 GPU還是CPU?看完這個你就懂了
GPU還是CPU?看完這個你就懂了
GPU,是Graphics ProcessingUnit的簡寫,是現代顯卡中非常重要的一個部分,其地位與CPU在主板上的地位一致,主要負責的任務是加速圖形處理速度。
GPU是顯示卡的“大腦”,它決定了該顯卡的檔次和大部分性能,同時也是2D顯示卡和3D顯示卡的區別依據。2D顯示芯片在處理3D圖像和特效時主要依賴CPU的處理能力,稱為“軟加速”。3D顯示芯片是將三維圖像和特效處理功能集中在顯示芯片內,也即所謂的“硬件加速”功能。
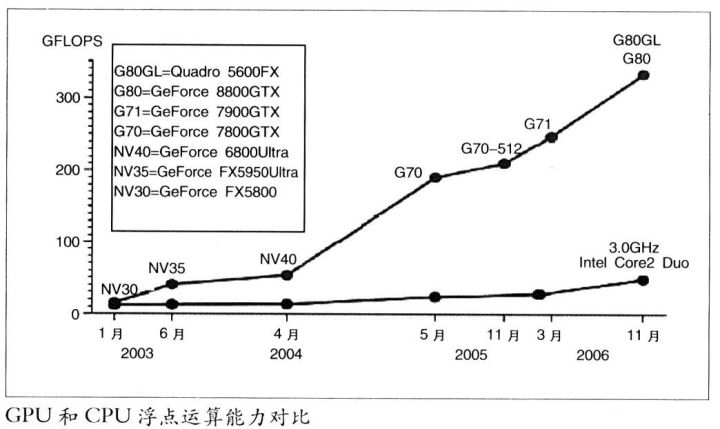
今天,GPU已經不再局限于3D圖形處理了,GPU通用計算技術發展已經引起業界不少的關注,事實也證明在浮點運算、并行計算等部分計算方面,GPU可以提供數十倍乃至于上百倍于CPU的性能,如此強悍的性能已經讓CPU廠商老大英特爾為未來而緊張。
GPU的誕生與發展
NVIDIA公司在1999年8月31日發布GeForce 256圖形處理芯片時首先提出GPU的概念。GPU之所以被稱為圖形處理器,最主要的原因是因為它可以進行幾乎全部與計算機圖形有關的數據運算,而這些在過去是CPU的專利。
從GPU誕生那天開始,其發展腳步就沒有停止下來,由于其獨特的體系架構和超強的浮點運算能力,人們希望將某些通用計算問題移植到GPU上來完成以提升效率,出現了所謂的GPGPU(General Purpose Graphic Process Unit),但是由于其開發難度較大,沒有被廣泛接受。
2006年NVIDIA推出了第一款基于Tesla架構的GPU(G80),GPU已經不僅僅局限于圖形渲染,開始正式向通用計算領域邁進。
2007年6月,NVIDIA推出了CUDA(ComputerUnified Device Architecture計算統一設備結構)。
CUDA是一種將GPU作為數據并行計算設備的軟硬件體系。在CUDA的架構中,不再像過去GPGPU架構那樣將通用計算映射到圖形API中,對于開發者來說,CUDA的開發門檻大大降低了。
CUDA的編程語言基于標準C,因此任何有C語言基礎的用戶都很容易地開發CUDA的應用程序。由于這些特性,CUDA在推出后迅速發展,被廣泛應用于石油勘測、天文計算、流體力學模擬、分子動力學仿真、生物計算、圖像處理、音視頻編解碼等領域。
GPU的結構
GPU實際上是一組圖形函數的集合,而這些函數有硬件實現,只要用于3D游戲中物體移動時的坐標轉換及光源處理。以前,這些工作都是有CPU配合特定軟件進行的,GPU從某種意義上講就是為了在圖形處理過程中充當主角而出現的。

上圖就是一個簡單的GPU結構示意圖,一塊標準的GPU主要包括2D Engine、3D Engine、VideoProcessing Engine、FSAA Engine、顯存管理單元等。其中,3D運算中起決定作用的是3DEngine,這是現代3D顯卡的靈魂,也是區別GPU等級的重要標志。
