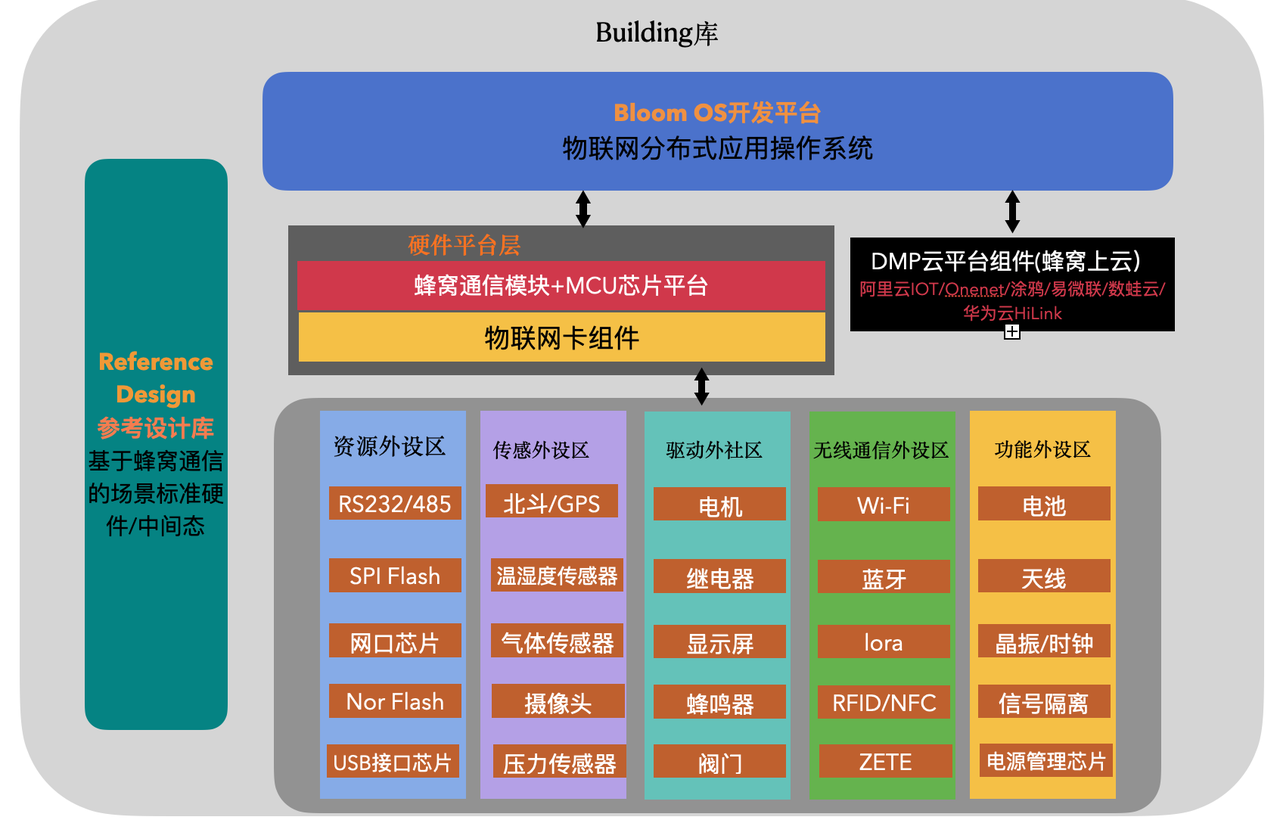
 三軸陀螺儀在物聯網系統中檢測重力加速度的方案分享
三軸陀螺儀在物聯網系統中檢測重力加速度的方案分享
物聯網系統中使用姿態傳感器是因為它們能夠提供高精度、實時性和可靠性的姿態測量數據,廣泛應用于航空航天、機器人技術、智能家居、安防監控等多個領域,為物聯網系統的發展提供了重要支持。姿態傳感器通常應用于以下場景:
航空航天:在航空航天領域,姿態傳感器用于實現精確的導航和飛行控制,確保飛行器的穩定性和安全性。
機器人技術:在機器人領域,姿態傳感器用于實時監測和控制機器人的姿態,實現精確的運動控制和姿態調整。
智能家居:在智能家居領域,姿態傳感器可以應用于智能門鎖、智能窗簾等設備中,通過感知用戶的姿態來實現自動控制和智能化操作。
安防監控:在安防監控領域,姿態傳感器可以用于人體姿態識別,通過實時監測人體的動作和姿態來預防潛在的安全風險。
例如:智能物聯網設備
電池供電設備通過加速度計進行姿態與運動檢測,充分利用加速度傳感器內部集成的硬件算法,能更好的平衡性能與耗電這個電池供電設備的重要需求。

電池供電的物聯網產品,部分采用不可充電的紐扣電池,而部分需要更強運算功能的需要采用可充電鋰電池,在有限的電池資源下如何延長電池壽命,對于傳感器部分,常用的方式通常有兩種:
采用超低功耗的微處理器,通過利用傳感器本身自帶的FIFO功能,減少微處理器周期喚醒的次數和喚醒時間。
利用傳感器本身的搭載的低功耗邊緣計算功能,最大限度的降低微處理器的功耗。
加速度計的運動狀態檢測常見的用途有:
檢測由靜到動,比如車輛防盜系統中可以用加速度計判定異常的震動;電表水表汽表檢測非法打開測量設備;手機里面依據震動加上角度判斷識別手機是否被用戶拿起了;車載視頻監控檢測到車輛啟動自動錄像操作,遙控器被拿起后進入快速連接狀態等等;
檢測由動到靜,主要是用于依靠這個狀態信息進行相應的控制,比如玩具如果在設定時間內是靜止的,自動關機節省電源等等;
檢測動的方式,比如TWS耳機或者電子煙上使用敲擊的方式來實現無按鍵控制,比如計步檢測,撞擊檢測,雙擊實現類似電源開關或者打開費電的射頻單元等等。
姿態傳感器優勢
小型設備應用:現代姿態傳感器傾向于微型化和集成化,可以在小型設備中實現高性能的姿態測量功能。這種微型特性使得姿態傳感器廣泛應用于移動終端、智能可穿戴設備等場景。
低功耗設計:姿態傳感器通常采用低功耗設計,延長了設備的續航時間,適用于需要長時間運行的物聯網系統。
實時性:姿態傳感器能夠實時輸出物體的姿態數據,為物聯網系統提供及時的反饋和控制信息。
可靠性:通過定期的錯誤校正和校準,姿態傳感器能夠保持其準確性和可靠性,確保物聯網系統的穩定運行。
本文會再為大家詳解傳感器家族中的一員——姿態傳感器。
姿態傳感器的定義
姿態傳感器是一種集成了多種傳感器技術的設備,主要用于實時測量和確定物體或系統的空間姿態信息。這些傳感器通常包括加速度計、陀螺儀和磁力計等,它們各自提供關于物體運動狀態的不同方面的數據。通過綜合處理這些數據,姿態傳感器能夠計算出物體相對于某一參考系(如地球或某個固定點)的方向、傾斜角度、旋轉速率等姿態參數
