") 常見(jiàn)的微型運(yùn)動(dòng)傳感器如何進(jìn)行控制?這篇文章講透了
常見(jiàn)的微型運(yùn)動(dòng)傳感器如何進(jìn)行控制?這篇文章講透了
就在過(guò)去兩年中,運(yùn)動(dòng)傳感技術(shù)已經(jīng)開(kāi)始遍地開(kāi)花——視頻控制臺(tái)、智能手機(jī)、電視遙控器和個(gè)人訓(xùn)練設(shè)備——就在我們給手機(jī)照片打上地理標(biāo)簽、玩視頻游戲以及通過(guò)電視機(jī)和有線電視機(jī)頂盒進(jìn)行頻道沖浪之時(shí)。這些東西知道我們身處何方、我們的目標(biāo)是什么、我們向哪里移動(dòng)——上、下、四周和側(cè)面。使這些成為可能的是大量更小、更便宜和更快的新型傳感器。在經(jīng)過(guò)最佳集成后,它們能通過(guò)空間和時(shí)間精確地跟蹤我們的運(yùn)動(dòng)。這些傳感器套件(加速度計(jì)、陀螺儀和磁力傳感器)在跟蹤運(yùn)動(dòng)方面具有令人吃驚的能力,特別是與如今無(wú)所不在的GPS結(jié)合在一起之后。
但這些微型傳感器的潛力仍未被充分發(fā)掘,這里兩個(gè)簡(jiǎn)單的原因。首先,提取出它們的數(shù)據(jù)并將這些數(shù)據(jù)整合成精確可靠的指向和跟蹤信息是一種比大多數(shù)人想象的更具挑戰(zhàn)性的算法操作,經(jīng)常需要耗費(fèi)大量人力時(shí)間。其次,在硬件和應(yīng)用工程師之間有一個(gè)普遍(但錯(cuò)誤)的假設(shè),即大多數(shù)傳感器提供相似的性能水平,因此通常來(lái)自傳感器的數(shù)據(jù)不能滿足他們的應(yīng)用需求。
一般集成進(jìn)消費(fèi)產(chǎn)品的運(yùn)動(dòng)檢測(cè)傳感器包括3軸陀螺儀、3軸加速度計(jì)和3軸地磁傳感器。在運(yùn)動(dòng)跟蹤和絕對(duì)方向方面每種傳感器都有自己固有的強(qiáng)項(xiàng)和弱點(diǎn)。最近,傳感器“融合”正在進(jìn)入廣大消費(fèi)產(chǎn)品,成為一種克服單種傳感器弱點(diǎn)的有效方法。傳感器融合是一種復(fù)雜的軟件,它將來(lái)自各種傳感器的輸入組合在一起,產(chǎn)生一個(gè)更加精確的運(yùn)動(dòng)檢測(cè)結(jié)果。這種軟件通常包含復(fù)雜的算法,如果正確實(shí)現(xiàn)的話可以綜合考慮幾百個(gè)變量。
3軸加速度傳感器
