最適用于平面定位,垂直方向進(jìn)行裝配的作業(yè)。

XY方向坐標(biāo)(前后左右)
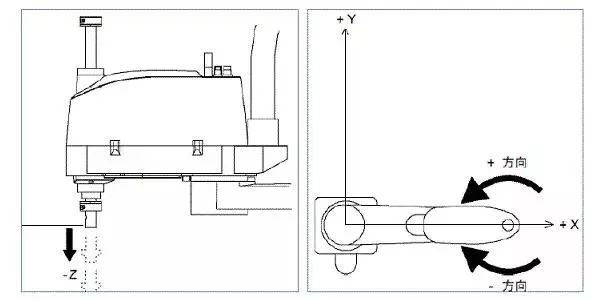
Z方向坐標(biāo)(上下)
坐標(biāo)機器人
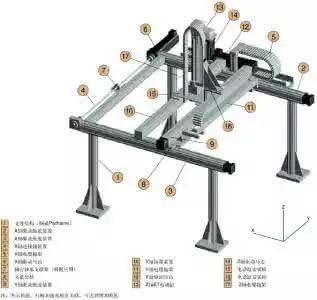
坐標(biāo)機器人是能夠?qū)崿F(xiàn)自動控制的、可重復(fù)編程的、多自由度的、運動自由度建成空間直角關(guān)系的、多用途的操作機。其工作的行為方式主要是通過完成沿著X、Y、Z軸上的線性運動。坐標(biāo)機器人采用運動控制系統(tǒng)實現(xiàn)對其的驅(qū)動及編程控制,直線、曲線等運動軌跡的生成為多點插補方式,操作及編程方式為引導(dǎo)示教編程方式或坐標(biāo)定位方式。
作為一種成本低廉、系統(tǒng)結(jié)構(gòu)簡單的自動化機器人系統(tǒng)解決方案,坐標(biāo)機器可以被應(yīng)用于點膠、滴塑、噴涂、碼垛、分揀、包裝、焊接、金屬加工、搬運、上下料、裝配、印刷等常見的工業(yè)生產(chǎn)領(lǐng)域,在替代人工,提高生產(chǎn)效率,穩(wěn)定產(chǎn)品質(zhì)量等方面都具備顯著的應(yīng)用價值。串聯(lián)和并聯(lián)機器人串聯(lián)機器人其串聯(lián)式結(jié)構(gòu)是一個開放的運動鏈,其所有運動桿并沒有形成一個封閉的結(jié)構(gòu)鏈。串聯(lián)機器人的工作空間大,運動分析比較容易可以避免驅(qū)動軸之間的耦合效應(yīng)。但其機構(gòu)各軸必須要獨立控制,并且需要搭配編碼器和傳感器來提高機構(gòu)運動時的精準(zhǔn)度。

而并聯(lián)機器人和傳統(tǒng)工業(yè)用串聯(lián)機器人在應(yīng)用上構(gòu)成互補關(guān)系,它是一個封閉的運動鏈。并聯(lián)機器人不易產(chǎn)生動態(tài)誤差,無誤差積累精度較高。另外其結(jié)構(gòu)緊湊穩(wěn)定,輸出軸大部分承受軸向力,機器剛性高,承載能力大。但是,并聯(lián)機器人在位置求解上正解比較困難,而反解容易。
2由度并聯(lián)機器人
3自由度并聯(lián)機器人
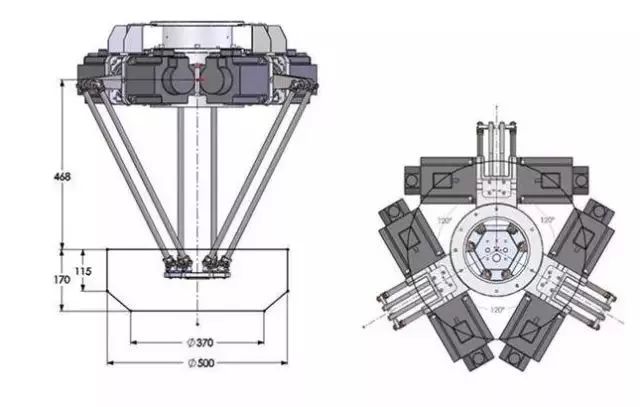
3自由度并聯(lián)機構(gòu)種類較多,形式較復(fù)雜,一般有以下形式:平面3自由度并聯(lián)機構(gòu),如3-RRR機構(gòu),它們具有2個移動和一個轉(zhuǎn)動;球面3自由度并聯(lián)機構(gòu),如3-UPS-1-S球面機構(gòu),該類機構(gòu)的運動學(xué)正反解都很簡單,是一種應(yīng)用很廣泛的3維移動空間機構(gòu);空間3自由度并聯(lián)機構(gòu),如Delta并聯(lián)機器人,這類機構(gòu)屬于欠秩機構(gòu),在工作空間內(nèi)不同的點其運動形式不同是其最顯著的特點。還有一類是增加輔助桿件和運動副的空間機構(gòu)。
4自由度并聯(lián)機器人
6自由度并聯(lián)機器人
6自由度并聯(lián)機構(gòu)是并聯(lián)機器人機構(gòu)中的一大類,是國內(nèi)外學(xué)者研究得最多的并聯(lián)機構(gòu),廣泛應(yīng)用在飛行模擬器、6維力與力矩傳感器和并聯(lián)機床等領(lǐng)域。但這類機構(gòu)有很多關(guān)鍵性技術(shù)沒有或沒有完全得到解決,比如其運動學(xué)正解、動力學(xué)模型的建立以及并聯(lián)機床的精度標(biāo)定等。
-
工業(yè)機器人
+關(guān)注
關(guān)注
91文章
3367瀏覽量
92709
原文標(biāo)題:干貨丨工業(yè)機器人的四大分類你清楚了么?
文章出處:【微信號:GKB1508,微信公眾號:工控幫】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論