姿態傳感器的結構
姿態傳感器是基于MEMS(微機電系統)技術的高性能三維運動姿態測量系統,其內部結構通常包含以下幾個關鍵組件:
傳感器單元
三軸陀螺儀:用于測量物體繞三個軸的角速度,幫助跟蹤物體的旋轉方向和速度。
三軸加速度計:測量物體在三個軸向上的加速度,包括重力加速度,從而確定物體的傾斜角度。
三軸電子羅盤(或磁力計):測量地球磁場的方向,提供關于物體絕對方向的信息。
處理器單元
低功耗ARM處理器:負責接收來自傳感器單元的數據,進行溫度補償、數據融合和算法處理等,最終輸出校準過的姿態數據。數據處理與算法
基于四元數的三維算法:用于實時計算物體的姿態,包括方向、旋轉角度等,確保輸出的姿態數據具有高精度和穩定性。
特殊數據融合技術:如卡爾曼濾波算法等,用于將來自不同傳感器的數據進行融合處理,以消除噪聲和誤差,提高測量精度。
數據輸出接口:提供I2C、SPI、串口等多種接口,方便用戶根據自己的需求進行選擇和配置。
通信協議:支持標準的通信協議,確保與主控芯片或其他設備的穩定通信。
其他輔助模塊
電源模塊:為姿態傳感器提供穩定的電源供應。
溫度補償模塊:用于對傳感器數據進行溫度補償,消除溫度變化對測量精度的影響。
姿態傳感器的工作原理
傳感器數據采集
加速度計:
加速度計是一種能夠測量物體加速度的傳感器。它通常使用微機電系統(MEMS)技術,通過檢測物體在空間中的加速度變化來測量姿態角度的方向。加速度計可以測量物體在三個軸(X軸、Y軸、Z軸)上的加速度,包括重力加速度。根據物體的加速度信息,可以計算出姿態參數,如傾斜角度和旋轉角度。
以下圖為例,中間是一個具有一定質量,左右有彈簧的小滑塊,小滑塊移動時,滑塊上的電位器也跟著移動,通過電位器的電壓,就能夠知道滑塊的加速度值。這個加速度計實際上是一個彈簧測力計,根據牛頓第二定律F=ma,想要測量加速度a,只需要找一個單位質量的物體,測量它所受的力F就行了。

X、Y、Z軸都具有一個加速度計,以下面的圖為例,假設芯片里有6個測力的秤組成一個正方體,正方體內部放一個大小正好的單位質量小球,小球壓在一個面上,就會產生對應軸的數據輸出。如果壓在上面為正值,壓在下面為負值,6個面測的力就是3個軸的加速度值。
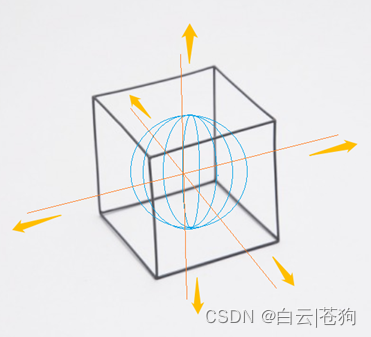
加速度計具有靜態穩定性,不具有動態穩定性。假設芯片向左傾斜放置,底面和左面都受力,求一個三角函數,就能得到向左的傾角。但是這個傾角只有在靜態時生效。因為加速度分重力加速度和運動加速度,如果此時芯片運動起來,這個三角函數的傾角就會受運動加速度的影響。(向前加速運動時,芯片的底面和左面也受力,無法判斷芯片的狀態是向左傾斜放置還是向前加速。)
陀螺儀:
陀螺儀是一種能夠測量物體旋轉速度的傳感器。它利用旋轉慣性原理,通過檢測物體繞不同軸的旋轉速度來測量姿態角度的速度和目標。陀螺儀的數據對于確定物體的旋轉方向和速度至關重要。