加速度計(jì)通過(guò)測(cè)量給定直線軸向的彈簧上的力來(lái)檢測(cè)直線加速度和重力矢量。加速度計(jì)是第一種出現(xiàn)在大批量應(yīng)用中的MEMS傳感器,可以用來(lái)實(shí)現(xiàn)汽車(chē)中的氣囊部署、照相機(jī)中的圖像防抖和筆記本中的自由落體檢測(cè)等功能。任天堂的Wii游戲機(jī)是第一種引入加速度計(jì)作為用戶(hù)輸入設(shè)備的主要消費(fèi)產(chǎn)品,可以提供手勢(shì)識(shí)別、基本的運(yùn)動(dòng)跟蹤和控制器定位等功能。現(xiàn)在基于許多理由,加速度計(jì)已經(jīng)在智能手機(jī)和平板電腦中十分普及,包括檢測(cè)設(shè)備朝向、將屏幕從豎屏調(diào)整到橫屏然后再調(diào)整回來(lái)等功能。
加速度計(jì)在運(yùn)動(dòng)跟蹤方面有兩個(gè)主要的缺點(diǎn),即:
● 加速度計(jì)不能建立絕對(duì)或相對(duì)的航向。當(dāng)安裝在一個(gè)固定的設(shè)備中時(shí),3軸加速度計(jì)可以測(cè)量單個(gè)加速度軸上的加速度。如圖1所示,當(dāng)處于固定狀態(tài)時(shí),可以根據(jù)垂直重力加速度矢量計(jì)算出滾動(dòng)和傾斜角度。然而,航向是圍繞Z軸得到的,無(wú)法從重力矢量計(jì)算出航向。因此,加速度計(jì)不能提供航向。
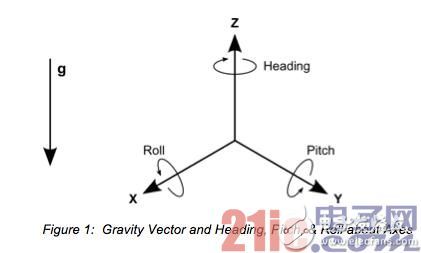
圖1:重力矢量和圍繞軸的航向、傾斜和滾動(dòng)。
● 加速度計(jì)對(duì)運(yùn)動(dòng)太過(guò)敏感,極易導(dǎo)致手的抖動(dòng)。在短時(shí)間內(nèi)這是非常令人惱火的,因?yàn)樗馕吨鈽?biāo)或屏幕渲染的目標(biāo)也會(huì)抖動(dòng)。幾分鐘以上的抖動(dòng)將導(dǎo)致顯著的累積方向或位置誤差,特別是當(dāng)加速度計(jì)的噪聲與抖動(dòng)在相同數(shù)量級(jí)時(shí)。目前廣泛使用的低成本消費(fèi)級(jí)加速度計(jì)的噪聲要比價(jià)格更高、體積更大、功耗更高的工業(yè)級(jí)加速度計(jì)大得多,如圖2所示。
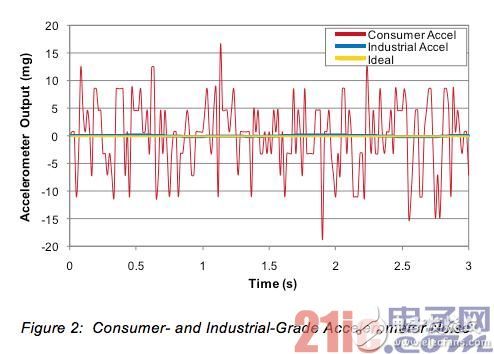
圖2:消費(fèi)級(jí)和工業(yè)級(jí)加速度計(jì)噪聲。
3軸陀螺儀傳感器
陀螺儀(也稱(chēng)為回轉(zhuǎn)儀或角速度傳感器)可以測(cè)量圍繞軸的旋轉(zhuǎn)角速度,并通過(guò)推導(dǎo)得到圍繞軸的旋轉(zhuǎn)角度。從20世紀(jì)早期推出以來(lái),陀螺儀已經(jīng)從巨大的銅制臺(tái)式模型縮小到今天的低成本低功耗小型MEMS芯片,可以安裝在指甲蓋下方。消費(fèi)級(jí)陀螺儀于90年代中期最先集成進(jìn)Gyration公司的Air Mouse,后來(lái)MEMS陀螺儀被廣泛用于羅技的MX Air定點(diǎn)設(shè)備和LG的智能電視機(jī)遙控器等產(chǎn)品中。任天堂的Wii通過(guò)在Motion Plus控制器中增加陀螺儀進(jìn)一步增強(qiáng)了游戲體驗(yàn)。陀螺儀還被添加進(jìn)iPhone 3GS中,用于擴(kuò)展游戲潛能,改進(jìn)基于位置的服務(wù)(LBS)功能的可用性。
