") 【CW32開發(fā)】初探四足機器人
【CW32開發(fā)】初探四足機器人
一、認識機器人
機器人是一種自動執(zhí)行任務的機器,它可以模擬人類或其它生物的某些功能,并按照預設的程序或通過人工智能技術來執(zhí)行任務。
常見的一些基本概念有:
01定義:
機器人是具有感知、決策和執(zhí)行功能的自動化設備。它可以接受外部信息,進行處理,并據(jù)此執(zhí)行一定的動作。
02組成:
感知系統(tǒng):如攝像頭、傳感器等,用于接收外部信息。
控制系統(tǒng):如電腦、單片機等,用于處理信息和做出決策。
執(zhí)行系統(tǒng):如機械臂、驅(qū)動器等,用于執(zhí)行具體的動作。
03分類:
工業(yè)機器人:用于制造業(yè),如焊接、組裝、搬運等。
服務機器人:用于服務業(yè),如醫(yī)療、清潔、娛樂等。
特種機器人:用于特殊環(huán)境,如深海探測、空間探測等。
04關鍵技術:
驅(qū)動技術:包括電動、液壓、氣動等驅(qū)動方式。
感知技術:包括視覺、觸覺、聽覺等多種感知方式。
導航與定位技術:如GPS、激光導航、慣性導航等。
05人工智能:
使機器人具備自主學習、推理和決策的能力。
06應用領域:
機器人廣泛應用于制造業(yè)、醫(yī)療、家政、軍事、農(nóng)業(yè)、教育等多個領域。
二、初探CW32的四足機器人控制(用于玩和學習)
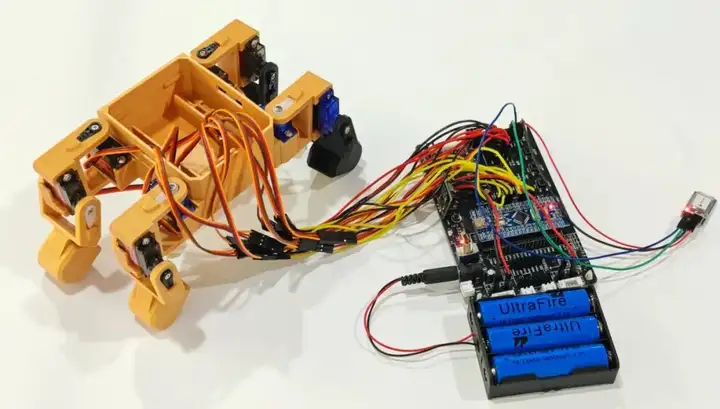
本項目使用8自由度舵機控制的四足機器人。主要用于愛好者學習參考。可實現(xiàn)基本控制姿態(tài):前進、左轉(zhuǎn)、右轉(zhuǎn)、打滑、伸展、站立、躺平、擺手。有興趣的朋友,也可以增加新步態(tài)控制。
01硬件組成
(1)主控原理圖
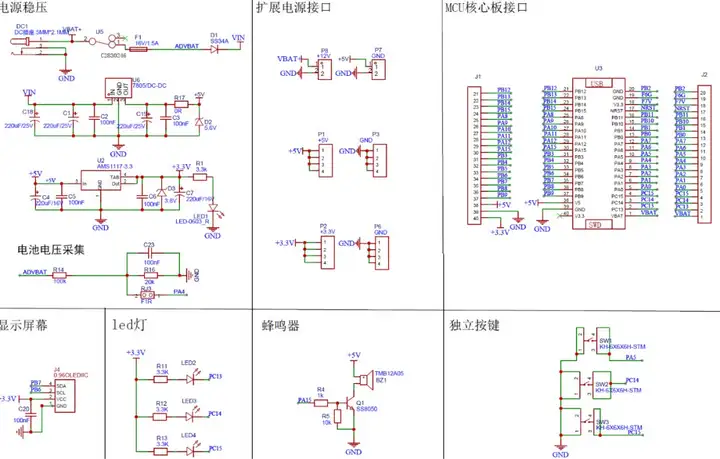
其中MCU核心板,選用CW32F030C8T6核心板。
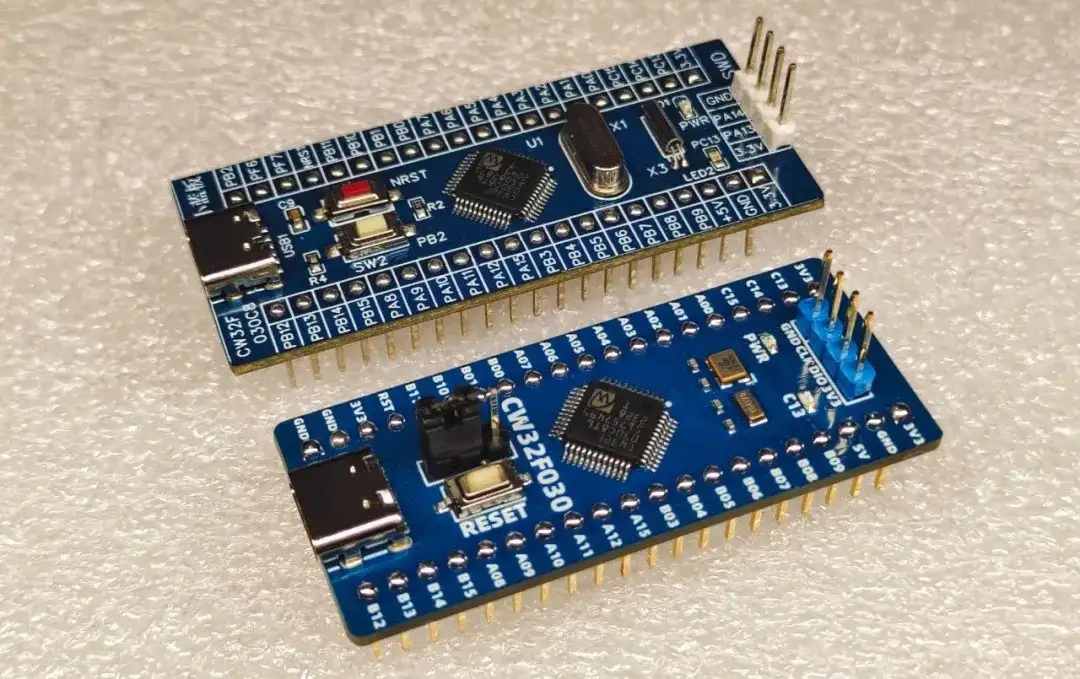
主要使用CW32F030C8T6以下產(chǎn)品特性:
- 內(nèi)核:ARM? Cortex?-M0+ -- 最高主頻 64MHz