陀螺儀:一個旋轉物體的旋轉軸所指的方向在不受外力影響時,是不會改變的。
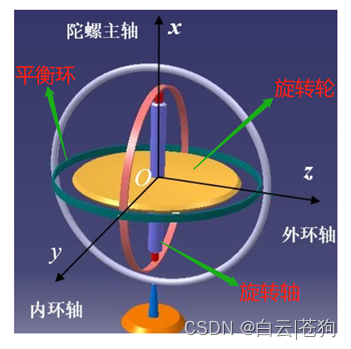
如圖所示,中間是一個有一定質量的旋轉輪,外面是3個軸的平衡環,當中間的旋轉輪高速旋轉時,根據角動量守恒原理,這個旋轉輪具有保持它原有角動量的趨勢。這個趨勢可以保持旋轉軸方向不變,當外部物體轉動時,內部的旋轉軸方向不會轉動。這會在平衡環連接處產生角度偏差,如果在連接處放一個電位器,測量電位器的電壓,就能得到角度了。
但是陀螺儀并不能直接測量角度。芯片內部的陀螺儀測量的時角速度,分別表示了此時芯片繞X、Y、Z軸旋轉的角速度。
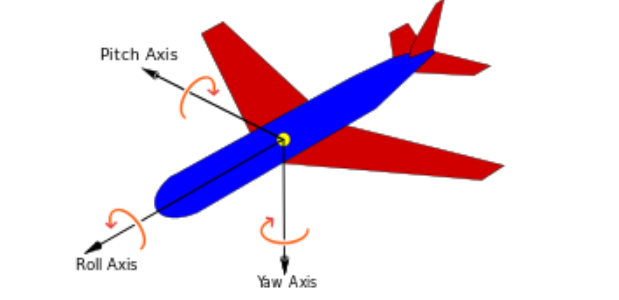
俯仰角θ(pitch):機體坐標系X軸與水平面的夾角。當X軸的正半軸位于過坐標原點的水平面之上(抬頭)時,俯仰角為正,否則為負。
偏航角ψ(yaw):機體坐標系xb軸在水平面上投影與地面坐標系xg軸(在水平面上,指向目標為正)之間的夾角,由xg軸逆時針轉至機體xb的投影線時,偏航角為正,即機頭右偏航為正,反之為負。
滾轉角Φ(roll):機體坐標系zb軸與通過機體xb軸的鉛垂面間的夾角,機體向右滾為正,反之為負。
對角速度進行積分,就可以得到角度。通過角速度積分得到的角度也有局限性,當物體靜止時,角速度會因為噪聲無法完全歸零,經過積分的累積,噪聲會導致計算出來的角速度產生緩慢的偏移。但是這個角度不會受物體運動的影響。
加速度計具有靜態穩定性,陀螺儀具有動態穩定性,這兩種傳感器的特性正好互補。所以取長補短,進行互補濾波,就能獲得穩定的姿態角了。
磁力計:
磁力計是一種可以測量地面磁場的傳感器。它利用物體周圍的地面磁場信息,通過檢測磁場方向和強度的變化來測量姿勢方向和視角。磁力計的數據用于提供關于物體絕對方向的信息,與加速度計和陀螺儀的數據相結合,可以進一步提高姿態測量的準確性。
磁力計是一種可以測量地面磁場的傳感器。它利用物體周圍的地面磁場信息,通過檢測磁場方向和強度的變化來測量姿勢方向和視角。磁力計通常與加速度計和陀螺儀等傳感器結合使用,以提供更準確的姿勢測量結果。
為了去除噪音和偏差,并獲得準確的姿態狀態,姿態傳感器通常會將上述多個傳感器導出的數據進行整合和過濾。
數據融合與算法處理
數據融合:姿態傳感器將加速度計、陀螺儀和磁力計等傳感器的數據進行融合處理。這通常通過復雜的算法來實現,如卡爾曼濾波算法等。數據融合的目的是消除傳感器之間的噪聲和誤差,提高測量精度和穩定性。
算法處理:基于四元數的三維算法是姿態傳感器中常用的算法之一。該算法利用四元數表示物體的旋轉和姿態,通過實時計算四元數的變化來跟蹤物體的姿態。此外,還有其他算法如歐拉角表示法、旋轉矩陣等也常用于姿態傳感器的數據處理中。
姿態輸出
經過數據融合和算法處理后,姿態傳感器可以輸出物體的姿態信息。這些信息通常以四元數、歐拉角或旋轉矩陣等形式表示,并可以通過I2C、SPI、串口等接口傳輸給主控芯片或其他設備。
硬件結構