就跟加速度計(jì)一樣,陀螺儀也有不足:
● 陀螺儀不能提供絕對(duì)基準(zhǔn)。因?yàn)檫@個(gè)原因,它們通常與加速度計(jì)一起使用,由加速度計(jì)提供向“下”的絕對(duì)基準(zhǔn),從而也為傾斜和滾動(dòng)讀數(shù)提供絕對(duì)基準(zhǔn)。陀螺儀經(jīng)常還要與地磁傳感器一起使用,由后者提供航向的絕對(duì)基準(zhǔn)。
● 陀螺儀的零偏或零偏移會(huì)隨時(shí)間漂移。如果不及時(shí)校正,將成為系統(tǒng)誤差的一個(gè)主要來(lái)源。例如,即使系統(tǒng)實(shí)際處于停止?fàn)顟B(tài),陀螺儀輸出也會(huì)報(bào)告系統(tǒng)在移動(dòng)。作為參考,錯(cuò)誤零偏讀數(shù)為0.07°,對(duì)消費(fèi)級(jí)陀螺儀來(lái)說(shuō)這是分辨率極限,在30秒后將導(dǎo)致2.1°的誤差。圖3顯示了在8分鐘周期內(nèi)典型的未校正零偏變化,而圖4顯示了這種誤差是如何轉(zhuǎn)變成航向的。
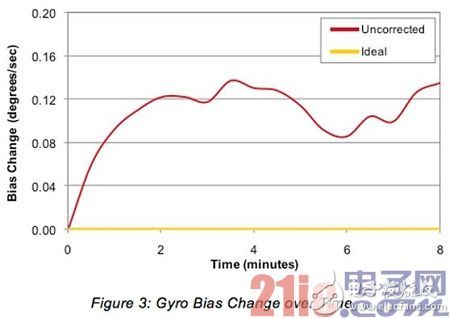
圖3:陀螺儀隨時(shí)間的偏移變化。
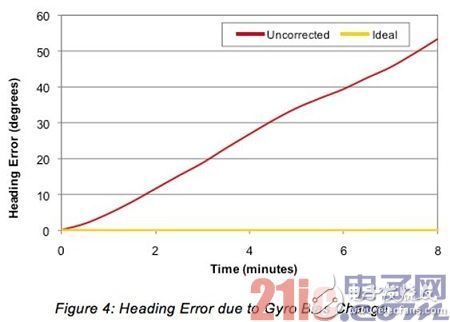
圖4:由于陀螺儀零偏變化引起的航向誤差。
3軸地磁傳感器
地磁傳感器用于測(cè)量地球的磁場(chǎng),進(jìn)而推導(dǎo)出航向。歷史上曾用于羅盤(pán)的地磁傳感器如今被大批量用于種類(lèi)廣泛的應(yīng)用,包括汽車(chē)羅盤(pán)(在后視鏡中)、手表、雷達(dá)探測(cè)器、傳動(dòng)軸和機(jī)器人。然而,真正廣泛的采用起始于iPhone 3GS,它是美國(guó)首款包含羅盤(pán)并得到廣泛普及的智能手機(jī)。
● 磁力傳感器的主要問(wèn)題是它們測(cè)量所有磁場(chǎng),不僅是地球磁場(chǎng)。例如,像電池或含鐵元件等系統(tǒng)元件將干擾傳感器附近的磁場(chǎng)。這些被認(rèn)為是系統(tǒng)內(nèi)的固定干擾,可以通過(guò)校準(zhǔn)進(jìn)行補(bǔ)償。
● 更大的問(wèn)題是改變局部磁場(chǎng)會(huì)臨時(shí)性地干擾航向信息。桌椅上的金屬部件、開(kāi)過(guò)的汽車(chē)、附近的其它手機(jī)和電腦、窗框、建筑物內(nèi)的雷達(dá)等物件都會(huì)干擾讀數(shù)。補(bǔ)償這些磁場(chǎng)和其它瞬時(shí)地磁異常要求開(kāi)發(fā)出復(fù)雜的算法,以便有效地將地球的磁場(chǎng)與其它臨時(shí)性“侵入”磁場(chǎng)區(qū)分開(kāi)來(lái)。