- 工作溫度:-40℃ 至 105℃;工作電壓:1.65V 至 5.5V
- 存儲容量
最大 64K 字節(jié) FLASH,數(shù)據(jù)保持 25 年 @85℃
最大 8K 字節(jié) RAM,支持奇偶校驗
128 字節(jié) OTP 存儲器
- 時鐘管理
4 ~ 32MHz 晶體振蕩器
32kHz 低速晶體振蕩器
內(nèi)置 48MHz RC 振蕩器
內(nèi)置 32kHz RC 振蕩器
內(nèi)置 10kHz RC 振蕩器
內(nèi)置 150kHz RC 振蕩器
內(nèi)置 PLL 鎖相環(huán)
時鐘監(jiān)測系統(tǒng)
允許獨立關斷各外設時鐘
16位高級控制定時器,支持6路捕獲/比較通道和3對互補PWM輸出,死區(qū)時間和靈活的同步功能
四組 16 位通用定時器
三組 16 位基本定時器
窗口看門狗定時器
獨立看門狗定時器
三路低功耗 UART,支持小數(shù)波特率
兩路 SPI 接口 12Mbit/s
兩路 I2C 接口 1Mbit/s
IR 調(diào)制器
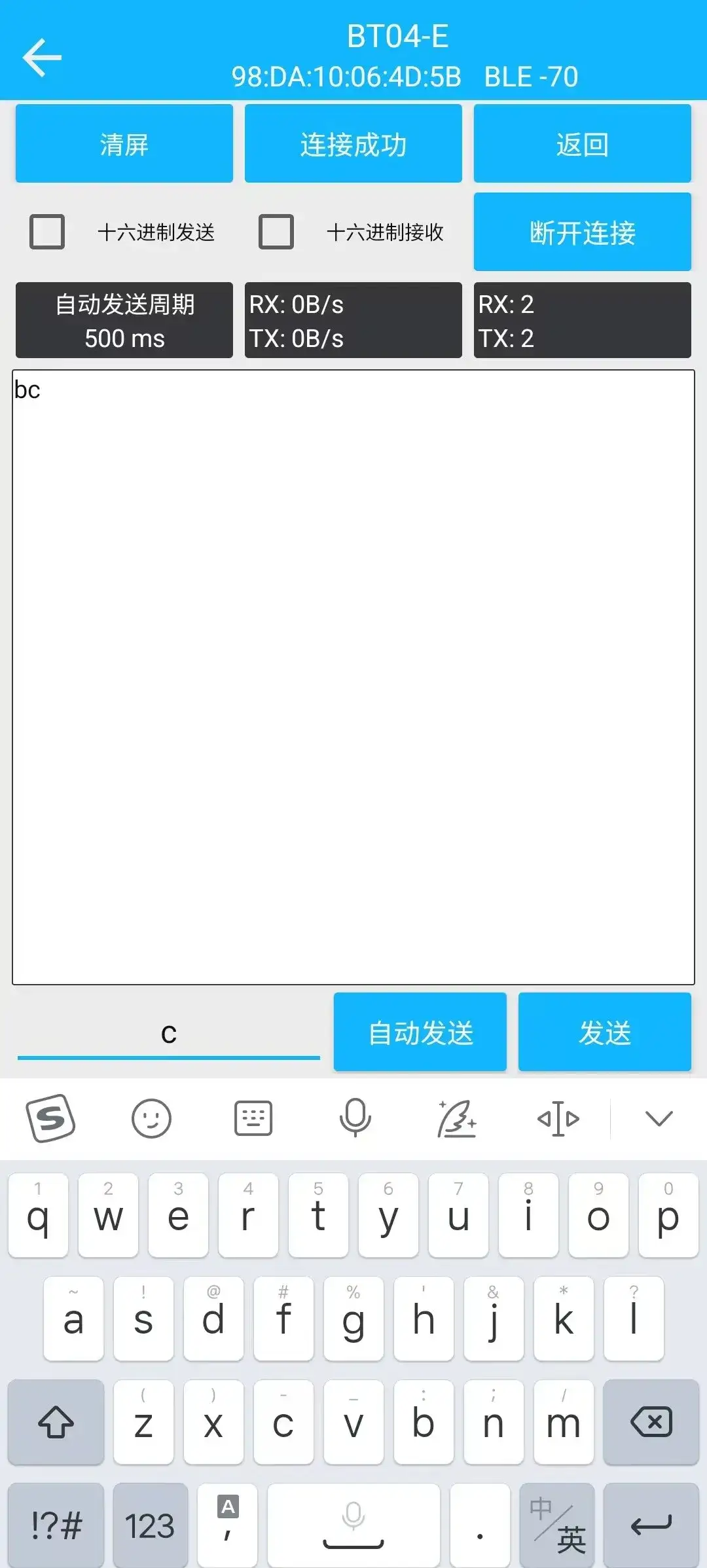
(2)藍牙模塊
DX-BT04-E藍牙模塊:采用BK3432芯片,支持SPP V3.0+BLE V4.2藍牙協(xié)議。支持AT指令,用戶可根據(jù)需要更改串口波特率、設備名稱等參數(shù)。具有成本低、功耗低、接收靈敏高等優(yōu)點。
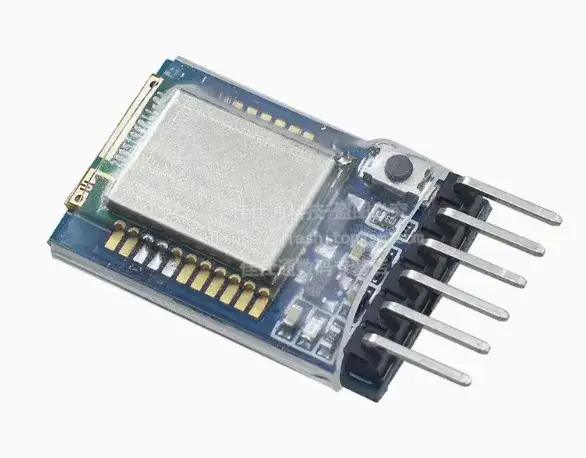
DX-BT04-E模塊與單片機連線 :
| GND | GND |
| 5V | 5V |
| TXD | PA10 |
| RXD | PA9 |

使用時,打開手機藍牙助手應用DX-SMART,設置UUID為BT16模塊,搜索藍牙設備連接BT04-E設備。

正常通訊界面如下:
溫馨提示:使用其它藍牙模塊時,注意2個問題:
1. 波特率設置時,藍牙模塊需與單片機相符。
2. 如果搜索不到設備,或Service失敗時,需指定正確的UUID,方可通訊。