如下圖所示為系統硬件總框圖
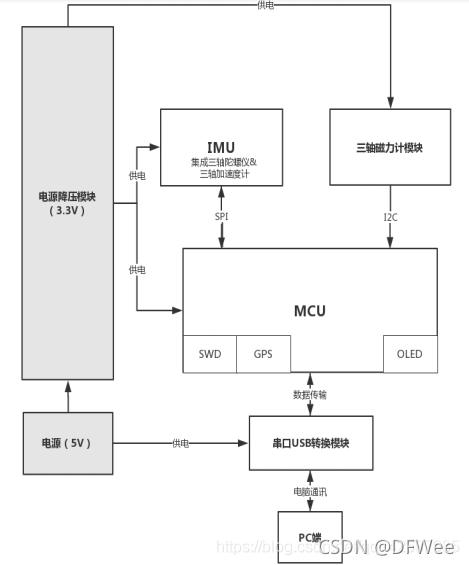
主要分為電源模塊、單片機模塊、磁傳感模塊、加速度傳感模塊和RS-232接口模塊。
軟件流程
如下圖所示為系統軟件總框架圖
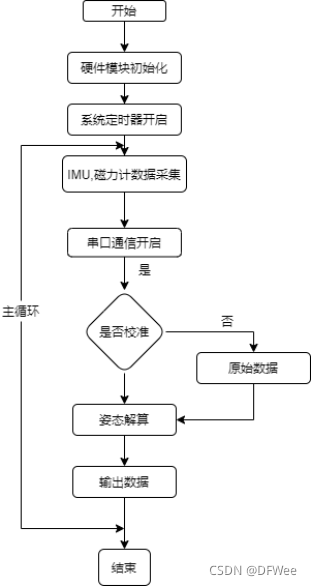
利用基于四元數的三維算法和特殊數據融合技術,實時輸出以四元數、歐拉角表示的零漂移三維姿態方位數據。主要可以分為初始化、采集、通信、解析、輸出等幾個環節,產品配套有成熟的上位機軟件可以很簡便地直接使用,并且可以根據需求進行功能或界面的修改。
姿態傳感器的分類
按集成傳感器類型分類
三軸加速度傳感器:主要測量物體在X軸、Y軸和Z軸三個方向上的加速度,通過加速度數據可以計算出物體的傾斜角度等姿態信息。
三軸陀螺儀:測量物體繞三個軸的角速度,幫助跟蹤物體的旋轉方向和速度。
三軸磁力計(電子羅盤):測量地球磁場的方向,提供關于物體絕對方向的信息。
六軸姿態傳感器:集成了三軸加速度計和三軸陀螺儀,能夠同時測量物體的加速度和角速度,從而更準確地計算物體的姿態。
九軸姿態傳感器:在六軸姿態傳感器的基礎上增加了三軸磁力計,能夠同時測量加速度、角速度和磁場信息,進一步提高了姿態測量的精度和穩定性。
按功能特性分類
高精度姿態傳感器:采用高精度傳感器和先進的數據處理算法,能夠提供高精度的姿態信息,適用于對測量精度要求較高的應用場景。
低功耗姿態傳感器:通過低功耗設計和優化算法,能夠在保證測量精度的同時降低功耗,延長設備的使用時間。
小型化姿態傳感器:采用先進的封裝技術和微型化設計,使得傳感器體積更小、重量更輕,便于在小型設備或嵌入式系統中使用。
按應用場景分類
航空航天姿態傳感器:用于飛機、火箭等航空航天器的姿態測量和控制,確保飛行安全。
機器人姿態傳感器:用于機器人的姿態感知和控制,實現機器人的自主導航和動作協調。
虛擬現實/增強現實姿態傳感器:用于跟蹤用戶的頭部和手部姿態,提供沉浸式的虛擬現實或增強現實體驗。
運動追蹤姿態傳感器:在運動追蹤系統中使用,實時測量運動員或運動物體的姿態信息,為運動分析和訓練提供數據支持。
醫療設備姿態傳感器:在醫療設備中用于監測患者的姿態和運動情況,為醫療診斷和治療提供輔助信息
姿態傳感器的使用注意事項
環境要求
避免強磁場:姿態傳感器對磁場敏感,應避免將其放置在磁力較大的區域,以防止磁場干擾導致數據異常。
適宜的溫度范圍:傳感器應在規定的溫度范圍內使用,避免在溫度過高或過低的環境中使用,以保證測量精度和穩定性。
連接與供電
正確連接:在連接姿態傳感器時,應確保傳感器與目標設備的連接穩固可靠,接口無松動。使用適當的電纜或接口進行連接,避免連接錯誤導致的數據傳輸問題。
穩定供電:傳感器的供電電壓應符合規定范圍,并確保電源穩定。避免電壓波動或電源不穩定對傳感器性能造成影響。
操作與設置
初始化與參數設置:在使用姿態傳感器之前,需要進行初始化操作,并根據目標設備的要求設置傳感器的相關參數。這包括設置測量范圍、采樣率、濾波方式等,以確保傳感器能夠正常工作并滿足應用需求。