傳感器融合——將傳感器轉(zhuǎn)變?yōu)檫\(yùn)動(dòng)跟蹤
如前所述,加速度計(jì)、陀螺儀和地磁傳感器每個(gè)都有各自的優(yōu)缺點(diǎn)。下表1總結(jié)了每種傳感器在運(yùn)動(dòng)跟蹤方面的主要優(yōu)勢(shì)和問(wèn)題。
正如表1總結(jié)的那樣,一種傳感器的優(yōu)勢(shì)常常是另一種傳感器的問(wèn)題,反之亦然。通過(guò)智能地“融合”它們的輸出,依靠一個(gè)輸出調(diào)整或代替另一個(gè)的結(jié)果,我們可以創(chuàng)建出一個(gè)9軸的運(yùn)動(dòng)跟蹤系統(tǒng),其性能將遠(yuǎn)好于這些器件的簡(jiǎn)單累加。
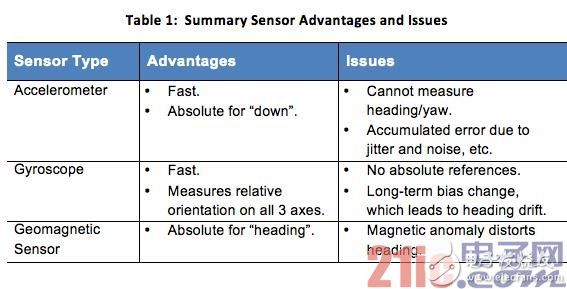
表1:傳感器優(yōu)勢(shì)和問(wèn)題總結(jié)。
今天,9軸“傳感器融合”系統(tǒng)剛剛開(kāi)始普及。陀螺儀被確立為這些融合系統(tǒng)的主力,因?yàn)樗哂辛己玫亩唐诟櫨取⒖焖俚捻憫?yīng)和更新速率以及對(duì)非重力加速度的免疫。陀螺儀的問(wèn)題——1)沒(méi)有絕對(duì)基準(zhǔn)2)由于零偏漂移而具有嚴(yán)重的航向漂移——可以通過(guò)聯(lián)合運(yùn)用加速度計(jì)和地磁傳感器一起解決。地磁傳感器和加速度計(jì)可以給陀螺儀提供航向、傾斜和滾動(dòng)用的長(zhǎng)期絕對(duì)基準(zhǔn)。
但運(yùn)動(dòng)跟蹤的最終精度直接取決于來(lái)自各個(gè)傳感器的原始輸入有多好。正如我們將要看到的那樣,并不是所有地磁傳感器都提供相同的結(jié)果。
在今天的消費(fèi)電子產(chǎn)品中使用最廣泛的地磁傳感器是霍爾效應(yīng)傳感器。這種傳感器主導(dǎo)消費(fèi)市場(chǎng)的原因是體積小、價(jià)格低并且節(jié)省功耗。但這種傳感器同樣有噪聲,很容易受其它磁場(chǎng)干擾,這些問(wèn)題如果不校正將限制其向陀螺儀提供正確航向數(shù)據(jù)的能力。然而,如果能夠接受稍大尺寸的永磁感應(yīng)式地磁傳感器,就可以在不犧牲成本或功耗的情況下獲得顯著改進(jìn)的噪聲與分辨率性能。表2顯示了霍爾效應(yīng)和永磁感應(yīng)傳感器的規(guī)格。注意,永磁感應(yīng)傳感器可以提供明顯更低的噪聲和更高的分辨率。
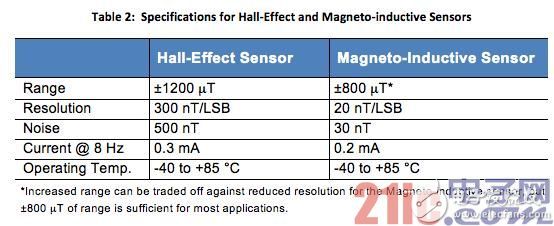
表2:霍爾效應(yīng)和永磁感應(yīng)傳感器規(guī)格。