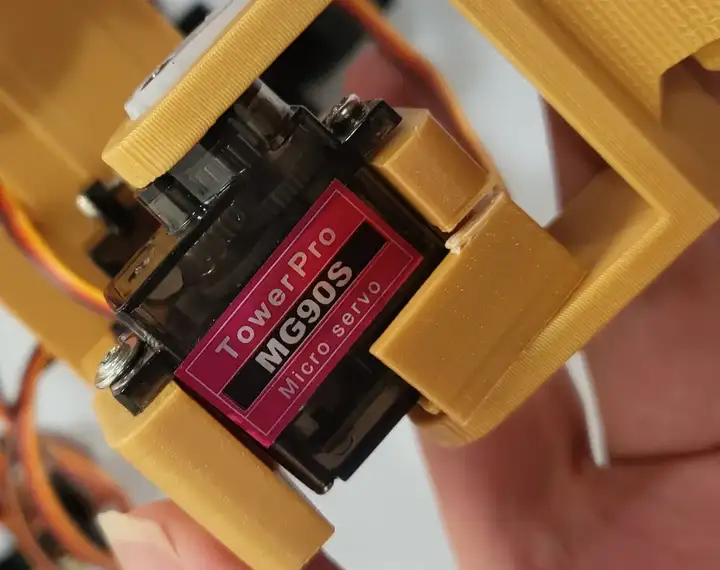
(3)舵機控制
舵機是運動控制的主要執(zhí)行機構。價格便宜,隨處可見。值得注意的是,就是因為便宜,堵轉(zhuǎn)過載時容易損壞。

本項目實驗時,也是隨機找了幾個舵機,沒有作區(qū)分使用。
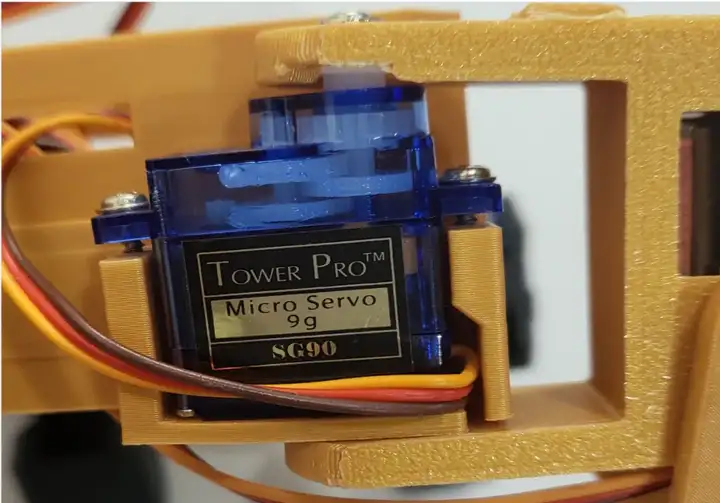
SG90舵機目前在高檔遙控玩具,如航模、包括飛機模型、潛艇模型、遙控機器人中已經(jīng)使用得比較普遍。
SG90舵機上有三根線,分別是GND(棕色線)、VCC(紅色線 接5V)和SIG(黃色線),也就是地線、電源線和信號線。
SG90舵機控制: 一般需要一個20ms 周期的時基脈沖,該脈沖的高電平部分一般為0.5ms~2.5ms 范圍內(nèi)的角度控制脈沖部分對應0度-180度機械周期的調(diào)節(jié)范圍。以180 度角度伺服為例,那么對應的控制關系是這樣的:
0.5ms ---------- 0 度;
1.0ms ---------- 45 度;
1.5ms ---------- 90 度;
2.0ms ---------- 135 度;
2.5ms ---------- 180 度;

值得一提的是:控制精度。本實驗使用的舵機配套的塑料齒。淘寶各賣家沒有提供具體齒數(shù)。
作者認為,這個控制精度在玩具類應用上沒有特別高要求。但需要明白這個角度控制精度為360度/齒數(shù)。
(4)結(jié)構安裝
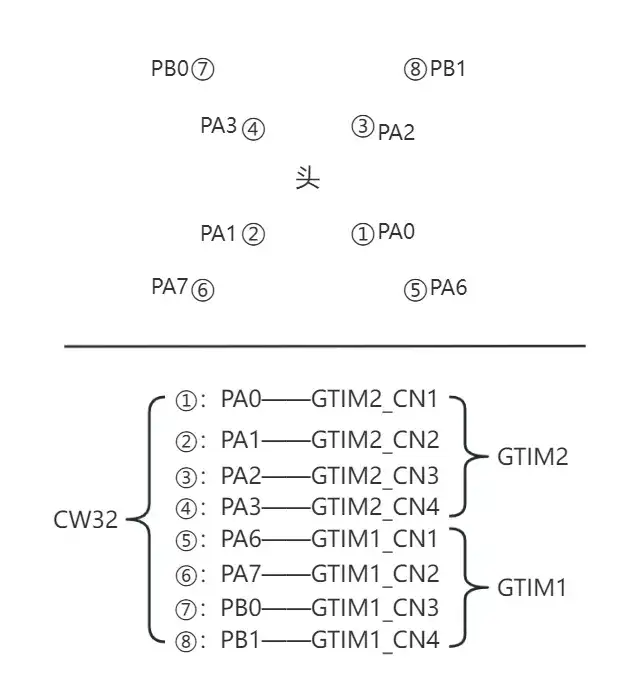
該項目使用8個舵機。編號定義分別為①~⑧。
安裝后的實物圖如下:
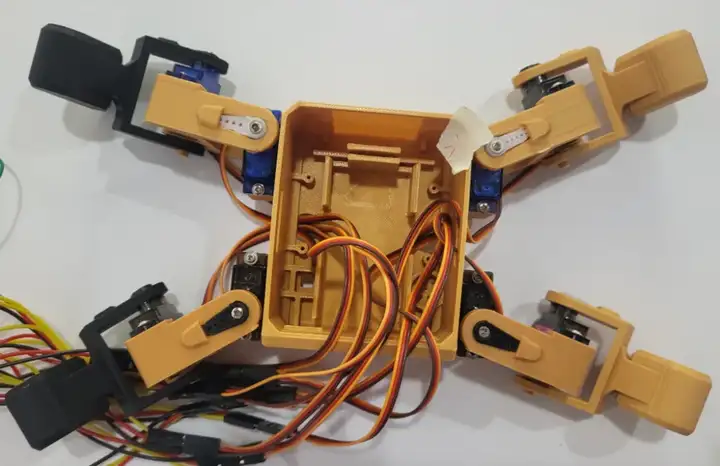
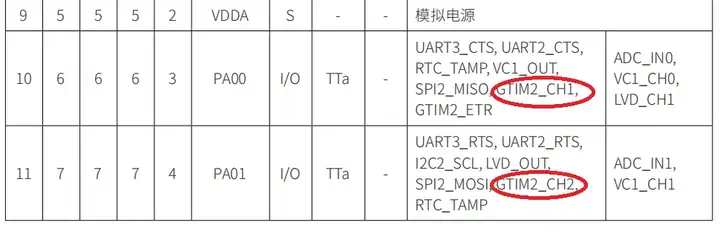
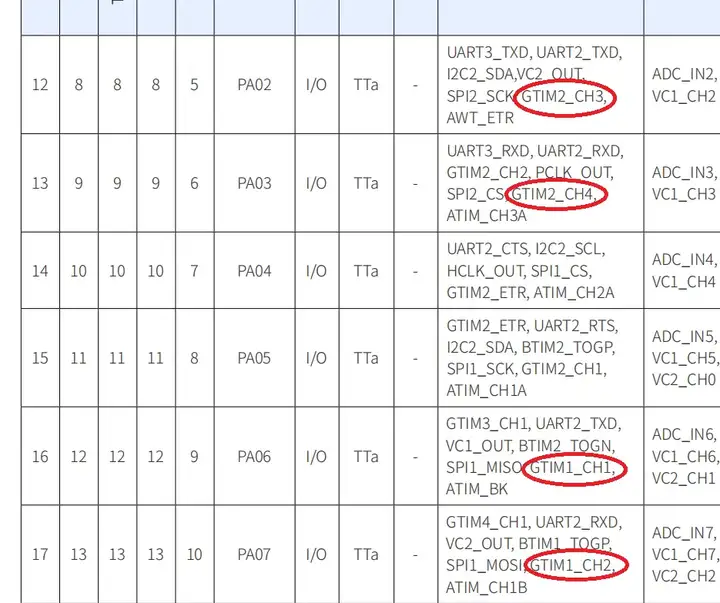
引腳定義如下:
在腳角安裝時,舵機的控制角度范圍需要測試并確定。以下圖為例,展示了①-④號舵機的角度限制范圍:
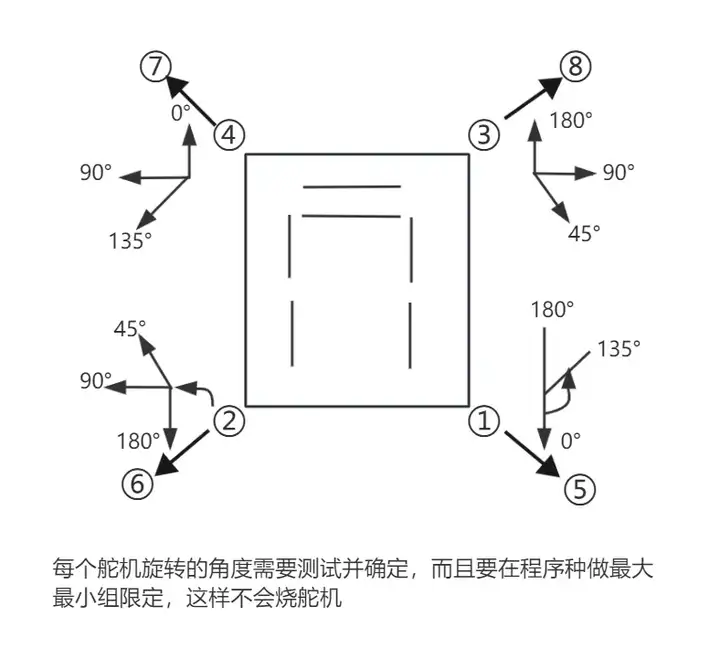