選擇合適的測量模式:根據應用需求選擇合適的測量模式,如靜態測量、動態測量等。不同的測量模式對數據的處理和輸出方式有所不同,需要根據實際情況進行選擇。
數據處理與存儲
實時讀取數據:使用設備的軟件或編程接口實時讀取傳感器提供的姿態數據。確保數據的準確性和實時性,以便進行后續處理和分析。
數據備份與存儲:定期備份和存儲姿態數據,以防止數據丟失或損壞。同時,對重要數據進行加密處理,確保數據安全。
維護與校準
定期檢查與維護:定期檢查傳感器的連接接口、電纜等部件是否完好,確保傳感器處于良好的工作狀態。同時,注意傳感器的清潔和保養,避免灰塵和污垢對傳感器性能造成影響。
定期校準:定期進行傳感器的校準工作,以消除傳感器的偏差和誤差。校準過程應嚴格按照廠家提供的指南進行,確保校準結果的準確性和可靠性。
其他注意事項
避免液體接觸:避免將姿態傳感器與水或其他液體接觸,以防止傳感器內部電路受損或腐蝕。
注意用戶安全:在使用姿態傳感器時,應注意用戶安全。確保傳感器不會對人體造成傷害或不適,特別是在涉及高速旋轉或劇烈運動的應用場景中。
姿態傳感器的選型參數
測量范圍
加速度測量范圍:常見的范圍包括±2g、±4g、±8g、±16g等。根據應用場景的不同,選擇合適的加速度測量范圍以避免測量誤差。
角速度測量范圍:通常以度/秒(°/s)為單位,如±250°/s、±500°/s、±1000°/s、±2000°/s等。選擇適合應用需求的角速度測量范圍。
磁力計測量范圍(對于包含磁力計的傳感器):通常以微特斯拉(μT)為單位,如±4800μT、±1300μT等。
分辨率
分辨率決定了傳感器能夠檢測到的最小變化量。分辨率越高,測量精度越高,但成本也會相應增加。根據應用需求選擇合適的分辨率。
精度
精度是傳感器輸出值與實際值之間的偏差程度。選擇高精度的傳感器可以確保測量結果的準確性。
穩定性與漂移
穩定性:指傳感器在長時間工作過程中保持測量精度的能力。
漂移:指傳感器輸出值隨時間或環境條件變化而發生的偏移。選擇穩定性好、漂移小的傳感器可以提高系統的可靠性。
抗干擾能力
在嘈雜環境下,抗干擾能力強的傳感器能夠減少外部因素對測量結果的影響,提高測量精度。
通信協議
選擇與系統兼容的通信協議,如I2C、SPI等,以確保傳感器能夠順利與主控芯片或其他設備進行數據傳輸。
電源需求
考慮傳感器的電源需求,包括供電電壓、電流消耗等。確保系統能夠提供足夠的電源支持。
尺寸與重量
根據應用場景的空間限制和重量要求選擇合適的傳感器尺寸和重量。
附加功能
一些姿態傳感器還具備跌落檢測、超動態檢測等附加功能。根據應用需求選擇是否需要這些功能。
示例型號及參數
MPU6050:集成了三軸加速度計和三軸陀螺儀,加速度度量范圍±2g/±4g/±8g/±16g,角速度度量范圍±250°/s、±500°/s、±1000°/s、±2000°/s,接口類型I2C/SPI。
MPU9250:集成了三軸加速計、三軸陀螺儀和三軸磁力計,加速度度量范圍與MPU6050相同,角速度度量范圍也相同,磁力計測量范圍±4800μT,接口類型同樣為I2C/SPI。