GPU的工作原理
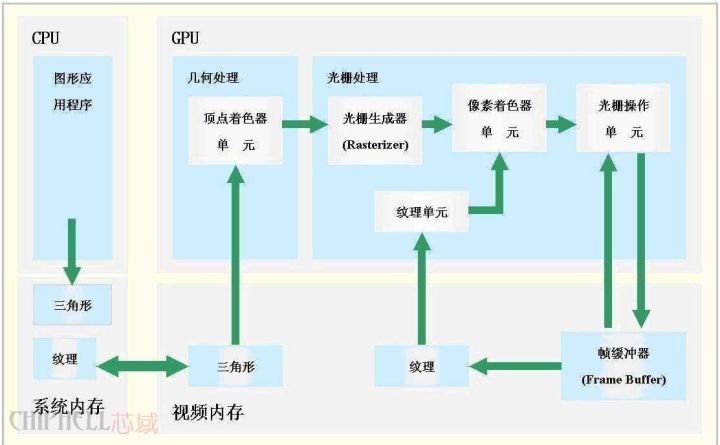
GPU中數據的處理流程
我們來看看第二代GPU是如何完整處理一個畫面。首先,來自CPU的各種物理參數進入GPU,Vertex shader將對頂點數據進行基本的判斷。如果沒有需要處理的Vertex效果,則頂點數據直接進入T&L Unit進行傳統的T&L操作以節約時間提高效率。如果需要處理各種Vertex效果,則Vertex shader將先對各種Vertex Programs的指令進行運算,一般的Vertex Programs中往往包含了過去轉換、剪切、光照運算等所需要實現的效果,故經由Vertexshader處理的效果一般不需要再進行T&L操作。另外,當遇到涉及到曲面鑲嵌(把曲面,比如弓形轉換成為多邊形或三角形)的場合時。CPU可以直接將數據交給Vertex shader進行處理。
另外,在DiretX8.0的Transform過程中,Vertexshader可以完成Z值的剔除,也就是Back Face Culling――陰面隱去。這就意味粉除了視野以外的頂點,視野內坡前面項點遮住的頂點也會被一并剪除,這大大減輕了需要進行操作的頂點數目。
接下來,經由VertexShader處理完成的各種數據將流入SetupEngine,在這里,運算單元將進行三角形的設置工作,這是整個繪圖過程中最重要的一個步驟,Setup Engine甚至直接影響著一塊GPU的執行效能。三角形的設置過程是由一個個多邊形組成的,或者是用更好的三角形代替原來的三角形。在三維圖象中可能會有些三角形被它前面的三角形擋住,但是在這個階段3D芯片還不知道哪些三角形會被擋住,所以三角形建立單元接收到是一個個由3個頂點組成的完整三角形。三角形的每個角(或頂點)都有對應的X軸、Y軸、Z軸坐標值,這些坐標值確定了它們在3D景物中的位置。同時,三角形的設置也確定了像素填充的范圍。,至此,VertexShader的工作就完成了。
在第一代GPU中,設置好的三角形本來應該帶著各自所有的參數進入像素流水線內進行紋理填充和演染,但現在則不同,在填充之前我們還播要進行PiexlShader的操作。其實,PieXIShader并非獨立存在的,它位于紋理填充單元之后,數據流入像紊流水線后先進入紋理填充單元進行紋理填充,然后便是Piex!Shader單元,經由PiexlShader單元進行各種處理運算之后再進入像素填充單元進行具體的粉色,再經由霧化等操作后,一個完整的畫面就算完成了。值得注意的是,第二代GPU中普遮引入了獨立的顯示數據管理機制,它們位于VertexShader、SetuPEngine以及像素流水線之間,負資數據更有效率地傳輸和組合、各種無效值的剔除、數據的壓縮以及寄存器的管理等工作,這個單元的出現對整個GPU工作效率的保證起到了至關重要的作用。