程序中需要對每個舵機的旋轉(zhuǎn)角度范圍做限制,才可輸出。否則,電機在旋轉(zhuǎn)時,受死角影響發(fā)生過載易產(chǎn)生損壞。
02 軟件組成
(1)使用的外設資源
(一)CW32F030內(nèi)部集成4 個通用定時器(GTIM),每個GTIM 完全獨立且功能完全相同,各包含一個16bit 自動重裝載計數(shù)器并由一個可編程預分頻器驅(qū)動。GTIM 支持定時器模式、計數(shù)器模式、觸發(fā)啟動模式和門控模式4 種基本工作模式,每組帶4 路獨立的捕獲/ 比較通道,可以測量輸入信號的脈沖寬度(輸入捕獲)或者產(chǎn)生輸出波形(輸出比較和PWM)。
項目中使用了通用定時器GTIM1GTIM2的PWM輸出功能。
(二)CW32F030的通用異步收發(fā)器(UART) 支持異步全雙工、同步半雙工和單線半雙工模式,支持硬件數(shù)據(jù)流控和多機通信;可編程數(shù)據(jù)幀結(jié)構;可以通過小數(shù)波特率發(fā)生器提供寬范圍的波特率選擇。UART 控制器工作在雙時鐘域下,允許在深度休眠模式下進行數(shù)據(jù)的接收,接收完成中斷可以喚醒MCU 回到運行模式。
項目中使用了串口UART3外設資源。

(2)主要實現(xiàn)代碼
主程序:
int main()
{
Board_Iint();
USART_SendString(CW_UART3,"Power on!");
fuwei2();
while (1)
{
if(UART_Flag == 1)
{
if(RxDate == 'a')//站立
{
zhanli();
}
if(RxDate == 'b')// 躺平
{
tangping();
}
if(RxDate == 'c')//擺手
{
baishou();
}
if(RxDate == 'd')//搖擺
{
yaobai();
Delay_ms(500);
yaobai();
Delay_ms(500);
}
if(RxDate == 'e')//左轉(zhuǎn)
{
zhanli();
Delay_ms(1000);
zhanli2();
Delay_ms(1000);
zuozhuan();
