 物聯網系統中高精度RTK定位方案的實現_高精度定位模塊
物聯網系統中高精度RTK定位方案的實現_高精度定位模塊
物聯網系統中使用高精度定位模塊的原因主要體現在以下幾個方面:
提高定位精度
厘米級高精度:高精度定位模塊能夠實現厘米級甚至更高的定位精度,這對于許多物聯網應用來說是至關重要的。例如,在智能制造、倉儲物流等領域,精確的位置信息可以顯著提高生產效率和物流準確性。
降低誤差:相比傳統的定位技術,高精度定位模塊能夠顯著降低定位誤差,使得位置信息更加可靠和準確。
增強系統性能
快速響應:高精度定位模塊通常具有較快的響應速度,能夠實時更新位置信息,滿足物聯網系統對實時性的要求。
低功耗設計:許多高精度定位模塊采用低功耗設計,有助于延長物聯網設備的續航時間,降低能耗成本。
抗干擾能力強:在復雜的環境中,高精度定位模塊能夠抵抗各種干擾因素,如電磁干擾、多徑效應等,確保定位結果的準確性和穩定性。
滿足多樣化需求
適應多種場景:高精度定位模塊可以應用于多種物聯網場景,如室內定位、室外定位、車輛追蹤等,滿足不同行業和領域的需求。
提升用戶體驗:在智能家居、智慧城市等領域,高精度定位模塊可以為用戶提供更加精準和個性化的服務體驗,如基于位置的信息推送、導航服務等。
推動技術創新和應用發展
促進技術創新:高精度定位技術的發展推動了物聯網技術的不斷創新和升級,為物聯網系統提供了更加先進和高效的定位解決方案。
拓展應用領域:隨著高精度定位模塊在物聯網系統中的廣泛應用,其應用領域也在不斷拓展,如自動駕駛、無人機配送等新興領域。
具體應用領域介紹
除傳統測繪領域外,高精度位置服務在精細農業、智能駕考、無人機、通用航空、車聯網、自動駕駛等領域的高精度應用市場正在顯現出巨大的增長潛力。支持RTK算法的高精度定位模塊特別適用于對定位精度要求比較高的特定行業。

本文會再為大家詳解定位模塊家族中的一員——高精度定位模塊。