簡而言之,GPU的圖形(處理)流水線完成如下的工作:(并不一定是按照如下順序)
頂點處理:這階段GPU讀取描述3D圖形外觀的頂點數據并根據頂點數據確定3D圖形的形狀及位置關系,建立起3D圖形的骨架。在支持DX8和DX9規格的GPU中,這些工作由硬件實現的Vertex Shader(定點著色器)完成。
光柵化計算:顯示器實際顯示的圖像是由像素組成的,我們需要將上面生成的圖形上的點和線通過一定的算法轉換到相應的像素點。把一個矢量圖形轉換為一系列像素點的過程就稱為光柵化。例如,一條數學表示的斜線段,最終被轉化成階梯狀的連續像素點。
紋理帖圖:頂點單元生成的多邊形只構成了3D物體的輪廓,而紋理映射(texture mapping)工作完成對多變形表面的帖圖,通俗的說,就是將多邊形的表面貼上相應的圖片,從而生成“真實”的圖形。TMU(Texture mapping unit)即是用來完成此項工作。
像素處理:這階段(在對每個像素進行光柵化處理期間)GPU完成對像素的計算和處理,從而確定每個像素的最終屬性。在支持DX8和DX9規格的GPU中,這些工作由硬件實現的PixelShader(像素著色器)完成。
最終輸出:由ROP(光柵化引擎)最終完成像素的輸出,1幀渲染完畢后,被送到顯存幀緩沖區。
CPU與GPU的數據處理關系
如今的游戲,單單從圖象的生成來說大概需要下面四個步驟:
1、Homogeneouscoordinates(齊次坐標)
2、Shading models(陰影建模)
3、Z-Buffering(Z-緩沖)
4、Texture-Mapping(材質貼圖)
在這些步驟中,顯示部分(GPU)只負責完成第三、四步,而前兩個步驟主要是依靠CPU來完成。而且,這還僅僅只是3D圖象的生成,還沒有包括游戲中復雜的AI運算。場景切換運算等等……無疑,這些元素還需要CPU去完成,這就是為什么在運行大型游戲的時候,當場景切換時再強勁的顯卡都會出現停頓的現象。
接下來,讓我們簡單的看一下CPU和GPU之間的數據是如何交互的。
首先從硬盤中讀取模型,CPU分類后將多邊形信息交給GPU,GPU再時時處理成屏幕上可見的多邊形,但是沒有紋理只有線框。
模型出來后,GPU將模型數據放進顯存,顯卡同時也為模型貼材質,給模型上顏色。CPU相應從顯存中獲取多邊形的信息。然后CPU計算光照后產生的影子的輪廓。等CPU計算出后,顯卡的工作又有了,那就是為影子中填充深的顏色
這一點要注意的是,無論多牛的游戲家用顯卡,光影都是CPU計算的,GPU只有2個工作,1多邊形生成。2為多邊形上顏色。
傳統GPU指令的執行
傳統的GPU基于SIMD的架構。SIMD即Single Instruction Multiple Data,單指令多數據。