Delay_ms(1000);
zuozhuan();
}
if(RxDate == 'f')//打滑
{
dahua();
dahua();
}
if(RxDate == 'g')//前進
{
zhanli();
Delay_ms(200);
qianjin();
Delay_ms(200);
qianjin();
Delay_ms(200);
qianjin();
}
if(RxDate == 'h')//右轉(zhuǎn)
{
youzhuan();
youzhuan();
youzhuan();
}
UART_Flag=0;
}
}
}
藍牙串口中斷:
void UART3_IRQHandler(void)//串口3中斷服務函數(shù)
{
if (USART_GetITStatus(CW_UART3, USART_IT_RC) != RESET)//如果接受到了消息
{
RxDate = USART_ReceiveData_8bit(CW_UART3);//將寄存器的數(shù)據(jù)轉(zhuǎn)存在TxRxBuffer
UART_Flag=1;
USART_SendData_8bit(CW_UART3, RxDate);//將收到的消息發(fā)回給串口
USART_ClearITPendingBit(CW_UART3, USART_IT_RC);
}
}
/*復位或躺平姿態(tài)*/
void fuwei2 (void){
Servo_SetAngle(90);
Delay_ms(500);
Servo_SetAngle2(90);
Delay_ms(500);
Servo_SetAngle3(90);
Delay_ms(500);
Servo_SetAngle4(90);
Delay_ms(500);
Servo_SetAngle5(90);
Delay_ms(500);
Servo_SetAngle6(90);
Delay_ms(500);
Servo_SetAngle7(90);
Delay_ms(500);
Servo_SetAngle8(90);
Delay_ms(500);
}
舵機角度限制,并輸出控制。
void Servo_SetAngle(float Angle)