高精度定位模塊的背景
在室外場景,北斗、GPS 等 GNSS定位技術在持續的演變,精度越來越高,應用面也越來越廣。隨著新基建熱潮的到來,借助5G+新基建,無人駕駛、自動駕駛等技術正在逐步完善,對于定位的需求已經不僅僅只是粗略的軌跡,而是需要高精度的定位來提升用戶體驗,拓展商業模式,提升社會效率。
普通GPS定位模塊、北斗定位模塊會受到衛星端、傳播端、用戶端誤差影響,導致反饋的位置信息定位精度只能達到米級,而物聯網領域的自動駕駛、安防/無人機和消費電子等應用場景日益對室外定位提出更高精度的要求,比如1米左右,亞米級,分米級,厘米級。對于智能駕駛汽車來說,車道很窄,路邊障礙物之間的距離也更短。這意味著汽車要求的定位精度為10到30厘米。普通定位模塊并不能達到厘米級的定位精度,這就需要高精度定位技術。
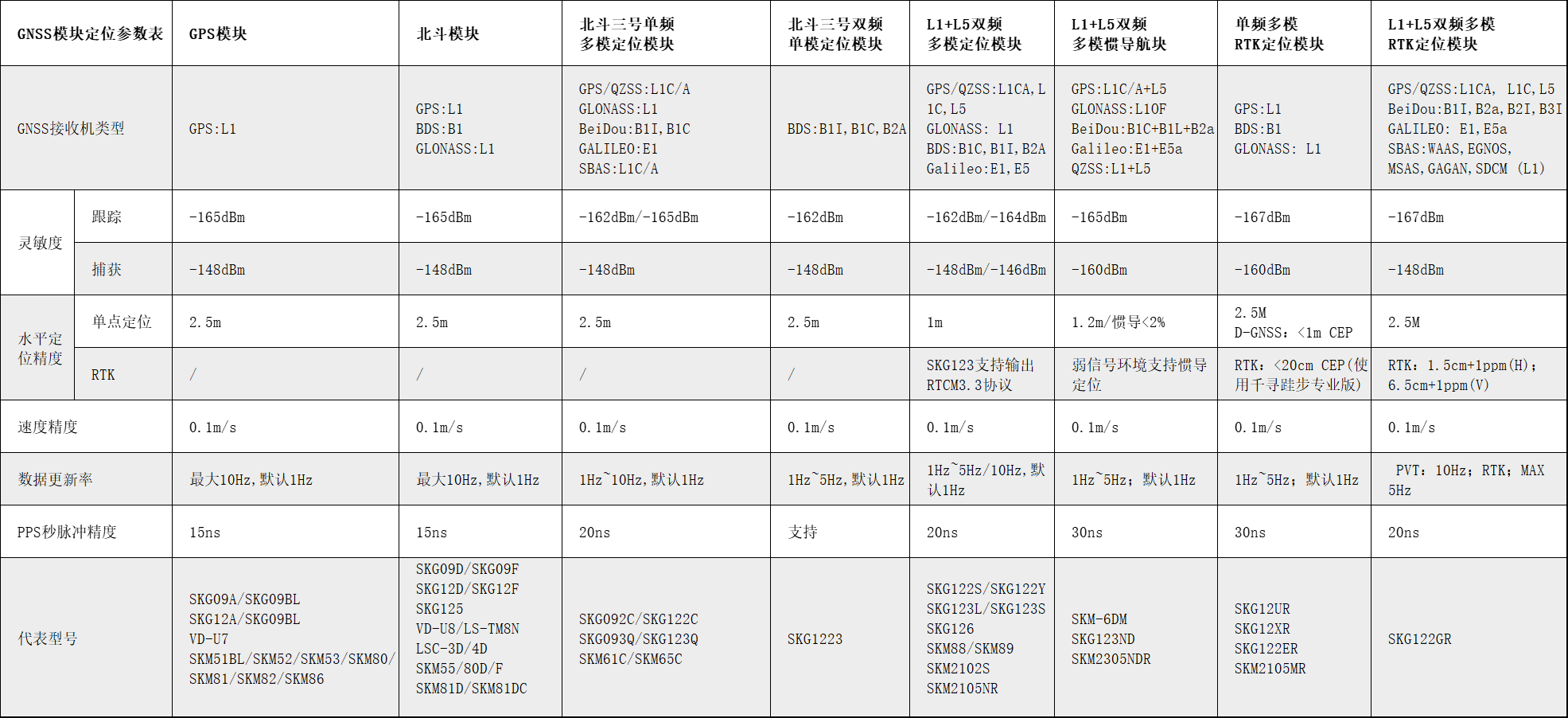
按照定位精度定位模塊可分為:
標準高精度定位模塊:通常能達到米級定位精度,適用于一般精度要求的場景。
RTK高精度定位模塊:利用實時動態差分技術,可以實現厘米級甚至毫米級的定位精度,特別適用于對精度要求極高的應用場景,如測繪、自動駕駛等
高精度RTK(Real - time kinematic,實時動態)定位模塊定義
高精度RTK(Real-time kinematic,實時動態)定位模塊是一種集成了高精度GNSS(全球導航衛星系統)接收器和實時差分定位技術的設備。它利用載波相位差分技術,通過實時處理基準站和移動站之間的衛星信號差異,來消除大部分公共誤差源(如衛星軌道誤差、電離層和對流層延遲等),從而實現厘米級甚至毫米級的定位精度
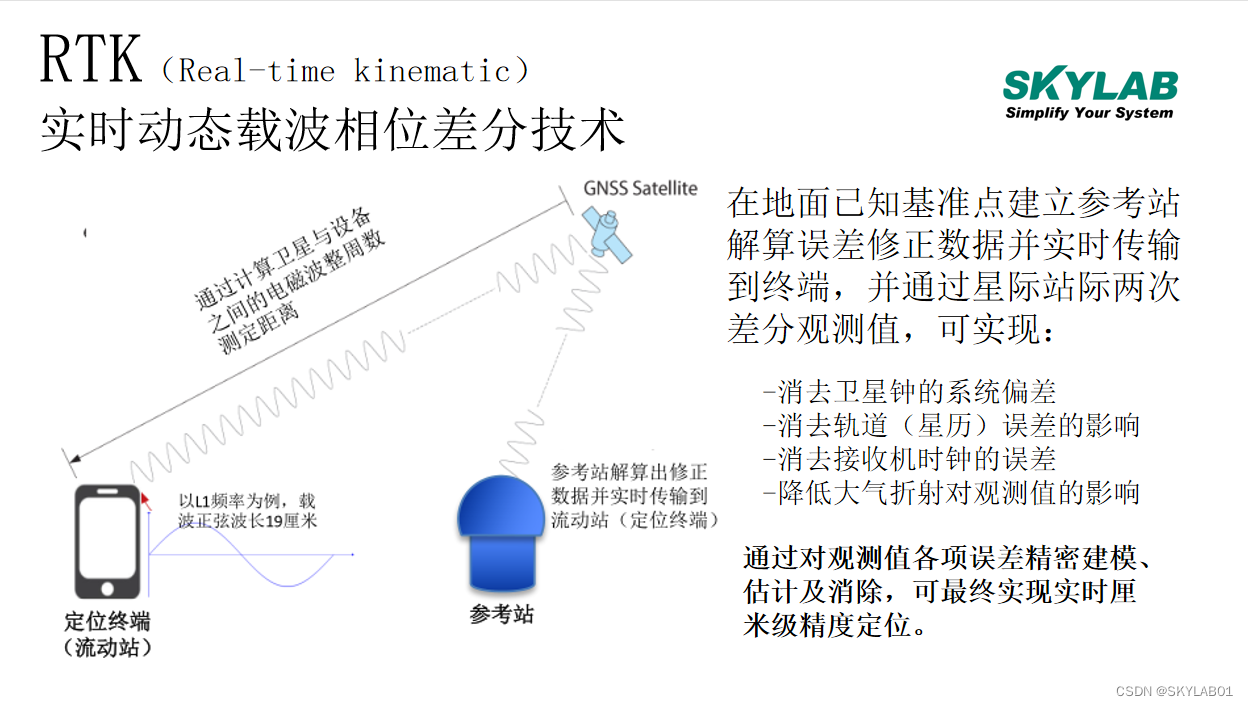
RTK定位技術工作原理