BMX055:集成了三軸加速計、三軸陀螺儀和三軸磁力計,加速度度量范圍與上述型號相似,角速度度量范圍包括±125°/s、±250°/s等更寬的選擇,磁力計測量范圍±1300μT,接口類型也為I2C/SPI。
姿態傳感器的廠商
Honeywell
簡介:霍尼韋爾是一家在航空航天、工業自動化、安全系統等多個領域具有領先地位的跨國公司。其姿態傳感器產品以高精度、高穩定性和可靠性著稱,廣泛應用于航空航天、工業自動化等領域。
產品特點:可能包括高精度、高穩定性、低噪聲等特點,能夠滿足復雜環境下的姿態測量需求。
簡介:意法半導體是全球領先的半導體解決方案提供商之一,專注于模擬、微控制器和功率半導體等領域。其姿態傳感器產品種類豐富,性能優異,廣泛應用于消費電子、汽車電子等領域。
產品特點:可能包括集成度高、功耗低、性能穩定等特點,能夠滿足不同應用場景的需求。
簡介:InvenSense是一家專注于運動跟蹤解決方案的領先半導體公司,其產品在智能手機、平板電腦、可穿戴設備等消費電子產品中廣泛應用。InvenSense的姿態傳感器以其高性能和低功耗著稱。
產品特點:可能包括高精度、低功耗、快速響應等特點,能夠提供實時的姿態數據支持。
NXP Semiconductors(恩智浦半導體)
簡介:恩智浦半導體是一家全球領先的半導體公司,專注于高性能混合信號和標準產品解決方案。其姿態傳感器產品可能也具有一定的市場份額和競爭力。
產品特點:根據市場定位,可能具備高精度、高集成度等特點,適用于多種應用場景。
簡介:博世傳感器技術是博世集團旗下的子公司,專注于傳感器技術和解決方案的研發與生產。其姿態傳感器產品可能具有較高的精度和穩定性,廣泛應用于汽車、工業等領域。
產品特點:可能包括耐用性高、適應性強等特點,能夠滿足復雜環境下的姿態測量需求。
其他廠商
除了上述廠商外,還有如MEMSIC、ADI、Microstrain、KVH Industries等公司在姿態傳感器領域也具有一定的實力和市場份額。這些公司可能在不同的應用領域或技術方向上有所專長,為市場提供多樣化的姿態傳感器解決方案。
供應商A:上海矽睿科技股份有限公司(QST)
www.qstcorp.com
1、產品能力
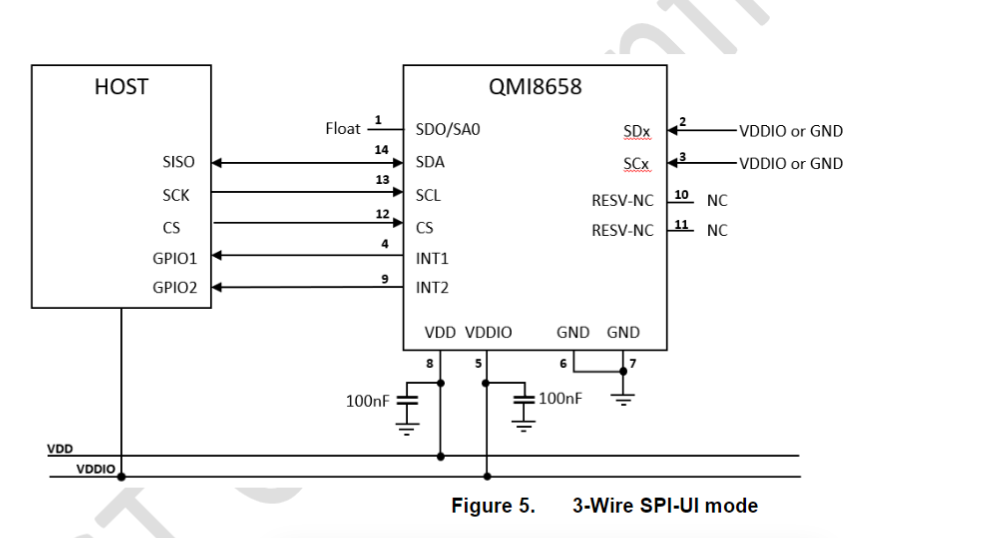
主推型號1:QMI8658
對應的產品詳情介紹
QMI8658是一款低噪聲、高帶寬的六軸慣性測量單元(IMU),包含一個三軸陀螺儀和一個三軸加速計,采用2.5 x 3.0 x 0.86 mm 14-pin LGA 封裝。支持多種通訊接口:I3C、I2C和SPI。內置AttitudeEngine,可滿足慣性導航高精度低功耗的要求,即使在低速率情況下的數據輸出也可保持高精度。
QMI8658帶自校準九軸傳感器融合和系統級定位精度,是高性能消費品和工業應用的理想選擇。