下圖顯示了地磁傳感器在磁場(chǎng)強(qiáng)度為2.4mT數(shù)量級(jí)的固定位置旋轉(zhuǎn)時(shí)輸出的磁場(chǎng)讀數(shù)。在圖5中,傳感器旋轉(zhuǎn)了整整360°,而在圖6中,傳感器從0°旋轉(zhuǎn)到90°。這兩張圖都繪出了霍爾效應(yīng)傳感器、永磁感應(yīng)傳感器和理想傳感器的試驗(yàn)數(shù)據(jù)。
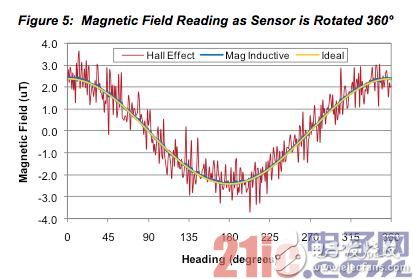
圖5:當(dāng)傳感器旋轉(zhuǎn)360°時(shí)的磁場(chǎng)讀數(shù)。
從圖中可以看出,霍爾效應(yīng)傳感器的噪聲要比永磁感應(yīng)傳感器大得多。這與器件參數(shù)規(guī)格一致,因?yàn)榛魻栃?yīng)傳感器的噪聲指標(biāo)為500nT,而永磁感應(yīng)傳感器噪聲指標(biāo)要低一個(gè)數(shù)量級(jí),只有30nT。如圖6所示,對(duì)霍爾效應(yīng)傳感器來(lái)說(shuō),可以在多個(gè)方向觀察到2mT的磁場(chǎng)讀數(shù),而2mT的讀數(shù)可以代表從5°到60°的任何航向。雖然超采樣可以減少這種不確定性,但這種非常明顯的傳感器噪聲差異確實(shí)會(huì)導(dǎo)致很大的測(cè)量不確定性。這種噪聲差異和相關(guān)測(cè)量的不確定性將顯著影響9軸傳感器融合算法的性能表現(xiàn)。
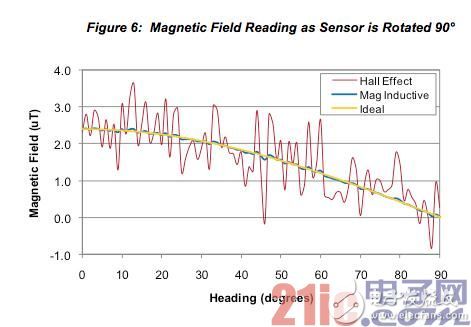
圖6:傳感器旋轉(zhuǎn)90°時(shí)的磁場(chǎng)讀數(shù)。
前面的圖3給出了隨時(shí)間變化的陀螺儀零偏,它代表了長(zhǎng)期航向漂移的根本原因。在9軸傳感器融合系統(tǒng)中,加速度計(jì)和磁力傳感器建立了一個(gè)長(zhǎng)期的基準(zhǔn)用于校正零偏變化。但磁力傳感器讀數(shù)中的噪聲以及磁力傳感器類(lèi)型對(duì)零偏校正的效果有顯著的影響。圖7再次顯示了隨時(shí)間改變的零偏變化,但這次畫(huà)出了未校正的、用霍爾效應(yīng)傳感器校正的、用永磁感應(yīng)傳感器校正的和理想輸出的圖形。值得注意的是,所用的傳感器融合算法對(duì)兩種傳感器來(lái)說(shuō)是相同的。

圖7:隨時(shí)間改變的陀螺儀零偏,包括校正和未校正的情況。
從圖7可以明顯看出,使用永磁感應(yīng)傳感器的9軸傳感器融合系統(tǒng)在盡量減小零偏變化方面做得比霍爾效應(yīng)傳感器要好。這種零偏漂移方面的改進(jìn)直接得益于永磁感應(yīng)傳感器低一個(gè)數(shù)量級(jí)的噪聲,因?yàn)榛魻栃?yīng)傳感器相對(duì)較高的噪聲將在傳感器融合算法中引入不確定性,進(jìn)而減弱算法控制零偏的能力。