RTK(Real - time kinematic,實時動態)載波相位差分技術,是實時處理兩個測量站載波相位觀測量的差分方法,將基準站采集的載波相位發給用戶接收機,進行求差解算坐標。
這是一種新的常用的衛星定位測量方法,以前的靜態、快速靜態、動態測量都需要事后進行解算才能獲得厘米級的精度,而RTK是能夠在野外實時得到厘米級RTK定位精度的測量方法。
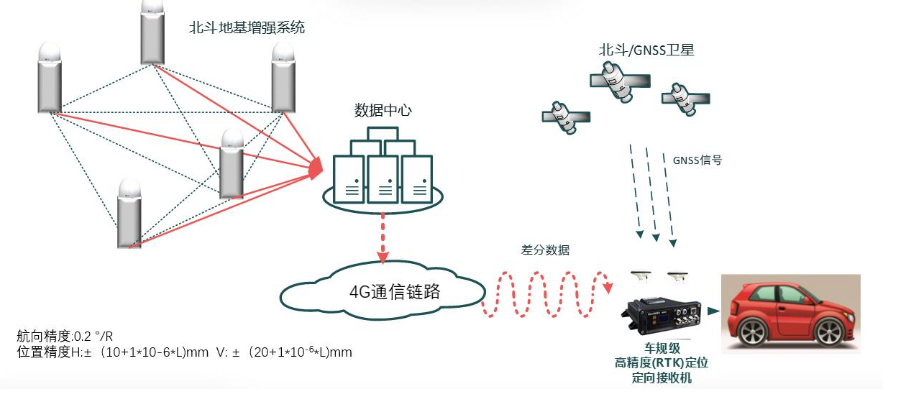
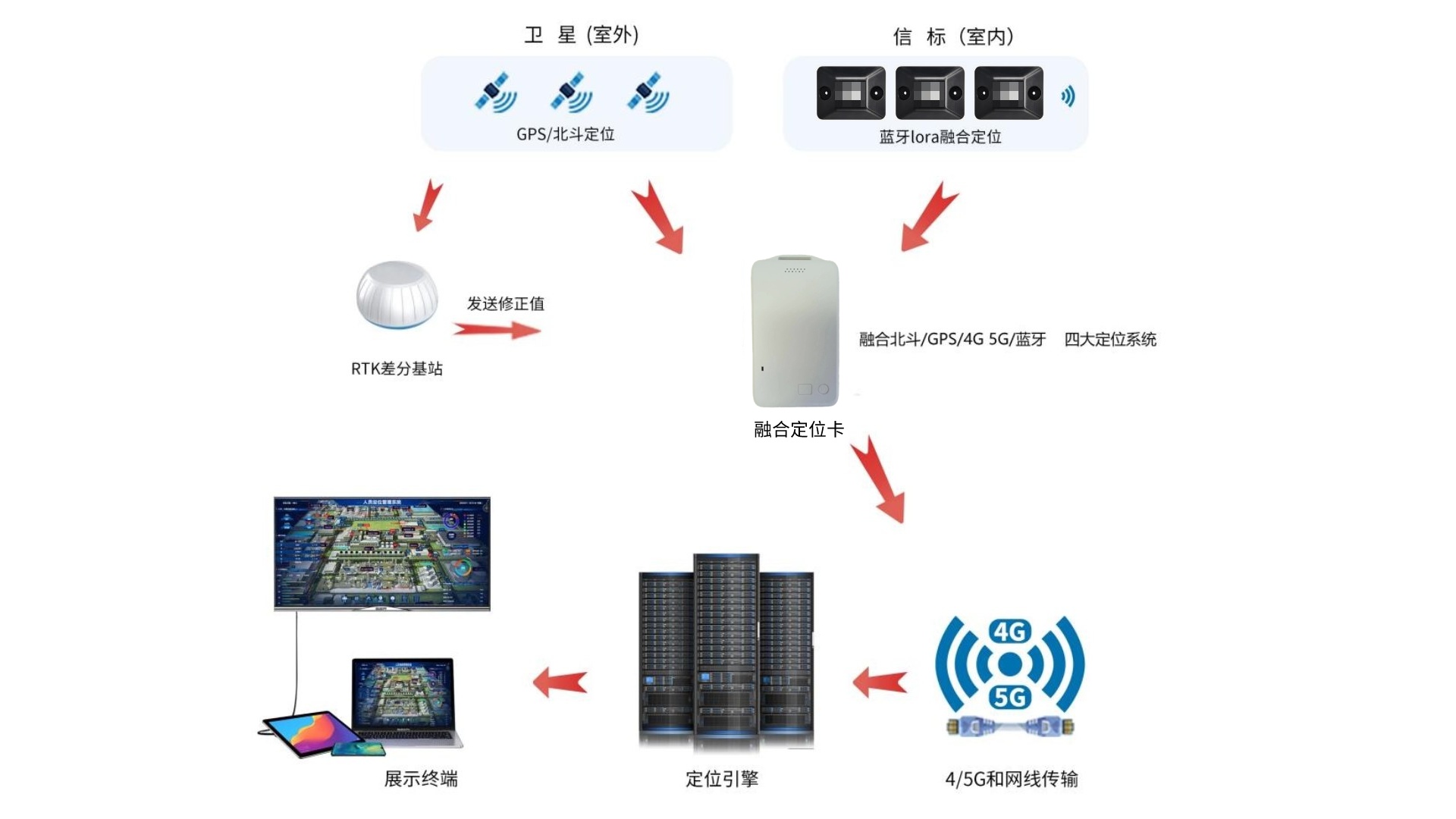
RTK高精度定位技術是GNSS系統獲取高精度實時動態定位的重要手段,RTK定位主要由三部分組成,分別是基準站接收機、移動站接收機以及兩站之間數據傳輸鏈路。RTK基準站將修正數據或采集的載波相位觀測值通過數據傳輸鏈路發送給建設在其數據傳輸范圍內的移動站,移動站接收機接收到的衛星觀測數據與基準站發送的數據進行相位差分定位的過程,即為RTK定位過程。
高精度RTK定位的工作原理是利用GPS信號的功率相位差測試技術。GPS數據信號到達信號接收器時,數據信號會在通信衛星后受到地球大氣層路面等各種因素的影響時發生相位變化。在沒有任何影響的情況下,可以檢測GPS信號的功率相位變化,但由于影響等各種因素的出現,單個信號接收器沒有獲得高性能的相位差信息內容。
高精度RTK的精確定位是將GPS信號接收器放置在已知區域的基準站,測量基準站與通信衛星之間的相位變化,獲取與基準站相比的位置信息內容。同時,當需要定位導航的移動網站上放置GPS信號接收器時,移動網站中的GPS信號接收器與基準站進行通信,將基準站精確測量獲得的整體相位差數據通信給移動網站中的GPS信號接收器。
移動網站中的GPS信號接收器可以將基準站與通信衛星之間的相位角和移動網站與通信衛星之間的相位角進行區分,從而獲得與基準站相比的移動網站的相位角,從而獲得高性能的定位信息。
