") 正弦波控制器速度怎么解碼
正弦波控制器速度怎么解碼
正弦波控制器,也稱為正弦波驅(qū)動(dòng)器,是一種用于控制電機(jī)速度的電子設(shè)備,它通過生成正弦波形的電壓或電流來驅(qū)動(dòng)電機(jī)。這種控制器通常用于無刷直流電機(jī)(BLDC)和永磁同步電機(jī)(PMSM),因?yàn)樗鼈兛梢蕴峁└咝屎土己玫膭?dòng)態(tài)響應(yīng)。
1. 正弦波控制器的基本原理
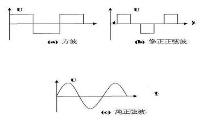
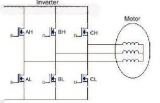
正弦波控制器通過生成三相正弦波電壓來驅(qū)動(dòng)電機(jī)。這些電壓與電機(jī)的轉(zhuǎn)子位置同步,以確保電機(jī)的轉(zhuǎn)子以恒定的速度旋轉(zhuǎn)。
2. 控制策略
正弦波控制器通常采用矢量控制或直接轉(zhuǎn)矩控制(DTC)策略。這些控制策略通過調(diào)節(jié)電機(jī)的電壓和電流來實(shí)現(xiàn)對(duì)速度的精確控制。
3. 轉(zhuǎn)子位置檢測(cè)
為了生成與轉(zhuǎn)子位置同步的正弦波電壓,控制器需要知道轉(zhuǎn)子的確切位置。這通常通過霍爾傳感器、編碼器或其他位置傳感器來實(shí)現(xiàn)。
4. 速度解碼方法
4.1 基于編碼器的速度解碼
編碼器是一種常用的位置傳感器,它可以提供轉(zhuǎn)子位置和速度信息。編碼器輸出的脈沖數(shù)與轉(zhuǎn)子的旋轉(zhuǎn)角度成正比,因此可以通過計(jì)算脈沖數(shù)來解碼速度。
4.1.1 編碼器類型
- 增量式編碼器 :提供一系列脈沖,每個(gè)脈沖對(duì)應(yīng)一個(gè)固定的角度增量。
- 絕對(duì)式編碼器 :提供唯一的編碼,表示轉(zhuǎn)子的確切位置。
4.1.2 速度計(jì)算
- 增量式編碼器 :速度可以通過測(cè)量單位時(shí)間內(nèi)脈沖數(shù)的變化來計(jì)算。
- 絕對(duì)式編碼器 :速度可以通過比較連續(xù)兩個(gè)位置編碼的差異來計(jì)算。
4.1.3 編碼器分辨率
編碼器的分辨率決定了速度測(cè)量的精度。分辨率越高,速度測(cè)量越精確。
4.2 基于霍爾傳感器的速度解碼
霍爾傳感器是一種無接觸式傳感器,可以檢測(cè)磁場(chǎng)的變化。在電機(jī)中,霍爾傳感器通常用于檢測(cè)轉(zhuǎn)子的位置。
4.2.1 霍爾傳感器工作原理
霍爾傳感器通過檢測(cè)轉(zhuǎn)子磁場(chǎng)的變化來確定轉(zhuǎn)子的位置。當(dāng)轉(zhuǎn)子磁場(chǎng)通過霍爾傳感器時(shí),傳感器會(huì)產(chǎn)生一個(gè)電壓信號(hào)。
4.2.2 速度計(jì)算
速度可以通過測(cè)量霍爾傳感器輸出信號(hào)的頻率來計(jì)算。信號(hào)的頻率與轉(zhuǎn)子的旋轉(zhuǎn)速度成正比。
4.3 基于電流和電壓測(cè)量的速度解碼
在某些情況下,可以通過測(cè)量電機(jī)的電流和電壓來間接計(jì)算速度。
4.3.1 電流測(cè)量
電機(jī)的電流與轉(zhuǎn)矩成正比,而轉(zhuǎn)矩與速度的關(guān)系可以通過電機(jī)的轉(zhuǎn)矩-速度曲線來確定。
4.3.2 電壓測(cè)量
電機(jī)的電壓與轉(zhuǎn)子的電磁場(chǎng)有關(guān)。通過測(cè)量電壓,可以估計(jì)轉(zhuǎn)子的位置,進(jìn)而計(jì)算速度。
4.3.3 速度計(jì)算
速度可以通過結(jié)合電流和電壓測(cè)量值來計(jì)算。這通常涉及到復(fù)雜的數(shù)學(xué)模型和算法。
5. 控制器設(shè)計(jì)
設(shè)計(jì)正弦波控制器時(shí),需要考慮以下因素:
- 電機(jī)參數(shù) :包括電機(jī)的額定電壓、額定電流、額定速度等。
- 控制策略 :選擇合適的控制策略,如矢量控制或直接轉(zhuǎn)矩控制。
- 傳感器選擇 :根據(jù)應(yīng)用需求選擇合適的位置傳感器。
- 硬件設(shè)計(jì) :包括電源管理、信號(hào)處理、驅(qū)動(dòng)電路等。
6. 實(shí)際應(yīng)用
在實(shí)際應(yīng)用中,正弦波控制器的速度解碼需要考慮多種因素,如環(huán)境溫度、電機(jī)負(fù)載、電源波動(dòng)等。這些因素都可能影響速度的測(cè)量和控制。
7. 故障診斷和維護(hù)
為了確保正弦波控制器的穩(wěn)定運(yùn)行,需要定期進(jìn)行故障診斷和維護(hù)。這包括檢查傳感器、檢查電源和信號(hào)線路、以及檢查控制算法的準(zhǔn)確性。
8. 結(jié)論
正弦波控制器的速度解碼是一個(gè)復(fù)雜的過程,涉及到電機(jī)控制理論、傳感器技術(shù)、信號(hào)處理和算法設(shè)計(jì)等多個(gè)領(lǐng)域。通過深入了解這些領(lǐng)域,可以設(shè)計(jì)出高效、可靠的正弦波控制器,實(shí)現(xiàn)對(duì)電機(jī)速度的精確控制。
-
控制器
+關(guān)注
關(guān)注
112文章
16332瀏覽量
177803 -
正弦波
+關(guān)注
關(guān)注
11文章
642瀏覽量
55339 -
電子設(shè)備
+關(guān)注
關(guān)注
2文章
2752瀏覽量
53727 -
驅(qū)動(dòng)電機(jī)
+關(guān)注
關(guān)注
9文章
409瀏覽量
30717
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
把三角波轉(zhuǎn)換成正弦波的寬帶正弦波轉(zhuǎn)換器
正弦波發(fā)生電路原理
正弦波濾波器原理_正弦波濾波器的作用
直流無刷電機(jī)的正弦波控制介紹
矢量控制器和正弦波控制器的區(qū)別
為什么用在有齒無刷電機(jī)的控制器是方波而不是正弦波輸出?
為什么用在有齒無刷電機(jī)的控制器是方波而不是正弦波輸出?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論