{
if(Angle135)Angle=135;
PWM_SetCompare1(Angle / 180 * 2000 + 500);
}
void Servo_SetAngle2(float Angle)
{
if(Angle170)Angle=170;
PWM_SetCompare2(Angle / 180 * 2000 + 500);
}
void Servo_SetAngle3(float Angle)
{
if(Angle135)Angle=135;
PWM_SetCompare4(Angle / 180 * 2000 + 500);
}
void Servo_SetAngle5(float Angle)
{
if(Angle130)Angle=130;
PWM_SetCompare6(Angle / 180 * 2000 + 500);
}
void Servo_SetAngle7(float Angle)
{
Angle=180-Angle;
if(Angle>130)Angle=130;
PWM_SetCompare7(Angle / 180 * 2000 + 500);
}
void Servo_SetAngle8(float Angle)
{
Angle=180-Angle;
if(Angle
通用定時器GTIM控制初始化。
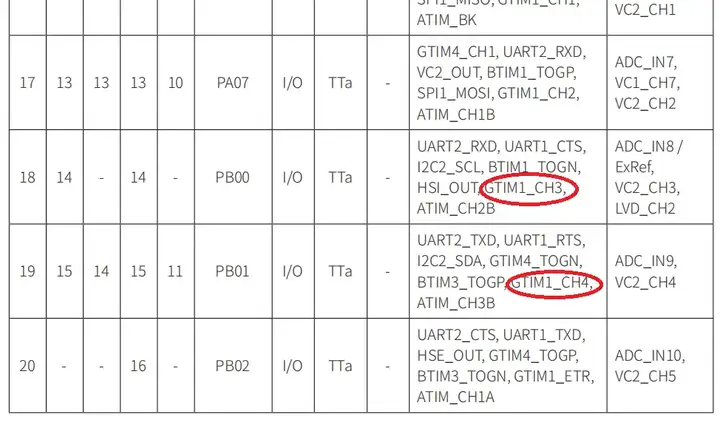
void GTIM_GPIOInit(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
__RCC_GPIOB_CLK_ENABLE();
__RCC_GPIOA_CLK_ENABLE();
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pins = GPIO_PIN_0|GPIO_PIN_1;
GPIO_InitStruct.Speed = GPIO_SPEED_HIGH;
GPIO_Init(CW_GPIOB, &GPIO_InitStruct);
PB00_AFx_GTIM1CH3();