RTK定位模塊簡介
RTK定位精度定位模塊能同時支持GPS、北斗、GLONASS、GALILEO、QZSS和SBAS的衛星接收模塊;內部集成了RTK解算算法,結合RTK服務可實現厘米級定位。通過配置可以使模組變為移動站。能滿足專業定位的嚴格要求與個人消費需要。
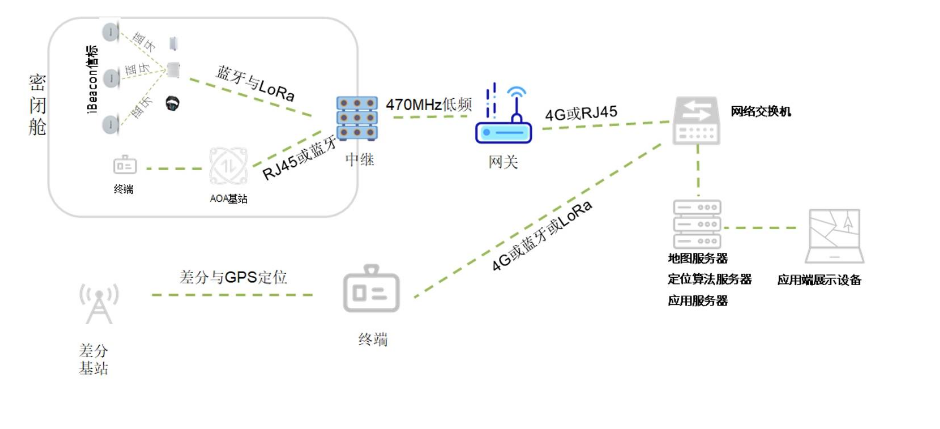
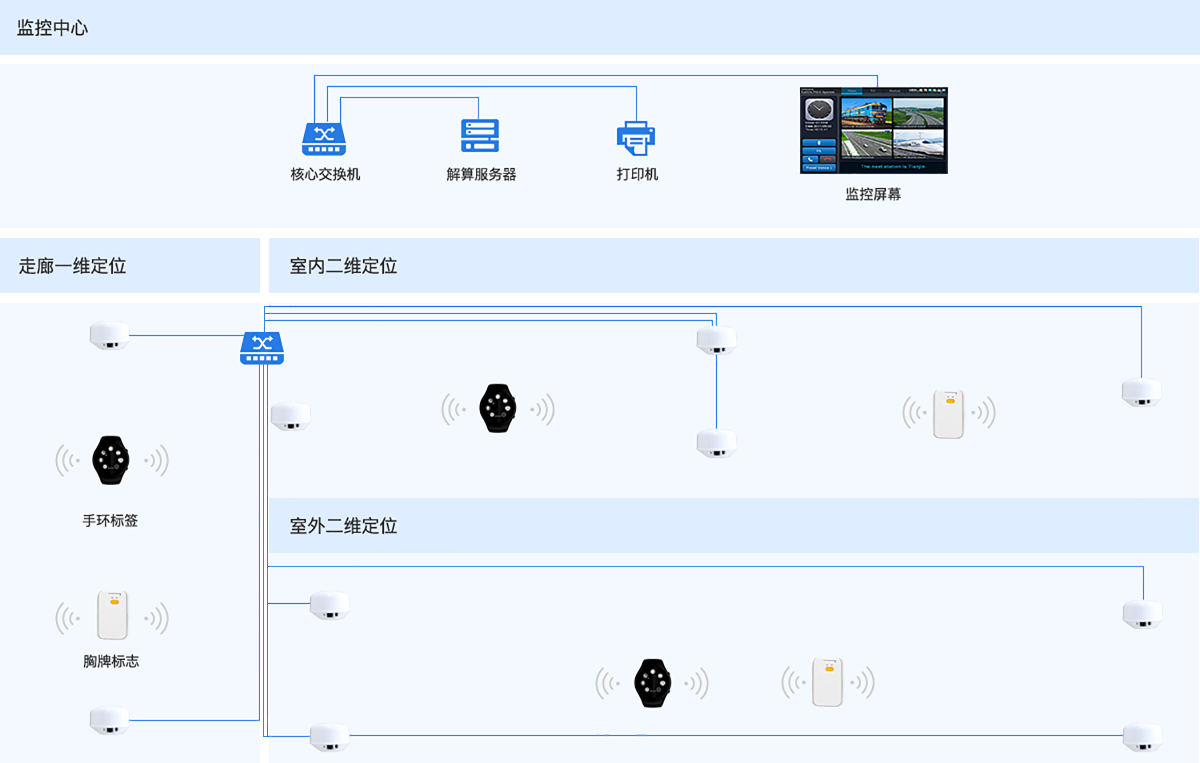
RTK定位精度定位模塊把原本復雜的RTK技術細節進行了合理的包封,用戶可以像使用普通單點定位GPS產品那樣直接使用,得到的卻是厘米級的定位精度。基于RTK定位模塊的厘米級精度室外定位解決方案,利用高精度定位技術,內置于終端產品/設備中的高精度定位模塊結合實際視圖情況,快速、準確定位其所在位置,管理員可通過管理平臺查看終端產品/設備的實時位置以及歷史行進軌跡。
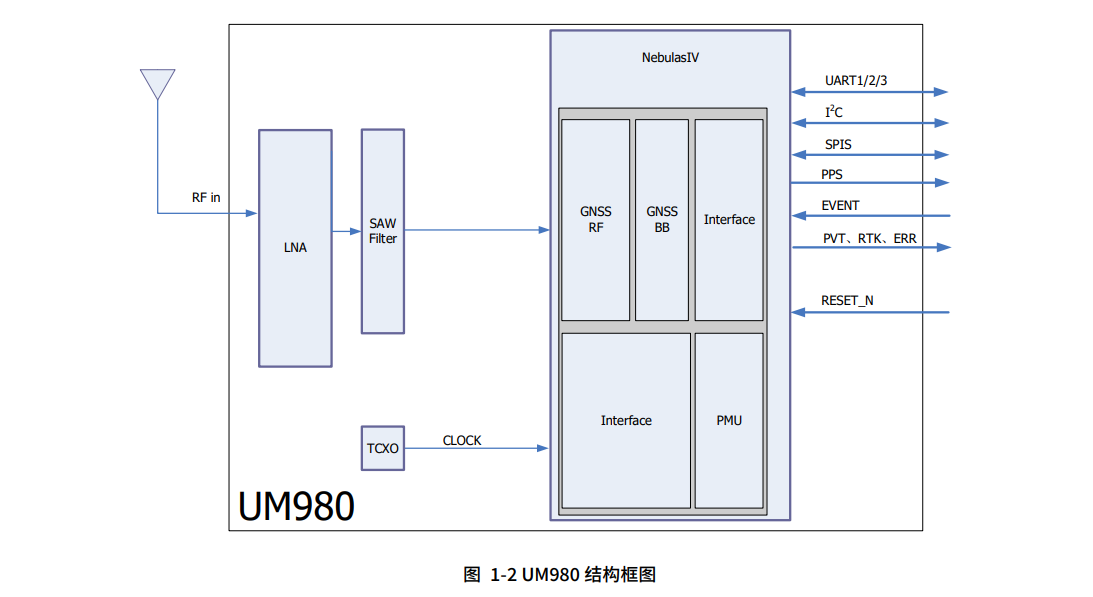
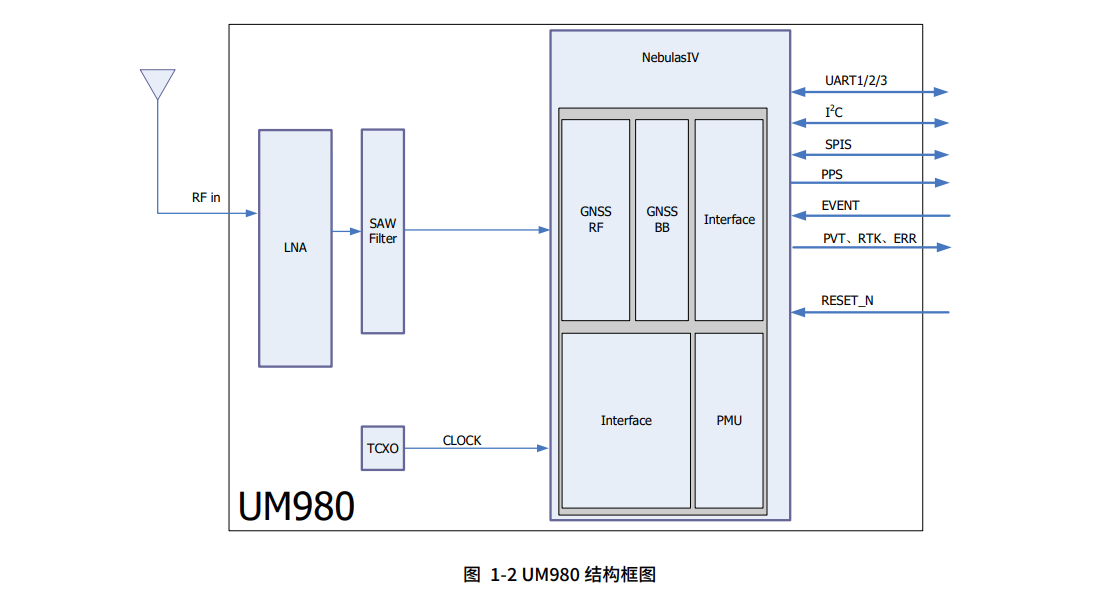
RTK定位模塊硬件介紹
以和芯星通UM980為例:主要接口包括:天線接口,UART以及其他接口
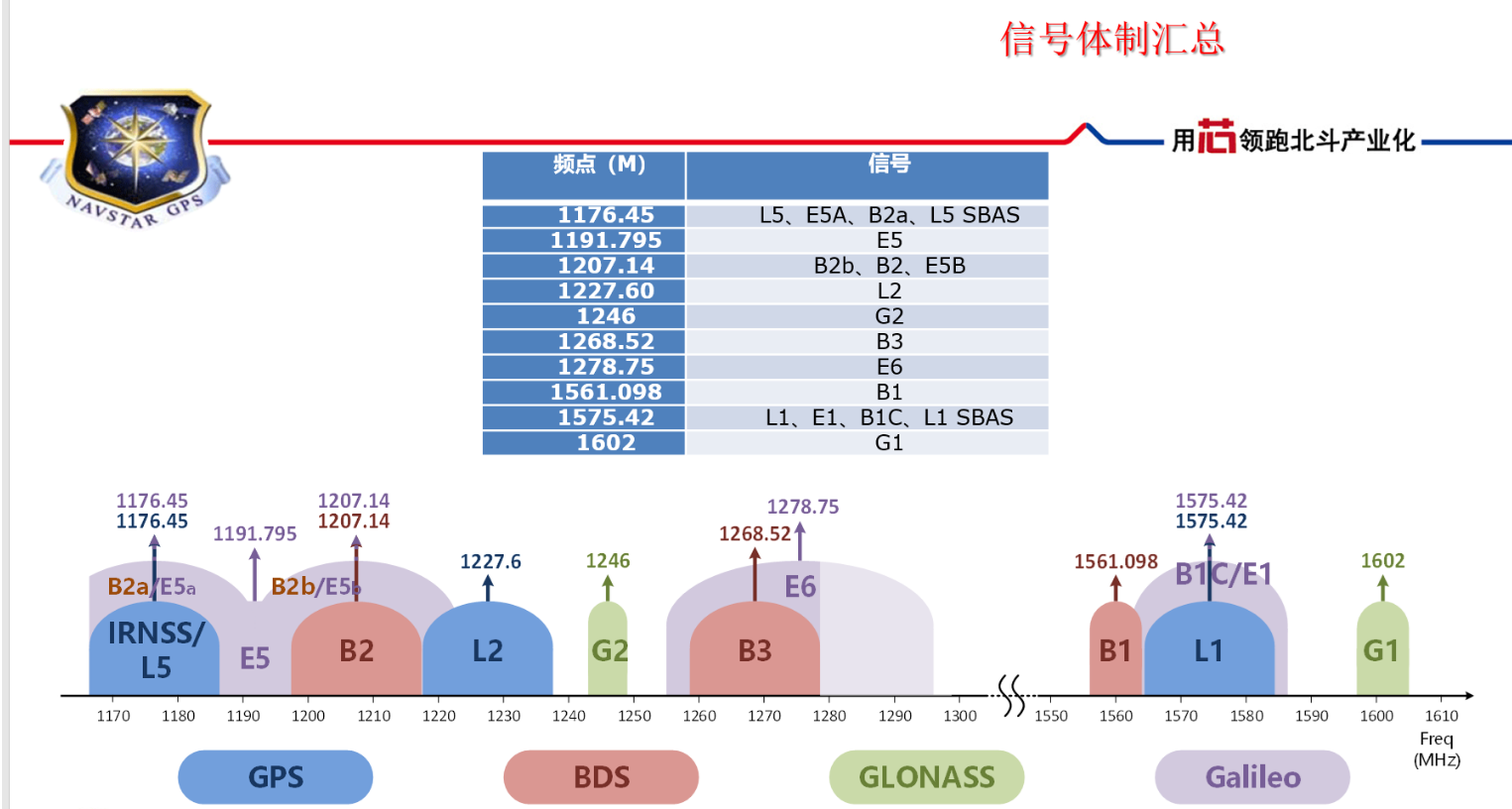
RTK定位模塊單頻信號與雙頻信號
GPS衛星信號分為L1和L2,頻率分別為1575.42MHZ和1228MHZ。北斗信號為:B1,B2,B3,頻率分別為1561.098MHZ,1207.12MHZ,以及1268.52MHZ. 接受信號是單頻還是雙頻卻決于RTK模塊,雙頻機通過接受兩組不同頻率的衛星信號,可以有效消除電離層的誤差。雙頻機對比與單頻機可以提供更為快速、更為精確、可靠的解算,但是價格相對昂貴。雙頻模組通常支持的頻段是:L1,B1,這樣設計天線比較方便.