永磁感應(yīng)傳感器可以更好地控制零偏漂移的能力將顯著改善隨時(shí)間變化的航向性能,如圖8所示。我們?cè)谶@里可以看到,與未校正系統(tǒng)相比,使用霍爾效應(yīng)傳感器的傳感器融合系統(tǒng)的長(zhǎng)期性能在8分鐘內(nèi)減少航向誤差的效果高出2倍。但使用永磁感應(yīng)傳感器的傳感器融合系統(tǒng)與未校正系統(tǒng)相比可以減少航向誤差一個(gè)數(shù)量級(jí),比基于霍爾效應(yīng)磁力傳感器的系統(tǒng)好5倍。
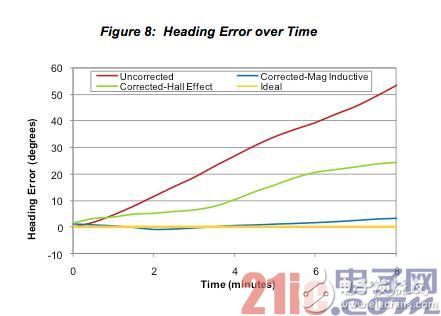
圖8:隨時(shí)間改變的航向誤差。
本文小結(jié)
隨著使用永磁感應(yīng)式地磁傳感器代替霍爾效應(yīng)傳感器的9軸傳感系統(tǒng)的廣泛普及,精確定位移動(dòng)所需的資源已經(jīng)就位。首先要理解精度和準(zhǔn)確度遠(yuǎn)高于目前的“移動(dòng)接近”系統(tǒng)的運(yùn)動(dòng)跟蹤世界可能性,然后才能明白這個(gè)世界中的增強(qiáng)現(xiàn)實(shí)將更具無(wú)限可行性、游戲玩起來(lái)更直觀、基于位置的應(yīng)用也將更具魯棒性。
-
陀螺儀
+關(guān)注
關(guān)注
44文章
783瀏覽量
98667 -
加速度計(jì)
+關(guān)注
關(guān)注
6文章
700瀏覽量
45891 -
加速度傳感器
+關(guān)注
關(guān)注
12文章
471瀏覽量
55140 -
運(yùn)動(dòng)傳感器
+關(guān)注
關(guān)注
9文章
164瀏覽量
30765 -
地磁傳感器
+關(guān)注
關(guān)注
1文章
44瀏覽量
18092
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
請(qǐng)問(wèn)傳感器編程如何進(jìn)行?
在運(yùn)動(dòng)控制中,傳感器是控制的關(guān)鍵部分
如何進(jìn)行有效超低功率傳感器控制器設(shè)計(jì)?
運(yùn)動(dòng)控制器是如何進(jìn)行設(shè)計(jì)的?
微型傳感器怎么分類(lèi)?
EtherCAT總線運(yùn)動(dòng)控制器硬件是如何進(jìn)行接線的?
SHT10溫濕度傳感器是如何進(jìn)行通信的
Tof傳感器是如何進(jìn)行校準(zhǔn)的?
微型傳感器種類(lèi)_微型傳感器OFweek Mall應(yīng)用領(lǐng)域
傳感器在運(yùn)動(dòng)控制系統(tǒng)中起到了核心的作用
MEMS運(yùn)動(dòng)傳感器原理
傳感器在運(yùn)動(dòng)控制中的應(yīng)用分析
基于運(yùn)動(dòng)傳感器的光控制






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論