PB01_AFx_GTIM1CH4();
GPIO_InitStruct.Pins = GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3|GPIO_PIN_6|GPIO_PIN_7;
GPIO_Init(CW_GPIOA, &GPIO_InitStruct);
PA00_AFx_GTIM2CH1();
PA01_AFx_GTIM2CH2();
PA02_AFx_GTIM2CH3();
PA03_AFx_GTIM2CH4();
PA06_AFx_GTIM1CH1();
PA07_AFx_GTIM1CH2();
}
void g_tim_init(void)
{
GTIM_InitTypeDef GTIM_InitStruct ;
__RCC_GTIM1_CLK_ENABLE(); // GTIM1時鐘使能
__RCC_GTIM2_CLK_ENABLE(); // GTIM1時鐘使能
GTIM_GPIOInit();
GTIM_InitStruct.Mode = GTIM_MODE_TIME;
GTIM_InitStruct.OneShotMode = GTIM_COUNT_CONTINUE;
GTIM_InitStruct.Prescaler =GTIM_PRESCALER_DIV64;
GTIM_InitStruct.ReloadValue =20000; //20MS
GTIM_InitStruct.ToggleOutState = DISABLE;
GTIM_TimeBaseInit(CW_GTIM1, >IM_InitStruct);
GTIM_TimeBaseInit(CW_GTIM2, >IM_InitStruct);
GTIM_OCInit(CW_GTIM1, GTIM_CHANNEL1, GTIM_OC_OUTPUT_PWM_LOW);
GTIM_OCInit(CW_GTIM1, GTIM_CHANNEL2, GTIM_OC_OUTPUT_PWM_LOW);
GTIM_OCInit(CW_GTIM1, GTIM_CHANNEL3, GTIM_OC_OUTPUT_PWM_LOW);