RTK定位模塊的天線(GNSS,4G)
像天線這種東西,分類有很多種方法,但是任何東西,對于使用者最好是以功能分類。不同的天線的工作頻率不一樣,所以功能也不一樣。GPS天線的工作頻率是在1.2-1.6G左右,4G天線的工作頻段在1.7-2.7G之間,GPS天線有可能在4G的低頻段可以工作,但是高頻段的指標會很差。一般情況下是沒辦法共用的。
主流定位天線:
平面貼片天線
市面上普通陶瓷天線屬于此類
平面螺旋天線

四臂螺旋天線

四柱螺旋式天線由四條特定彎曲的金屬線條所組成,不需要任何接地,它具備有Zapper天線的特性,也具備垂直天線的特性。此種巧妙的結構,使天線任何方向都有3dB的增益,增加了衛星訊號接收的時間。四柱螺旋式天線擁有全面向360度的接收能力,因此在與PDA結合時,無論PDA的擺放位置如何,四柱螺旋式天線皆能收到信號,有別于使用平板GPS天線需要平放才能較好的接收效果。使用此種天線,當衛星出現于地平面上10度時,即可收到衛星所傳送的訊號。
蘑菇頭天線

蘑菇頭天線也被用于接收衛星信號,并將其傳輸到時鐘系統中進行精確的時間計量。這種天線的形狀設計和材料選擇能有效抑制多徑效應和噪聲干擾,提高信號接收的準確性和穩定性
定向天線

定向天線有區別于定位天線,有時需要同時使用,但對于移動物體,也可以軟件處理兩點的經緯度得到方向角
RTK定位模塊模式
目前的RTK模塊大都支持多模衛星信號,即可同時從GPS、北斗、伽利略收星
數據獲取及二次開發(串口輸出報文)
串口(UART)一般用于配置設備和數據讀取,我們通常通過ttl或485串口連接GPS模塊讀取GPS報文,做相應的本地開發,大多數參數可以從【GPS報文】中讀取,從而判斷定位狀態,格式如下:
$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,M,<10>,M,<11>,<12>*hh
<1> UTC時間,hhmmss.sss(時分秒)格式
<2> 緯度ddmm.mmmm(度分)格式(前面的0也將被傳輸)
<3> 緯度半球N(北半球)或S(南半球)
<4> 經度dddmm.mmmm(度分)格式(前面的0也將被傳輸)
<5> 經度半球E(東經)或W(西經)
<6> GPS狀態:0=未定位,1=非差分定位,2=差分定位,4=固定解算,5=浮動解算,6=正在估算 ;當GPS狀態達到4時,為最佳狀態,5為次佳
<7> 正在使用解算位置的衛星數量(00~N)(前面的0也將被傳輸)
<8> HDOP水平精度因子(0.5~99.9)
<9> 海拔高度(-9999.9~99999.9)
<10> 地球橢球面相對大地水準面的高度
<11> 差分時間(從最近一次接收到差分信號開始的秒數,如果不是差分定位將為空)
<12> 差分站ID號0000~1023(前面的0也將被傳輸,如果不是差分定位將為空)
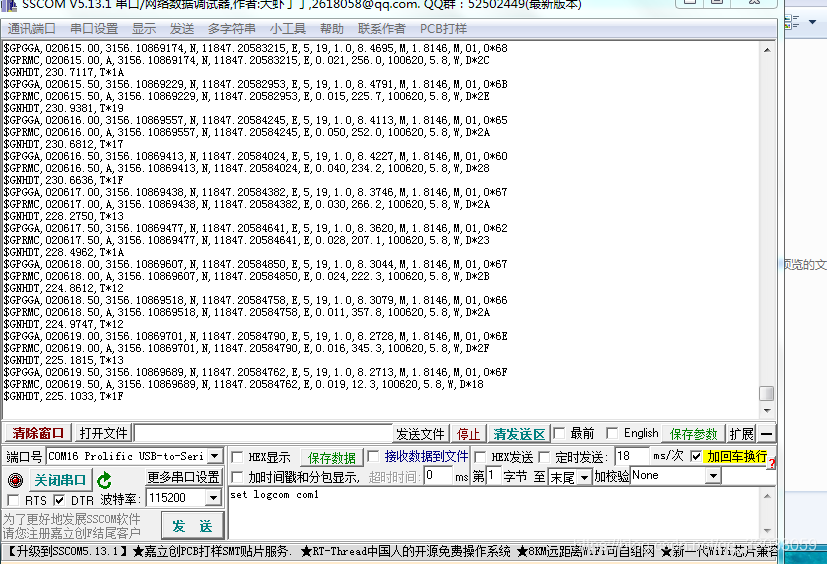
GNSS測試軟件工具界面
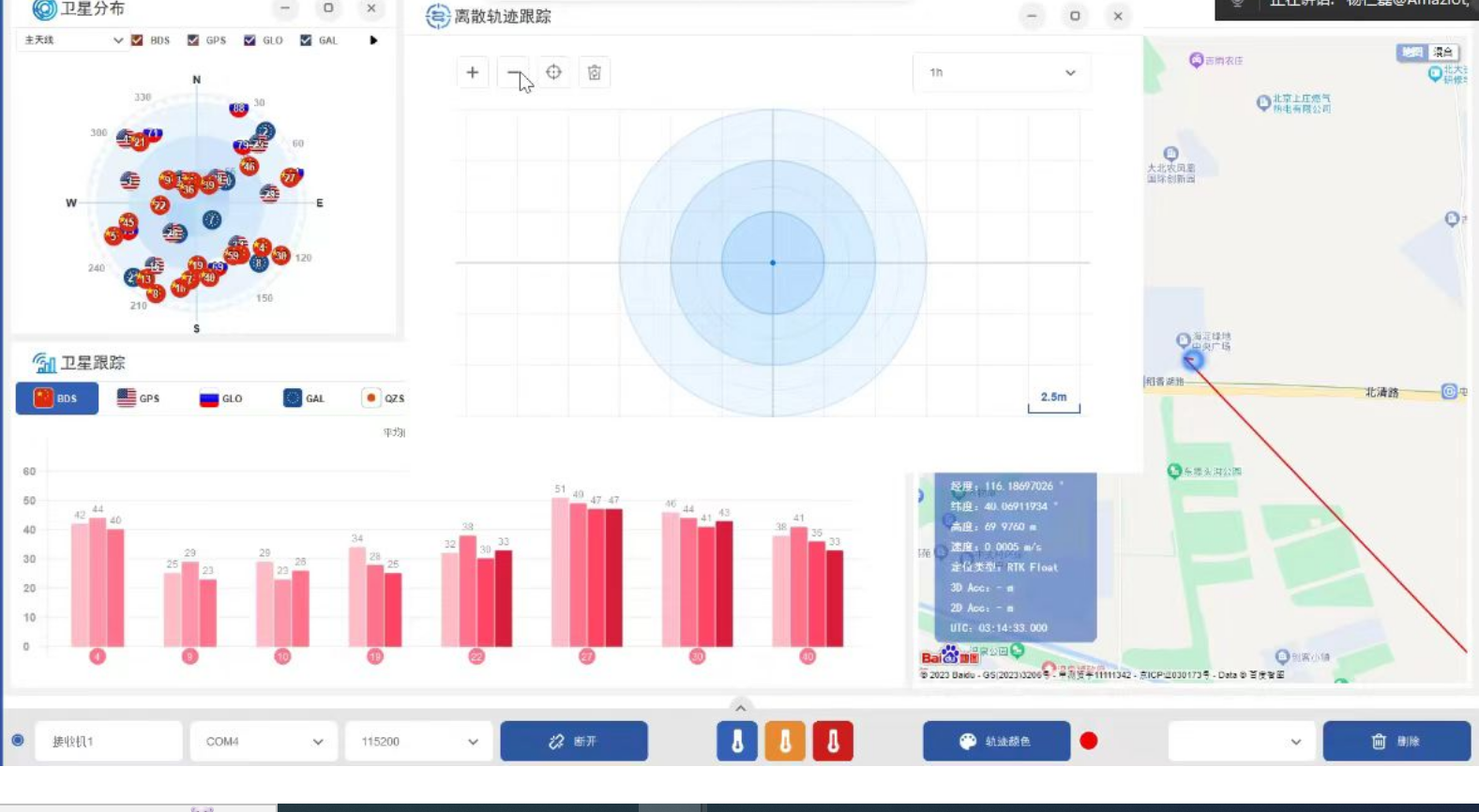
通過串口連接導航定位設備,可實時打印串口數據,分析并展示定位信息、搜星情況、衛星信號強度等關鍵信息,同時支持測試數據的抓取歸檔。另外還集成了一些小工具,如:NMEA/KML轉換、差分數據注入、指令配置管理等。
注意事項
RTK模塊定位質量受諸多因素影響,若未達到最佳解算狀態或精度不理想,可以嘗試以下手段:
檢查4G天線和GPS天線是否匹配、是否松動
檢查SIM卡是否欠費或松動
查看報文中的收星數,在空曠位置測試獲得更多收星,室內GPS是無法定位的,手機之所以可以在室內定位是因為結合了Wifi定位等技術
查看基站服務是否過期
RTK模塊GNSS參數
RTK技術優勢和局限性
RTK技術和差分GPS都是現代導航技術中的重要組成部分,它們都可以提供高精度的定位信息,但它們在優勢和局限性方面存在差異。
優勢:
RTK技術(Real-Time Kinematic)是一種通過接收基準站發射的范圍廣播信號進行差分計算,實現高精度定位的技術。RTK技術優勢在于其精度高,可以達到厘米級別。同時,由于基準站會不斷發送信號,所以其定位速度也相對較快,并且可以在復雜的環境中維持較高的精度,如建筑都市區域、山區等。
劣勢:
然而,RTK技術也存在一些不足之處。首先,其必須使用基準站,這就需要在使用的區域內建造基站,增加了使用成本和操作難度。其次,RTK在使用時可能會受到環境干擾,如高建筑物、天氣不好等,從而降低其精度。此外,RTK在無法獲取基準站信號時將無法工作。而提升地面參考基站的質量,數量和分布將有效提高RTK高精定位的服務方位和準確性.