其實這很好理解,傳統的VS和PS中的ALU(算術邏輯單元,通常每個VS或PS中都會有一個ALU,但這不是一定的,例如G70和R5XX有兩個)都能夠在一個周期內(即同時)完成對矢量4個通道的運算。比如執行一條4D指令,PS或VS中的ALU對指令對應定點和像素的4個屬性數據都進行了相應的計算。這便是SIMD的由來。這種ALU我們暫且稱它為4D ALU。
需要注意的是,4D SIMD架構雖然很適合處理4D指令,但遇到1D指令的時候效率便會降為原來的1/4。此時ALU 3/4的資源都被閑置。為了提高PSVS執行1D 2D 3D指令時的資源利用率,DirectX9時代的GPU通常采用1D+3D或2D+2D ALU。這便是Co-issue技術。
這種ALU對4D指令的計算時仍然效能與傳統的ALU相同,但當遇到1D 2D 3D指令時效率則會高不少,例如如下指令:
ADD R0.xyz , R0,R1 //此指令是將R0,R1矢量的x,y,z值相加結果賦值給R0
ADD R3.x , R2,R3 //此指令是將R2 R3矢量的w值相加結果賦值給R3
對于傳統的4D ALU,顯然需要兩個周期才能完成,第一個周期ALU利用率75%,第二個周期利用率25%。而對于1D+3D的ALU,這兩條指令可以融合為一條4D指令,因而只需要一個周期便可以完成,ALU利用率100%。
但當然,即使采用co-issue,ALU利用率也不可能總達到100%,這涉及到指令并行的相關性等問題,而且,更直觀的,上述兩條指令顯然不能被2D+2D ALU一周期完成,而且同樣,兩條2D指令也不能被1D+3D ALU一周期完成。傳統GPU在對非4D指令的處理顯然不是很靈活。
GPU的多線程及并行計算
GPU的功能更新很迅速,平均每一年多便有新一代的GPU誕生,運算速度也越來越快。GPU的運算速度如此之快,主要得益于GPU是對圖形實時渲染量身定制的,具有兩點主要特征:超長流水線與并行計算。
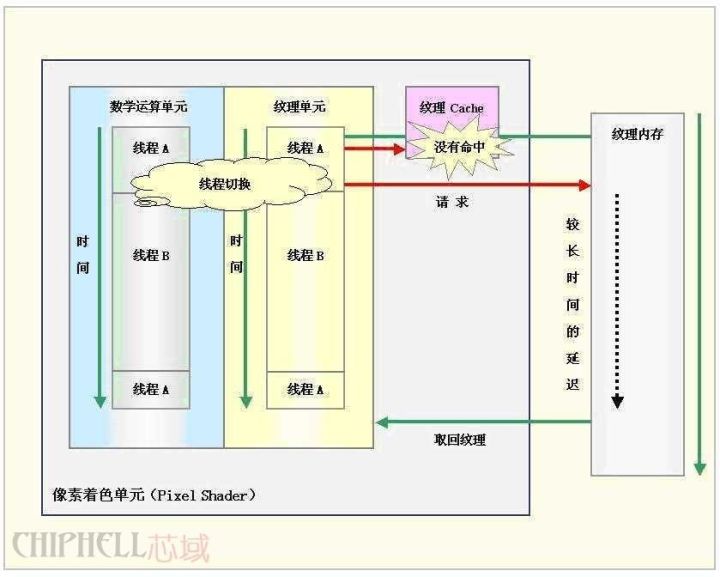
多線程機制
GPU的執行速度很快,但是當運行從內存中獲取紋理數據這樣的指令時(由于內存訪問是瓶頸,此操作比較緩慢),整個流水線便出現長時間停頓。在CPU內部,使用多級Cache來提高訪問內存的速度。GPU中也使用Cache,不過Cache命中率不高,只用Cache解決不了這個問題。所以,為了保持流水線保持忙碌,GPU的設計者使用了多線程機制(multi-threading)。當像素著色器針對某個像素的線程A遇到存取紋理的指令時,GPU會馬上切換到另外一個線程B,對另一個像素進行處理。等到紋理從內存中取回時,可再切換到線程A。
例如:如果裝配一臺汽車需要,10個時間單元,將它分成10個流水線階段,每個階段分配一個時間單元,那么一條裝配線每一個時間單元就可以生產一輛汽車。顯然流水線模式的生產在理想狀況下要比串行方式快了十倍。
但是使用這種方法有一個前提,線程A與線程B沒有數據依賴性,也就是說兩線程之間無需通訊。如果線程B需要線程A提供某些數據,那么即使切換到線程B,線程B仍是無法運行,流水線還是處于空閑狀態。不過幸運的是,圖形渲染本質上是一個并行任務。