GTIM_OCInit(CW_GTIM1, GTIM_CHANNEL4, GTIM_OC_OUTPUT_PWM_LOW);
GTIM_OCInit(CW_GTIM2, GTIM_CHANNEL1, GTIM_OC_OUTPUT_PWM_LOW);
GTIM_OCInit(CW_GTIM2, GTIM_CHANNEL2, GTIM_OC_OUTPUT_PWM_LOW);
GTIM_OCInit(CW_GTIM2, GTIM_CHANNEL3, GTIM_OC_OUTPUT_PWM_LOW);
GTIM_OCInit(CW_GTIM2, GTIM_CHANNEL4, GTIM_OC_OUTPUT_PWM_LOW);
GTIM_Cmd(CW_GTIM1, ENABLE);
GTIM_Cmd(CW_GTIM2, ENABLE);
}
三、展望與未來
由于該項目為初探控機器人控制,使用的是現(xiàn)有硬件資源進行組裝調(diào)試。后期有機會可以設計一款小巧控制板,裝入結(jié)構中心,形成獨立機器人。
另外,姿態(tài)控制算法在本實驗中并未提及,數(shù)學基礎較好的愛好者可作深入研究。
本次項目為作者初次嘗試,如有不足之處,歡迎批評指證。

-
四足機器人
+關注
關注
1文章
90瀏覽量
15194 -
CW32
+關注
關注
1文章
203瀏覽量
626
發(fā)布評論請先 登錄
相關推薦
開源項目!OpenCat—— 一個全能的平價四足機器人
鴻蒙機器人與鴻蒙開發(fā)板聯(lián)動演示
七騰機器人:防爆輪式機器人-四輪八驅(qū)全新上線

在NVIDIA Isaac Lab中訓練四足機器人運動

LIG Nex1收購四足機器人制造商Ghost Robotics
Al大模型機器人
小米機器人入駐小米汽車工廠,已研發(fā)鐵大、鐵蛋等機器人
全球機器人開發(fā)領域采用NVIDIA 機器人開發(fā)和生產(chǎn)
【項目展示】基于CW32的遙控循跡小車

CW32量產(chǎn)燒錄工具


基于樹莓派的四足噴水機器人設計

基于CW32的門禁綜合系統(tǒng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論