主要廠家
RTK產品做的比較成熟的廠家,國外主要是天寶,國內主要是和芯星通、中海達、司南、華測和芯星通等
高精度RTK定位模塊應用場景
除傳統測繪領域外,高精度位置服務在精細農業、智能駕考、無人機、通用航空、車聯網、自動駕駛等領域的高精度應用市場正在顯現出巨大的增長潛力。支持RTK算法的高精度定位模塊特別適用于對定位精度要求比較高的特定行業。
供應商A:和芯星通
1、產品能力
(1)選型手冊
(2)主推型號1:UM980
對應的產品詳情介紹
UM980 是和芯星通自主研發的新一代 BDS/GPS/GLONASS/Galileo/QZSS 全系統全頻高精度 RTK 定位模塊,基于和芯星通自主研發的新一代射頻基帶及高精度算法一體化GNSS SoC 芯片—NebulasIV 設計。可同時跟蹤 BDS, GPS, GLONASS, Galileo, QZSS,NavIC, SBAS, L-Band* 等全系統全頻點。內嵌的多頻點抗干擾技術,完成增強的多模多頻 RTK 引擎解算,顯著改善城市街區和樹蔭等復雜環境下的 RTK 初始化速度、測量精度和可靠性。面向精準農業、測量測繪等高精度導航定位領域。
產品特點
● 基于最新一代 NebulasIV 射頻基帶及高精度算法一體化 GNSS SoC 芯片
● 全系統全頻RTK引擎及滿天星RTK技術
● 瞬時RTK初始化技術
● 60 dB窄帶抗干擾技術,支持干擾檢測
● 支持Heading2定向技術
● 支持STANDALONE單站高精度定位
● 支持B2b-PPP和E6-HAS
性能指標
物理特性
環境指標
功能接口
注:標注*部分為特定固件版本/硬件型號支持
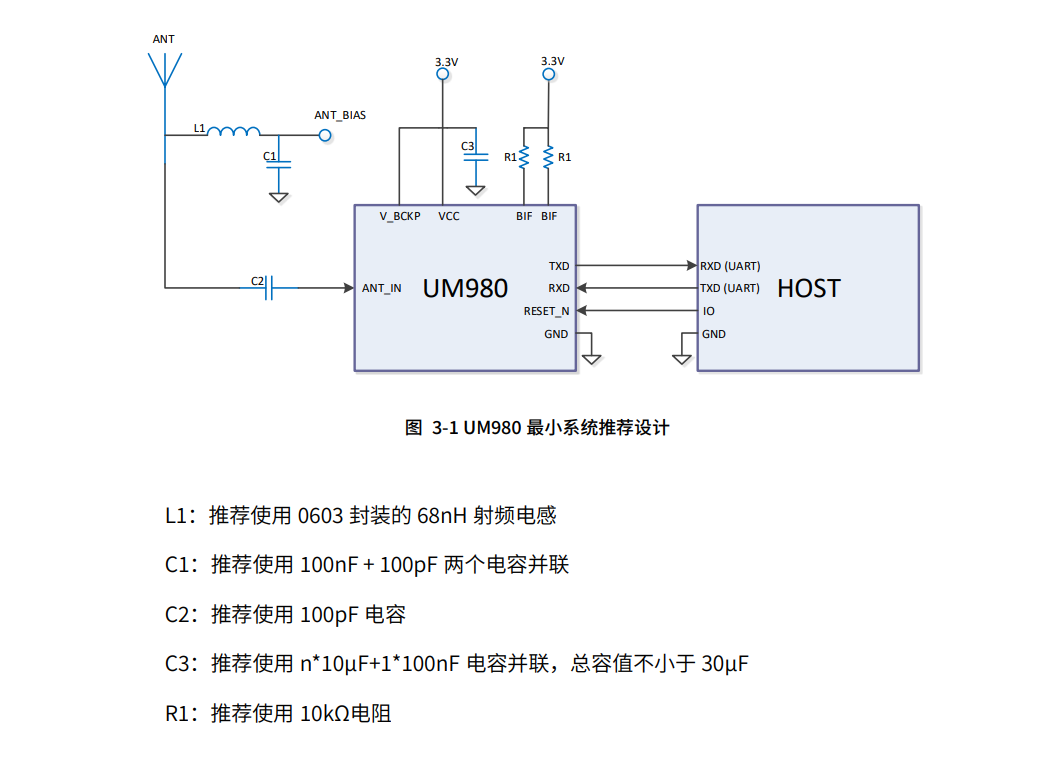
硬件參考設計
研發設計注意使用事項
1.天線饋電設計
UM980 不支持內部天線饋電,需要從模塊外部給天線饋電,建議盡量選擇高耐壓、大 功率的器件;還可以在饋電電路上增加氣體放電管、壓敏電阻、TVS 管等大功率的防護器件, 可有效提高防雷擊與防浪涌的能力。
如果 ANT_BIAS 天線饋電和模塊 VCC 主供電是相同的電源軌,則天線端引入的 ESD、 浪涌、過壓會加到模塊 VCC 主供電上,從而導致模塊的損壞。建議 ANT_BIAS 采用獨 立的電源軌,以降低模塊損壞的概率。
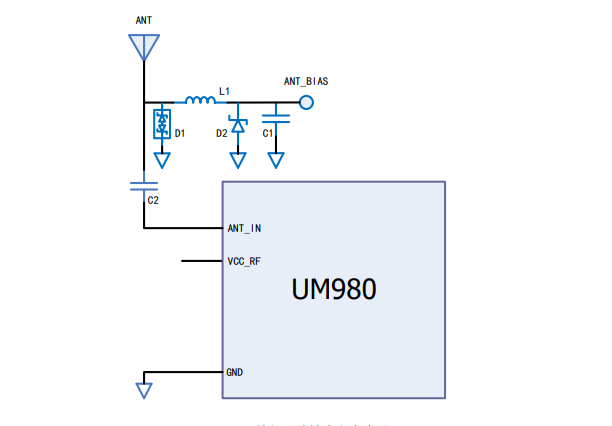
UM980 外部天線饋電參考電路
備注:
① L1:饋電電感,推薦 0603 封裝的 68nH 射頻電感
② C1:去耦電容,推薦各由 100nF/100pF 兩個電容并聯
③ C2:隔直電容,推薦 100pF 的電容