并行計算
無論是CPU送給GPU的頂點數據,還是GPU光柵生成器產生的像素數據都是互不相關的,可以并行地獨立處理。而且頂點數據(xyzw),像素數據(RGBA)一般都用四元數表示,適合于并行計算。在GPU中專門設置了SIMD指令來處理向量,一次可同時處理四路數據。SIMD指令使用起來非常簡潔。此外,紋理片要么只能讀取,要么只能寫入,不允許可讀可寫,從而解決了存貯器訪問的讀寫沖突。GPU這種對內存使用的約束也進一步保證了并行處理的順利完成。
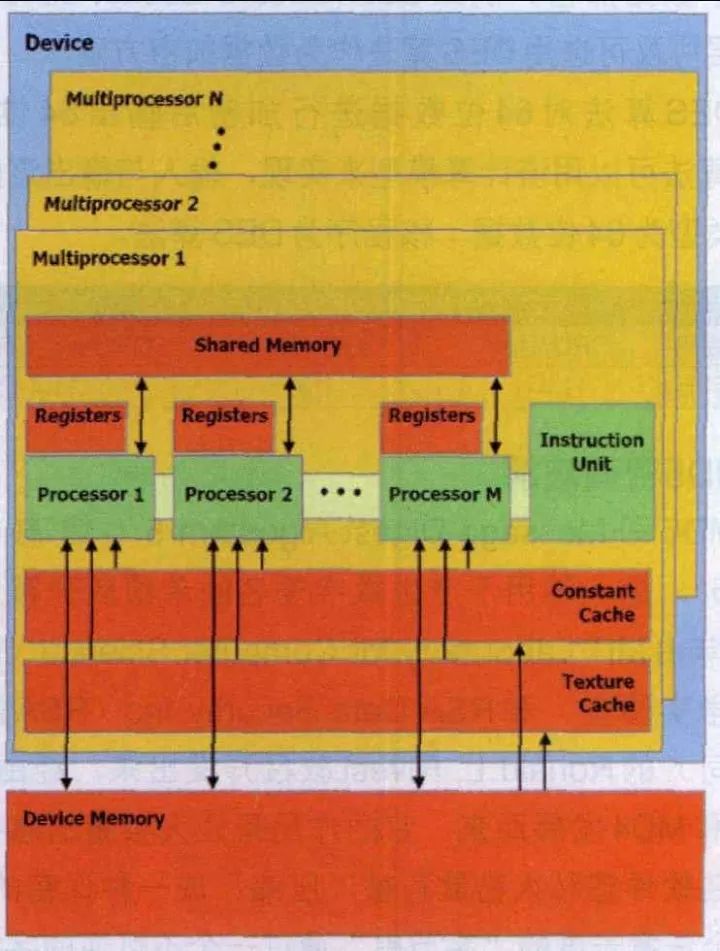
為了進一步提高并行度,可以增加流水線的條數。在GeForce 6800 Ultra中,有多達16組像素著色器流水線,6組頂點著色器流水線。多條流水線可以在單一控制部件的集中控制下運行,也可以獨立運行。在單指令多數據流(SIMD)的結構中,GPU通過單指令多數據(SIMD)指令類型來支持數據并行計算。『參見圖』在單指令多數據流的結構中,單一控制部件向每條流水線分派指令,同樣的指令被所有處理部件同時執行。例如NVIDIA8800GT顯卡中包含有14組多處理器(MultiProcessor),每組處理器有8個處理單元(Processor),但每組多處理器只包含一個指令單元(InstruetionUnit)。
另外一種控制結構是多指令多數據流(MIMD),每條流水線都能夠獨立于其他流水線執行不同的程序。GeForce 6800Ultra的頂點著色器流水線使用MIMD方式控制,像素著色器流水線使用SIMD結構。MIMD能比較有效率地執行分支程序,而SIMD體系結構運行條件語句時會造成很低的資源利用率。不過SIMD需要硬件少,這是一個優勢。
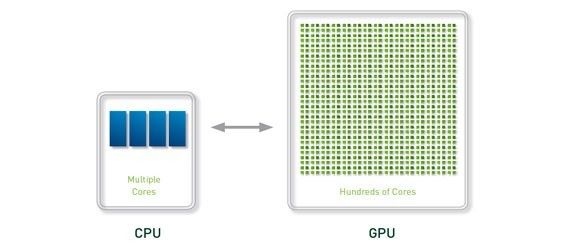
CPU中大部分晶體管主要用于構建控制電路和Cache,只有少部分的晶體管來完成實際的運算工作。而GPU的控制相對簡單,而且對Cache的需求小,所以大部分晶體管可以組成各類專用電路、多條流水線,使得GPU的計算速度有了突破性的飛躍,擁有了驚人的處理浮點運算的能力。現在CPU的技術進步正在慢于摩爾定律,而GPU的運行速度已超過摩爾定律,每6個月其性能加倍。
GPU在計算領域的應用現狀
隨著CUDA的進一步開發和完善,GPU的運算能力也將得到進一步的強化。研究人員也已經開始使用CUDA,利用GPU數倍于CPU的浮點運算能力,進行各種各樣的科學模擬、運算。
GPU專用于解決可表示為數據并行計算的問題——在許多數據元素上并行執行的程序,具有極高的計算密度(數學運算與存儲器運算的比率)。
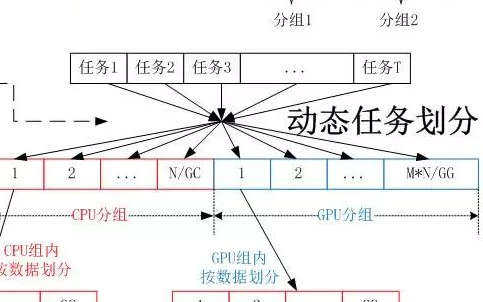
GPU計算的模式是,在異構協同處理計算模型中將CPU與GPU結合起來加以利用。應用程序的串行部分在CPU上運行,而計算任務繁重的部分則由GPU來加速。從用戶的角度來看,應用程序只是運行得更快了。因為應用程序利用了GPU的高性能來提升性能。