可應用于:智慧手機、智慧可穿戴設備、TWS耳機、游戲手柄、空鼠、無人機、掃地機器人、攝像頭、升降桌、二輪電動車、投影儀、平板、T-box等,實現運動姿態解算,手勢或頭部姿勢識別與追蹤,傾斜角度檢測等作用。
產品特點
· 高集成、小尺寸的封裝形式:2.5 x 3.0 x 0.86 mm 14- pin LGA
· 低噪聲:陀螺儀低噪聲15 mdps/√Hz與低延遲
· 接口可靈活選擇:支持MIPI? I3C, I2C, 和 3-wire 或 4-wire SPI
· 陀螺儀動態范圍±16°/s 至 ±2048°/s, 加速度計動態范圍±2 g 至 ±16 g
· 運行溫度范圍廣:-40°C~85°C,在高低溫環境中,保持靈敏度
· 內置溫度傳感器與補償算法
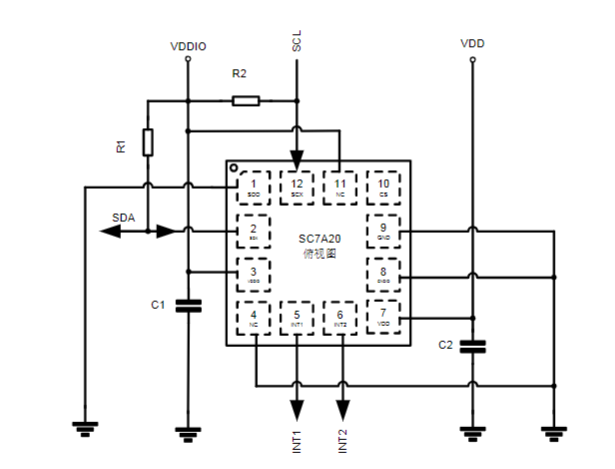
硬件參考設計
2、支撐
技術產品
供應商B:Invensense
https://invensense.tdk.com/
1、產品能力
(1)選型手冊
https://invensense.tdk.com/smartmotion/
(2)主推型號1: MPU6050
對應的產品詳情介紹
MPU6050是InvenSense推出的集成6軸運動處理組件,即三軸MEMS陀螺儀傳感器和三軸MEMS加速度傳感器,相較于多組件方案,集成模塊可以免除各個組件時間軸之差的問題,還能大大減小封裝的空間。它含有一個副IIC接口,可用于連接外部磁力傳感器,利用自帶數字運動處理器(DMP,Digital Motion Processor的縮寫)硬件加速引擎,通過主IIC接口,可以向應用端輸出完整的9軸姿態融合演算數據。
MPU6050 的特點
① 以數字形式輸出 6 軸或 9 軸(需外接磁傳感器)(注2)的旋轉矩陣、四元數(quaternion)、歐拉角格式(Euler Angle forma)的融合演算數據(需 DMP 支持)。
② 具有 131 LSBs/°/sec 敏感度與全格感測范圍為±250、±500、±1000 與±2000°/sec 的 3 軸角速度感測器(陀螺儀)。
③ 集成可程序控制,范圍為±2g、±4g、±8g 和±16g 的 3 軸加速度傳感器。
④ 移除加速器與陀螺儀軸間敏感度,降低設定給予的影響與感測器的飄移。
⑤ 自帶數字運動處理引擎可減少MCU復雜的融合演算數據、感測器同步化、姿勢感應等的負荷。
⑥ 內建運作時間偏差與磁力感測器校正演算技術,免除了客戶須另外進行校正的需求。
⑦ 自帶一個數字溫度傳感器。
⑧ 帶數字輸入同步引腳(Sync pin)支持視頻電子影像穩定技術與 GPS。
⑨ 可程序控制的中斷(interrupt),支持姿勢識別、搖攝、畫面放大縮小、滾動、快速下降中斷、high-G 中斷、零動作感應、觸擊感應、搖動感應功能。
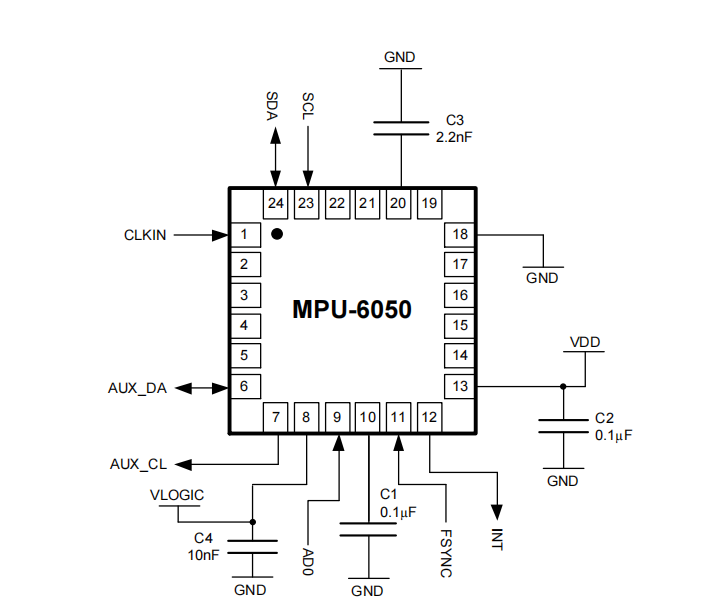
⑩ VDD 供電電壓為 2.5V±5%、3.0V±5%、3.3V±5%;VLOGIC 可低至 1.8V± 5%。
? 陀螺儀工作電流:5mA。
? 自帶 1024 字節 FIFO,有助于降低系統功率。