④ VCC_RF 不建議作為 ANT_BIAS 給天線饋電(因受限于模塊體積,VCC_RF 未做防 雷擊、防浪涌、過流保護處理)
⑤ D1:ESD 二極管,應選用支持高頻信號(2000MHz 以上)的 ESD 防護器件
⑥ D2:TVS 二極管,根據饋電電壓、天線耐壓等指標選擇鉗位特性達標的 TVS 管
2.模塊上電與下電 VCC
模塊 VCC 上電起始電平需要低于 0.4V。
模塊 VCC 上電電源坡道必須是單調的,不能有平緩處。
模塊 VCC 上電的下沖與振鈴需小于 5% VCC。
VCC 上電波形,從 10%到 90%的上升時間需在 100μs~1ms 范圍內。
上電時間間隔,模塊 VCC 下電低于 0.4V 后,到下一次開始上電,時間間隔需大于 500ms。 V_BCKP 模塊 V_BCKP 上電起始電平需要低于 0.4V。
模塊 V_BCKP 上電電源坡道必須是單調的,不能有平緩處。
模塊 V_BCKP 上電的下沖與振鈴需小于 5% V_BCKP。
V_BCKP 上電波形,從 10%到 90%的上升時間需在 100μs~1ms 范圍內。
上電時間間隔,模塊 V_BCKP 下電低于 0.4V 后,到下一次開始上電,時間間隔需大于 500ms。
3.接地與散熱
UM980 模塊中間矩陣形的 48 個焊盤用于接地與散熱,在 PCB 設計時須接到大面積地 平面上,以加強模塊散熱。
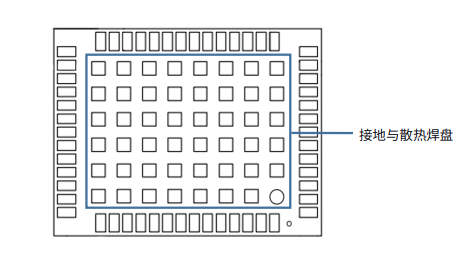
UM980 接地與散熱焊盤(底視圖)
4.PCB 封裝推薦設計
UM980 的 PCB 封裝推薦設計參見下圖。
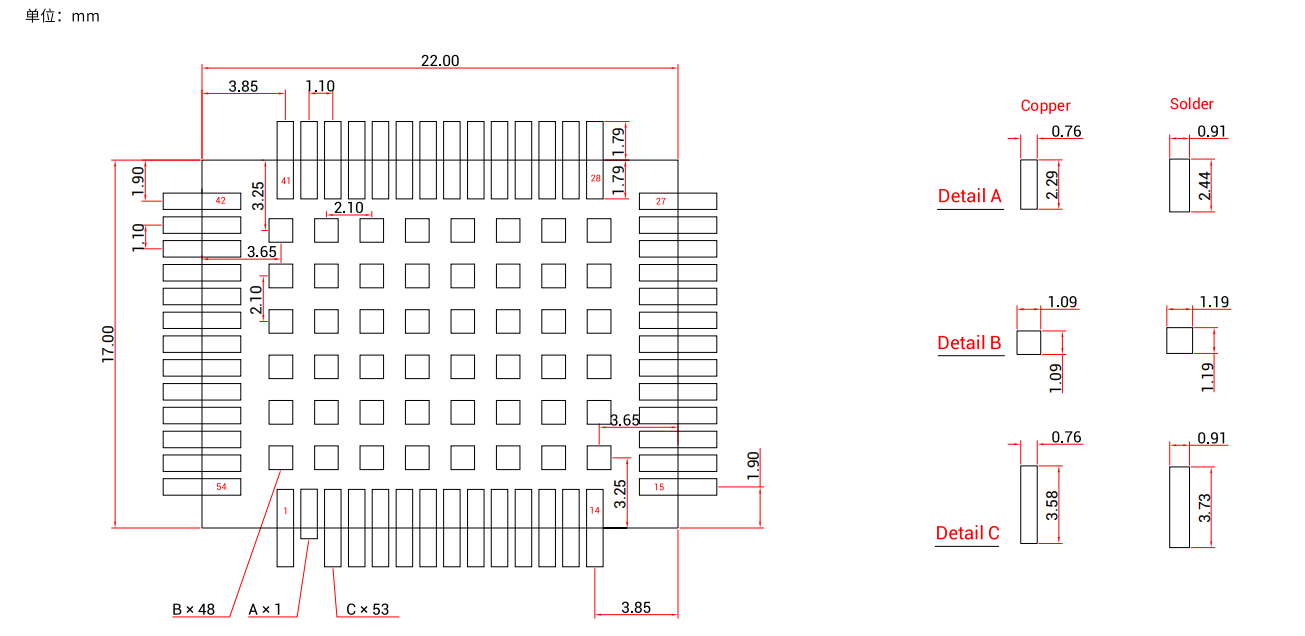
PCB 封裝推薦設計
說明: 為了方便測試,功能管腳焊盤設計的較長、超出模塊外框較多。
例如:
detail C 描述的焊盤超出模塊外框 1.79mm;
detail A 描述的焊盤超出模塊外框 0.50mm;因這些焊盤是射頻管腳,希望其在表層的 走線盡量短,減小外部干擾對射頻信號的影響,所以設計的適當短一些
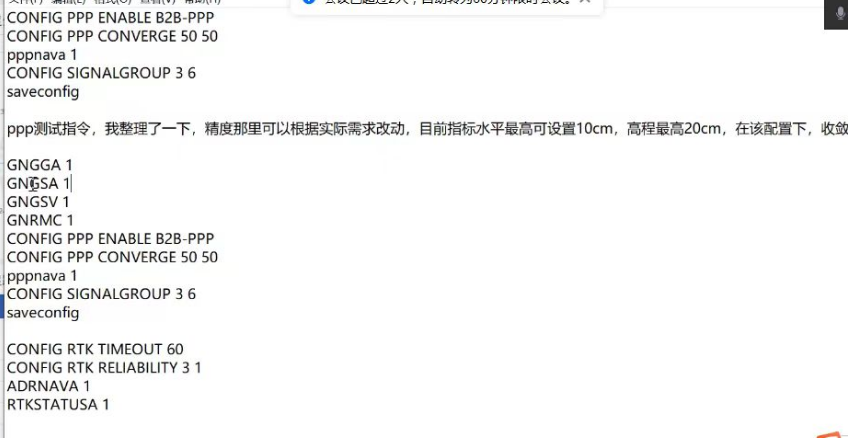
5.腳本測試指令
2、支撐
(1)技術產品
本文章源自奇跡物聯開源的物聯網應用知識庫Cellular IoT Wiki,更多技術干貨歡迎關注收藏Wiki:Cellular IoT Wiki 知識庫(https://rckrv97mzx.feishu.cn/wiki/wikcnBvAC9WOkEYG5CLqGwm6PHf)
歡迎同學們走進AmazIOT知識庫的世界!