在過去幾年里,GPU的浮點性能已經上升到Teraflop級的水平。GPGPU的成功使CUDA并行編程模型相關的編程工作變得十分輕松。在這種編程模型中,應用程序開發者可修改他們的應用程序以找出計算量繁重的程序內核,將其映射到GPU上,讓GPU來處理它們。應用程序的剩余部分仍然交由CPU處理。想要將某些功能映射到GPU上,需要開發者重新編寫該功能,在編程中采用并行機制,加入“C”語言關鍵字以便與GPU之間交換數據。開發者的任務是同時啟動數以萬計的線程。GPU硬件可以管理線程和進行線程調度。
"GPU(圖形處理器)已經發展到了頗為成熟的階段,可輕松執行實際應用程序并且其運行速度已遠遠超過了使用多核系統時的速度。未來計算架構將是并行核心GPU與多核CPU串聯運行的混合型系統。"
中科院基因組研究所將在當今生物信息學領域得到廣泛應用的BLAST算法向GPU進行了移植。這是一套針對DNA、蛋白序列數據庫的序列查詢算法和軟件包。盡管BLAST處理少量序列的速度不慢,但隨著DNA側序技術的飛速發展,研究人員可以在短短幾天內得到海量序列數據,這樣,對這些數據的分析就成了瓶頸。通過從串行到并行的轉變,BLAST算法成功在GPU上得以實現,大大提升了效率。根據中科院的實踐結果,基于NVIDIA Tesla平臺的BLAST軟件中的一個關鍵模塊運行速度比單個CPU快35倍。
基于GPU,中科院過程所建立了一臺自己的超級計算系統。與通用系統比較,運營系統成本從約2億元降到不到2000萬元,峰值能耗從約1.5兆瓦降至不到0.3兆瓦,占地面積也明顯減少,然而其效率卻很高。在對中石化清潔汽油工藝的放大和優化模擬程序中,進行內部結構優化時,單CPU的處理效率為每天計算可以模擬4~5秒現實時間,而單GPU在一個小時內就可模擬3~5秒現實時間。
國內最快的超級計算機天河一號也采用了GPU處理器,其三分之二的計算能力由GPU處理器提供。
-
cpu
+關注
關注
68文章
10854瀏覽量
211583 -
NVIDIA
+關注
關注
14文章
4978瀏覽量
102987 -
gpu
+關注
關注
28文章
4729瀏覽量
128890
原文標題:都知道CPU 但GPU又是什么鬼?
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
CPU、GPU和內存知識科普

CPU和GPU擅長和不擅長的地方
CPU和GPU擅長和不擅長的地方
TensorFlow指定CPU和GPU設備操作詳解
cpu與gpu的區別 買電腦注重cpu還是顯卡
gpu和cpu有什么區別?
cpu gpu npu的區別 NPU與GPU哪個好?gpu是什么意思?
為什么GPU比CPU更快?

動畫渲染用GPU還是CPU的選擇思路





 工商網監
工商網監
評論