? 400Khz 的 IIC 通信接口。
注2:三軸 = 3軸陀螺儀
六軸 = 3軸加速度計 + 3軸陀螺儀
九軸 = 3軸加速度計 + 3軸陀螺儀 + 3軸磁力計

硬件參考設計
核心料(哪些項目在用)
奇跡物聯叉車監控項目
2、支撐
技術產品
技術資料
本文章源自奇跡物聯開源的物聯網應用知識庫Cellular IoT Wiki,更多技術干貨歡迎關注收藏Wiki:Cellular IoT Wiki 知識庫(https://rckrv97mzx.feishu.cn/wiki/wikcnBvAC9WOkEYG5CLqGwm6PHf)
歡迎同學們走進AmazIOT知識庫的世界!
這里是為物聯網人構建的技術應用百科,以便幫助你更快更簡單的開發物聯網產品。
Cellular IoT Wiki初心:
在我們長期投身于蜂窩物聯網 ODM/OEM 解決方案的實踐過程中,一直被物聯網技術碎片化與產業資源碎片化的問題所困擾。從產品定義、芯片選型,到軟硬件研發和測試,物聯網技術的碎片化以及產業資源的碎片化,始終對團隊的產品開發交付質量和效率形成制約。為了減少因物聯網碎片化而帶來的重復開發工作,我們著手對物聯網開發中高頻應用的技術知識進行沉淀管理,并基于 Bloom OS 搭建了不同平臺的 RTOS 應用生態。后來我們發現,很多物聯網產品開發團隊都面臨著相似的困擾,于是,我們決定向全體物聯網行業開發者開放奇跡物聯內部沉淀的應用技術知識庫 Wiki,期望能為更多物聯網產品開發者減輕一些重復造輪子的負擔。
Cellular IoT Wiki沉淀的技術內容方向如下:
奇跡物聯的業務服務范圍:基于自研的NB-IoT、Cat1、Cat4等物聯網模組,為客戶物聯網ODM/OEM解決方案服務。我們的研發技術中心在石家莊,PCBA生產基地分布在深圳、石家莊、北京三個工廠,滿足不同區域&不同量產規模&不同產品開發階段的生產制造任務。跟傳統PCBA工廠最大的區別是我們只服務物聯網行業客戶。
連接我們,和10000+物聯網開發者一起降低技術和成本門檻
讓蜂窩物聯網應用更簡單~~
哈哈你終于滑到最重要的模塊了,
千萬不!要!劃!走!忍住沖動!~
歡迎加入飛書“開源技術交流群”,隨時找到我們哦~
點擊鏈接如何加入奇跡物聯技術話題群(https://rckrv97mzx.feishu.cn/docx/Xskpd1cFQo7hu9x5EuicbsjTnTf)可以獲取加入技術話題群攻略
Hey 物聯網從業者,
你是否有了解過奇跡物聯的官方公眾號“eSIM物聯工場”呢?
這里是奇跡物聯的物聯網應用技術開源wiki主陣地,歡迎關注公眾號,不迷路~
及時獲得最新物聯網應用技術沉淀發布
(如有侵權,聯系刪除)
審核編輯 黃宇
-
陀螺儀
+關注
關注
44文章
783瀏覽量
98665 -
物聯網
+關注
關注
2909文章
44557瀏覽量
372768
發布評論請先 登錄
相關推薦
愛普生(EPSON)陀螺儀傳感器的特點和應用領域介紹






 工商網監
工商網監
評論