這里是為物聯網人構建的技術應用百科,以便幫助你更快更簡單的開發物聯網產品。
Cellular IoT Wiki初心:
在我們長期投身于蜂窩物聯網 ODM/OEM 解決方案的實踐過程中,一直被物聯網技術碎片化與產業資源碎片化的問題所困擾。從產品定義、芯片選型,到軟硬件研發和測試,物聯網技術的碎片化以及產業資源的碎片化,始終對團隊的產品開發交付質量和效率形成制約。為了減少因物聯網碎片化而帶來的重復開發工作,我們著手對物聯網開發中高頻應用的技術知識進行沉淀管理,并基于 Bloom OS 搭建了不同平臺的 RTOS 應用生態。后來我們發現,很多物聯網產品開發團隊都面臨著相似的困擾,于是,我們決定向全體物聯網行業開發者開放奇跡物聯內部沉淀的應用技術知識庫 Wiki,期望能為更多物聯網產品開發者減輕一些重復造輪子的負擔。
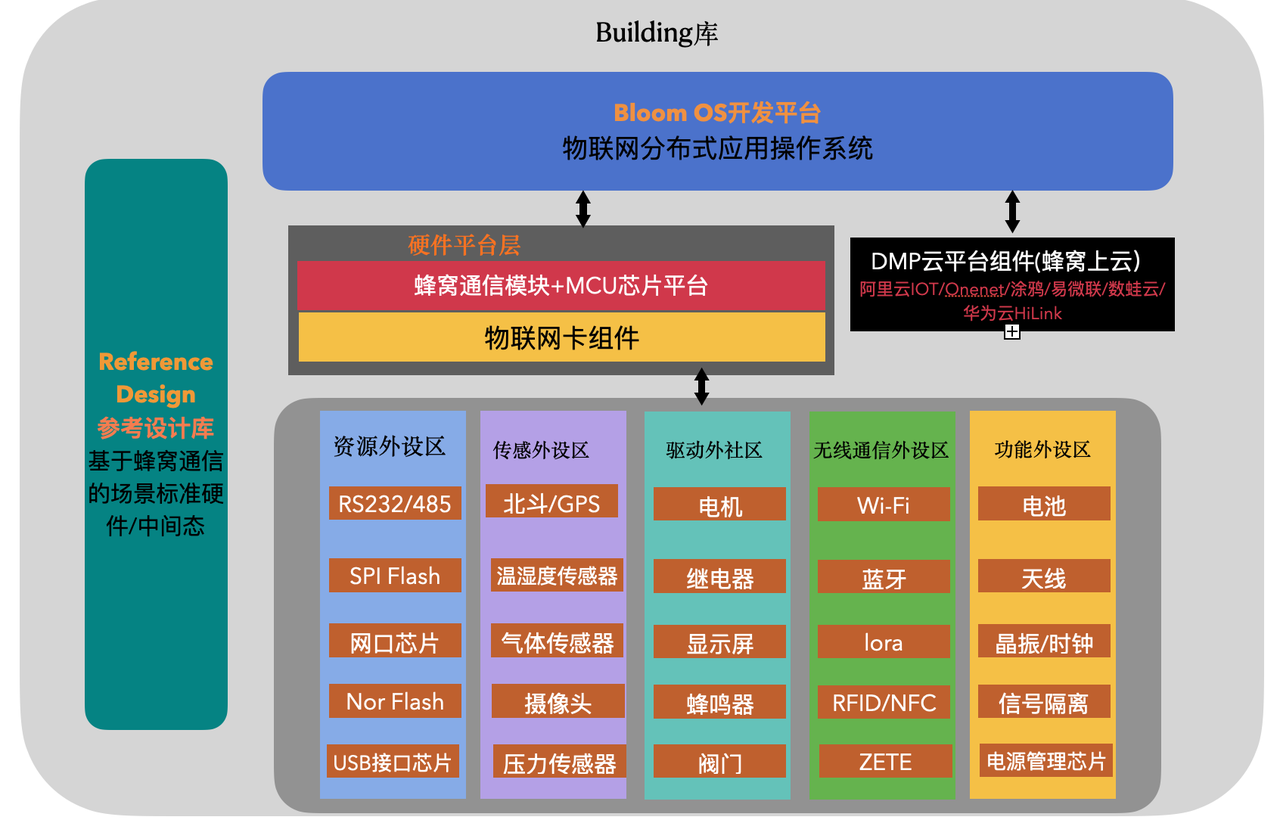
Cellular IoT Wiki沉淀的技術內容方向如下:
奇跡物聯的業務服務范圍:基于自研的NB-IoT、Cat1、Cat4等物聯網模組,為客戶物聯網ODM/OEM解決方案服務。我們的研發技術中心在石家莊,PCBA生產基地分布在深圳、石家莊、北京三個工廠,滿足不同區域&不同量產規模&不同產品開發階段的生產制造任務。跟傳統PCBA工廠最大的區別是我們只服務物聯網行業客戶。
連接我們,和10000+物聯網開發者一起降低技術和成本門檻
讓蜂窩物聯網應用更簡單~~
哈哈你終于滑到最重要的模塊了,
千萬不!要!劃!走!忍住沖動!~
歡迎加入飛書“開源技術交流群”,隨時找到我們哦~
點擊鏈接如何加入奇跡物聯技術話題群(https://rckrv97mzx.feishu.cn/docx/Xskpd1cFQo7hu9x5EuicbsjTnTf)可以獲取加入技術話題群攻略
Hey 物聯網從業者,
你是否有了解過奇跡物聯的官方公眾號“eSIM物聯工場”呢?
這里是奇跡物聯的物聯網應用技術開源wiki主陣地,歡迎關注公眾號,不迷路~
及時獲得最新物聯網應用技術沉淀發布
(如有侵權,聯系刪除)
審核編輯 黃宇
-
物聯網
+關注
關注
2909文章
44557瀏覽量
372776 -
定位
+關注
關注
5文章
1329瀏覽量
35357 -
RTK
+關注
關注
8文章
129瀏覽量
37511
發布評論請先 登錄
相關推薦
UWB人員定位系統:高精度定位技術的革新之作
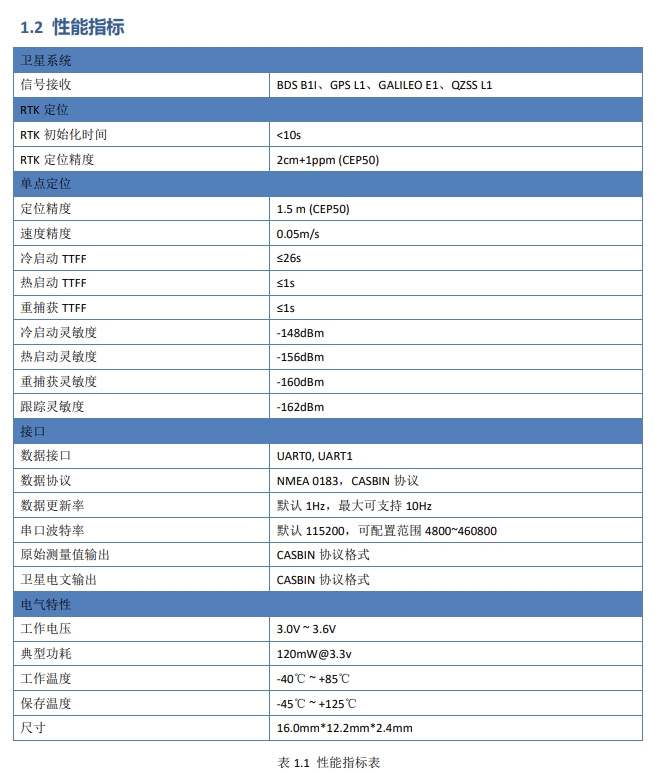
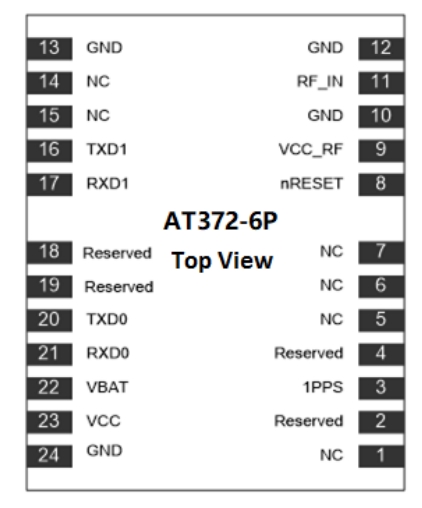
AT372-6P杭州中科微GNSS單頻RTK高精度定位模塊datasheet




移遠通信高精度定位模組LG290P實現批量交付
什么是高精度定位平板?
北斗高精度定位終端的工作原理和精度范圍

移遠通信推出工規級RTK高精度GNSS定位模組LG290P
移遠通信推出“全系統+全頻段”高精度GNSS定位模組LG290P,賦能高精度定位應用






 工商網監
工商網監
評論